
移动三维激光扫描在运营地铁维保中的应用
2021-12-03 07:29:38许诗旋
地理空间信息 2021年11期
许诗旋
(1.中铁第四勘察设计院集团有限公司,湖北 武汉 430063)
随着我国轨道交通行业的迅猛发展,运营监测作为保障地铁健康运营的一大基础内容,越来越受到重视。截至2019年底,我国已有40个城市开通了轨道交通,线路运营总里程超过6 700 km。地铁隧道断面监测是保证地铁安全运行的一项重要监测内容[1],也是隧道维保工作的基础。地铁盾构隧道的断面监测面临着诸多难题,其中最突出的问题为:①传统的断面监测方法得到的是特定位置的非连续性数据,无法实现高密度采集,无法得到隧道内部的整体变化情况; ②运营期监测作业时间严格受天窗点约束,必须在规定时间内完成大量的测量工作,对监测手段采集速度提出了更高的要求。鉴于此,传统的全站仪测量法、激光隧道断面仪测量法、站式三维激光扫描法的作业量大、周期长,已不能适应运营期盾构隧道的断面监测工作,本文提出了利用移动三维激光扫描技术进行运营地铁盾构隧道维保监测的方法,并介绍了该方法在某运营地铁盾构隧道维保监测中的成功应用。
1 运营地铁隧道病害整治
1.1 病害成因
在列车长期运行振动和周边工程施工扰动等因素的作用下,地铁盾构隧道在运营期将不可避免地出现一系列病害现象,这将影响到地铁运营的安全性、经济性和耐久性[2]。地铁盾构隧道在整个运营期间的横截面,理论上要求是圆形且空间位置稳定的[3],但由于隧道运营过程中列车行驶环境、地质以及其他基建活动的影响,地铁隧道底部空间位置和自身物理形态均会发生偏差和变化。隧道的维保监测就是对上述偏差和变化进行监控的过程。盾构隧道内部变形问题常见的病害成因往往与隧道下部地层的地质条件有关,当隧道处于淤泥质地层中时,隧道通常易下沉、侧向抗力较低、易产生椭变。同时,列车长期循环作用将引起下部土体累积变形,进而产生沉降;列车荷载引起土体累积孔压消散,产生再固结沉降;当隧道发生不均匀沉降时,盾构隧道管片也易产生椭变。
1.2 维保监测的常用方法
运营地铁隧道的运营性质极大地限制了维保监测过程,隧道内实际监测作业的时间窗口和空间测量条件均受到较大约束。运营隧道维保监测的常用方法包括:①全站仪测量法[4],其单点测量精度较高,但受工作效率限制只能采用较小的采样密度,易产生错漏,且需大量人工成本,采集效率低;②激光隧道断面 仪[5]可快速测量隧道断面,但精度和执行度不稳定,也无法实现高密度采集[6];③站式三维激光扫描解决了全面获取隧道内部点云数据的问题,但需每隔一段距离设站一次,并对不同站数据进行拼接,存在测量速度慢、点云密度不均匀、重叠部分有大量数据冗余的问题,不能满足运营期地铁监测天窗作业时间短的需求[7]。移动三维激光扫描技术[8]操作简单,同时具备极高的隧道作业效率,不仅解决了传统测量方式在运营地铁盾构隧道断面监测中监测信息不全的问题,而且其快速、高效、便捷的测量方式也能满足运营期监测快速测量的需要。其主要测量和分析工作在计算机上进行,因此在运营地铁盾构隧道维保监测中具有明显优势。
2 移动三维激光扫描系统
2.1 系统工作原理
移动三维激光扫描系统是针对轨道交通运维管理研发的信息化快速检测装备。系统将高精度、高频率、智能化的传感器安装在轨道小车上,采用人工推行的方式,快速采集轨道及其周围环境内的激光点云数据,实现对轨道的高精度全方位快速检测[9]。
系统将激光器固定在轨道小车上,由移动平台向目标物体发射高频激光束,感测器接收物体返回的激光信号并记录时间差(相位差),从而得到目标物体与激光器的距离。
目标到激光器的距离可表示为R=ct/2,其中t=φ/ω,则有:

