
隧道移动三维扫描点云纠正的控制方案研究
2021-12-03 07:29:34杨红军王胜利
地理空间信息 2021年11期
杨红军,何 磊,魏 敏,王胜利
(1.江苏省地质测绘院,江苏 南京 211100;2.东南大学 土木工程学院,江苏 南京 211100)
传统测量方法和站式扫描仪在采集隧道内道路、墙壁、顶盖以及各种部件的三维坐标时,作业效率较低,难以满足在繁忙的隧道内开展空间信息采集的需求。移动三维扫描系统具有扫描速度快、采集信息全等特 点[1],能较好地克服隧道内车流量大、作业窗口时间短等因素的制约。为了解决隧道内GNSS连续失锁、移动三维扫描精度难以保证的问题,本文在隧道口及其周边建立GNSS网、导线和水准网来获取隧道内控制标靶的高精度三维坐标,并分析了在GNSS完全失锁的情况下,控制标靶布设方案对点云纠正精度的影响[2]。
1 研究背景与技术路线
1.1 研究背景
南京市某隧道扫描建模项目需获取可靠的三维数据进行地下空间综合开发利用的可行性研究,点位精度要求较高。该隧道是南京市主干道,位于高楼林立的城市中心,全长1.4 km,双向隧道间以及隧道两端通视困难。
1.2 技术路线
本文采用多平台激光雷达测量系统进行移动扫描,获取隧道内的点云数据;再利用控制测量方法采集隧道内的标靶坐标,用于点云纠正,并对纠正方案进行了分析。技术路线如图1所示。

图1 技术路线图
2 控制网布设解算
2.1 GNSS网测量
根据隧道周边实际踏勘情况,结合GNSS网观测对点位布设的要求,在隧道口共布设9个GNSS控制点,其中D6点布设在东隧道的支隧道入口处,其余 8个点成对布设在双向隧道的出入口处,网形结构如 图2所示。GNSS网外业采用5台Leica CS16接收机按照D级网要求进行观测,内业对同步环、异步环、重复基线进行检核,并对全网开展平差。解算小范围独立GNSS网可采用一点一方向平差方法[3],以网中一点坐标为起算点、一个方位角为起算方向进行二维平差,从而避免了起算点兼容性差对网结构的破坏,其内符合精度较高[4]。将联测的D18点NJCORS成果作为独立GNSS网假定的起算点,以D18到D11的方位角为起算方向开展平差。为了提高GNSS网中短边测量精度,对网中能直接观测的8条基线采用全站仪对向观测方法进行观测,并将观测得到的斜距加入控制网中进行改正。平差得到的最弱点为D2,其点位中误差为6.8 mm;对没有进行基线改正的边长进行分析,最弱边为D11-D17,其边长相对中误差为1/95 477,说明GNSS网内符合精度良好。

图2 隧道