式中,φ为信号往返一次的总相位延迟;ω为调制信号的角频率,ω=2πf;U为1/4调制波长;N为测线包含的半波长个数;Δφ为信号往返一次产生的不足π的相位延迟;ΔN=Δφ/ω。
在标准大气条件和给定调制频率下,R=c/4πf是一个固定值,激光器到目标的距离就转换为测线包含的半波长个数和不足半波长的部分[10],再根据传播时间即可得到对地距离。
全球导航卫星系统(GNSS)提供了精密动态定位(在隧道内部仅提供精确授时),惯性测量单元(IMU)能获取惯性姿态向量。系统将每次扫描建立为从激光器到目标反射点间的空间向量,结合激光器的高度和扫描角度信息计算得到目标物体相对于激光器的三维坐标,再结合IMU推算激光器的位置,最终得到目标物体精确的坐标位置[11]。系统工作原理如图1 所示。
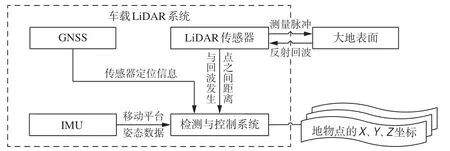
图1 移动三维激光扫描系统的工作原理
2.2 系统硬件结构
移动三维激光扫描系统主要由Z+F 9012激光断面扫描仪、高精度IMU、双频三星GNSS板卡(含天线)、车轮编码器与安装组件、多传感器同步控制电路与存储单元、电源管理与保护模块、平板计算机/笔记本电脑等硬件集成,如图2所示。

图2 移动三维激光扫描系统的硬件外观
1)Z+F 9012激光断面扫描仪。测量频率为100 万点/s,扫描频率为200 圈/s,测距精度≤1 mm,测角精度≤ 0.02e,最小测量距离≤0.5 m,满足移动三维激光 扫描系统在人工推行工况下,点云测量mm级精度的需求。
2)定位定姿模块。由IMU32激光惯导和车轮编码器组成定位定姿模块,用以提供位姿信息。车轮编码器分辨率高于1 000 PPR,误差低于0.5‰,以保证系统在20 min无控条件下,定位定姿精度满足要求。
3)同步控制器。系统通过秒脉冲信号PPS实现系统时间与世界时间的统一,通过内部晶振计时器实现内部时间的稳定。系统的时间同步精度优于0.05 ms,时间系统稳定性优于10-8s。
4)其他附属设备。系统还集成了数据预处理与存储模块、GNSS定位模块、供电与保护模块等附属设备模块,以支撑数据采集作业。
2.3 隧道环片椭圆拟合
由于盾构隧道由预制管片拼装并由螺栓连接而成,大量的结构接缝使得隧道抵抗变形的能力较弱,外荷载作用下的结构变形主要表现为断面椭圆化变 形[12]。常见的椭圆拟合[13]包括最小二乘法、Hough变换、最小子集椭圆拟合法等。本文采用随机抽样一致性(RANSAC)算法[14]与最小二乘法相结合的方法,对隧道断面进行椭圆拟合。RANSAC算法是一种能在包含异常数据的样本集中,通过数学模型得到有效样本的数据算法,可用于查找与隧道轮廓最接近的点云数据,从而有效过滤掉其他噪点数据,进而提高拟合效果。RANSAC算法拟合断面椭圆详见参考文献[15]。
椭圆标准方程可表示为:

式中,A、B、C、D、E为椭圆参数。
实际隧道断面由于拼装误差和运营过程中的变化会与标准椭圆存在差异,将点云中P点坐标代入椭圆标准方程将产生偏差VP,即

将三维激光扫描点云坐标代入式(3),根据最小二乘法原理,可得到椭圆参数。

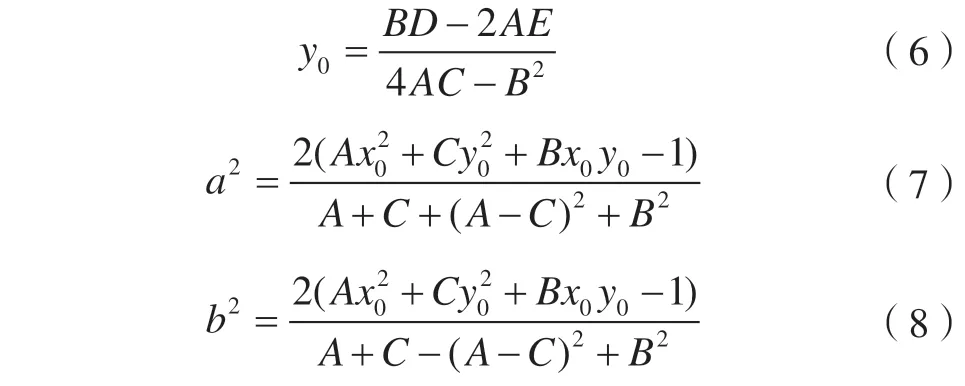
将椭圆参数代入式(4)~(8),即可得到拟合椭圆及其长半轴a、短半轴b、圆心坐标(x0,y0)和偏转角α。隧道椭圆度是指隧道横断面上最大外径与最小外径之差[16],可表示为:

式中,L为隧道设计直径。

过拟合椭圆圆心的水平线与拟合椭圆相交,由 式(10)可得到两个交点(x1,y0)、(x2,y0),交点间的距离,即拟合椭圆水平直径可表示为:

计算得到的拟合椭圆及其几何参数信息如图3所示,可以看出,利用RANSAC算法有效剔除了噪声点的影响,很好地拟合了隧道轮廓椭圆,可用于盾构隧道结构变形分析。
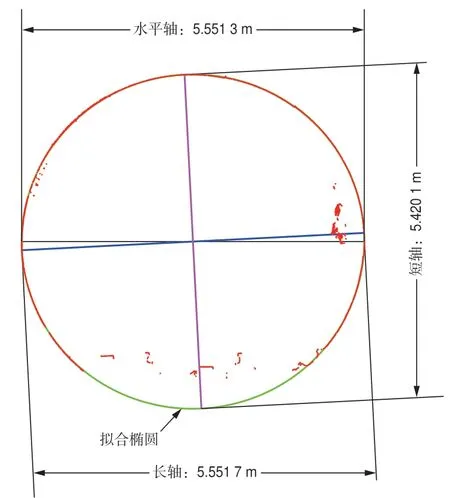
图3 断面椭圆拟合结果
3 案例研究
3.1 案例概况
根据运营监测资料的各区间累计沉降量成果 (图4),某地铁出段线区间2 a内累计下沉明显。现场巡视确认区间存在隧道变形、道床离缝、管片掉块与破损、管片渗透水等病害(图5),因此将出段线确认为本次维保区域。
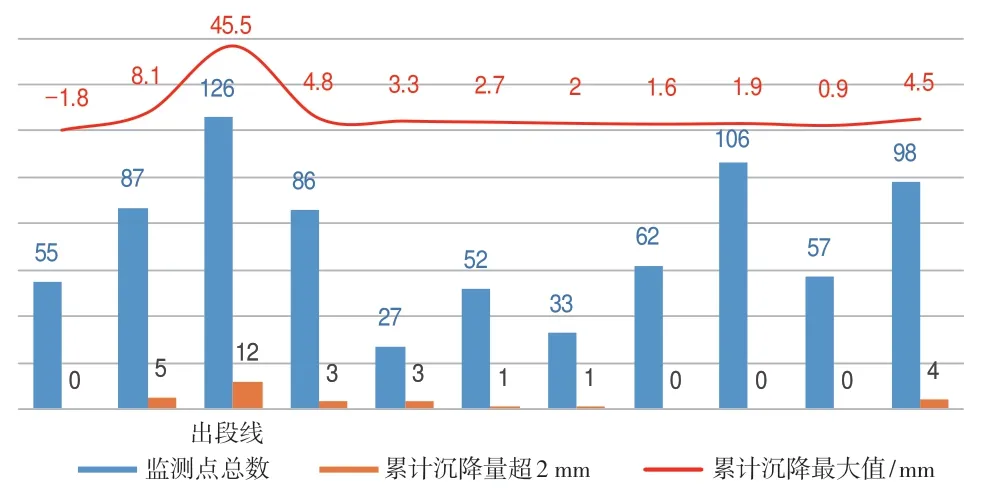
图4 各区间累计沉降量统计图

图5 出段线内管片病害现状
3.2 维保整治原则
根据现场情况,分情况制定病害处理原则:对道床离缝进行填缝处理;采取注浆止水或嵌填密封等方式及时封堵隧道渗漏水;对于破损管片,腰部以上的裸露钢筋采取涂料防腐处理,腰部以下的裸露钢筋采用环氧树脂砂浆进行修补;在沉降量明显区域,从洞内对隧道底部进行微扰动注浆;对隧道直径变形超 70 mm的管片采用地面微扰动注浆+钢环加固处理,对隧道直径变形超50 mm的管片进行地面微扰动注浆加固,以提高隧道两侧淤泥质土的地层抗力和地层参数。
3.3 移动三维激光扫描实施
为掌握维保区域结构的初始状态,2018年7月对该区间进行第一次移动三维激光扫描,区间长度约为600 m,人工推行速度为2 km/h,扫描环境如图6所示。以环片为单位,将点云进行逐环椭圆拟合,并计算椭圆长轴、短轴、偏转角、拟合水平直径、椭圆度,部分成果如表1所示。
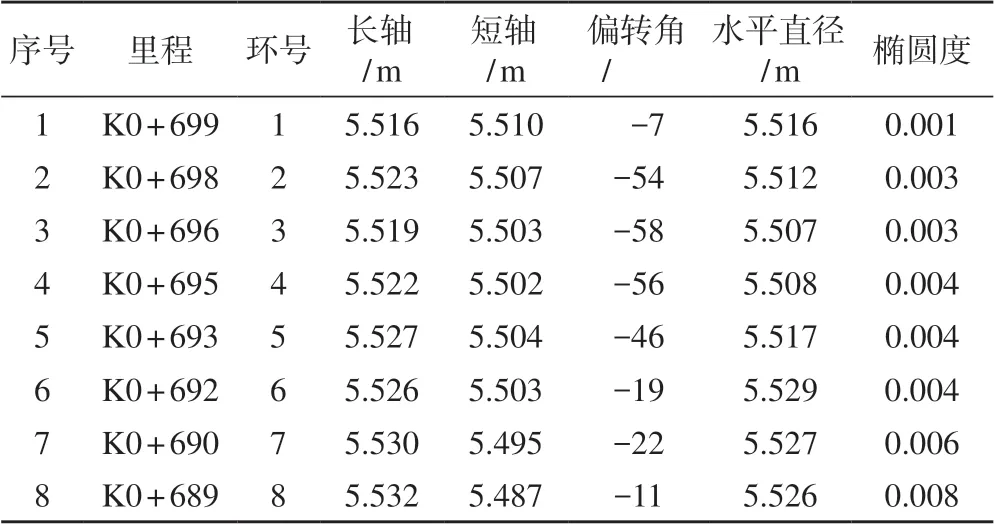
表1 维保区域椭圆拟合成果(部分)

图6 现场扫描图
针对维保整治中最关心的盾构管片水平直径问题,本文将拟合成果与标准管片直径(5.50 m)、微扰动注浆处理控制值(5.55 m)、微扰动注浆+钢环加固处理控制值(5.57 m)进行对比,结果如图7所示,可以看出,维保区域内隧道环片变形明显,根据维保整治原则,50环以上需进行病害处理。
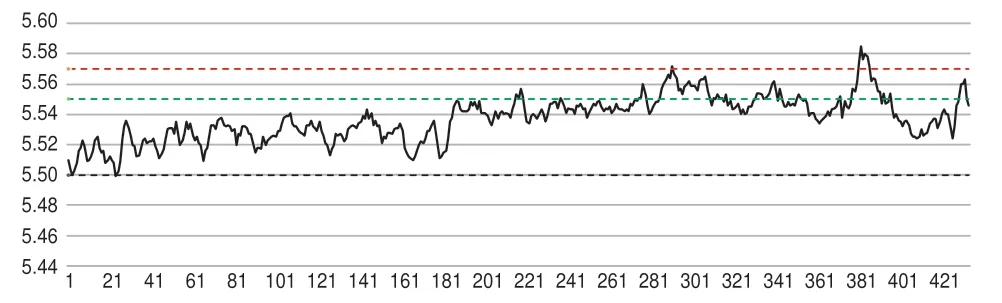
图7 整治前维保区域拟合水平直径/m
3.4 维保整治过程数据分析
在病害整治过程中,为了掌握隧道内部结构变化情况、协助调整治理方案、优化整治效果,又对维保区域进行了多次移动三维激光扫描,并将其拟合的水平直径与前期进行对比。
微扰动注浆完成后,对区间进行第二次移动三维激光扫描。将其拟合的水平直径与第一次成果进行对比发现,其环片水平直径虽有小幅外扩的现象,但整体保持稳定,在微扰动注浆范围,水平直径明显减小,说明微扰动注浆对隧道管片有明显的挤压作用。钢环加固完成后,对区间进行第三次移动三维激光扫描。将其拟合的水平直径与第二次成果进行对比发现,其环片水平直径仍有小幅增长,但整体保持稳定,微扰动注浆范围也保持稳定。至此,该区间整治工程全部结束。
在维保整治结束半年后,为了解区间内部结构现状和整治工程效果,对区间进行了第四次移动三维激光扫描,结果如图8所示。将其拟合的水平直径与第三次成果进行对比发现,其环片水平直径基本保持稳定,未见明显管片变形。通过本次工作,可认为采取地面微扰动注浆+钢环加固处理的方式控制隧道管片变形的效果良好,且移动三维激光扫描技术的速度和精度均能满足运营地铁盾构隧道病害整治的技术要求。

图8 整治结束半年后维保区域拟合水平直径/m(部分)
4 结 语
本文通过案例研究证明,移动三维激光扫描技术可在运营地铁盾构隧道病害整治中起到重要作用;其作业的成果有效反映了隧道病害的真实状态,多次扫描成果综合分析可得到病害在出现、发展、治理和维保过程中的隧道状态变化情况,从而解决运营地铁盾构隧道病害整治中遇到的问题。通过对移动三维激光扫描技术的应用实践发现,该技术在满足运营地铁监测天窗作业时间短的需求下,实现了相关必要信息的有效收集和处理,足以满足运营地铁盾构隧道病害整治的需求,适宜大规模推广。
猜你喜欢
数学杂志(2022年5期)2022-12-02 08:32:10
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26 07:43:38
城市建设理论研究(电子版)(2019年9期)2019-09-16 12:56:24
铁道建筑技术(2019年5期)2019-09-14 08:33:08
中学数学杂志(2019年1期)2019-04-03 00:35:42
福建中学数学(2016年4期)2016-10-19 05:09:02
中国房地产业(2016年9期)2016-03-01 01:26:36
工程建设与设计(2016年4期)2016-02-27 10:51:11
工程建设与设计(2016年4期)2016-02-27 10:51:09
中国质量与标准导报(2014年7期)2014-02-28 22:24:36
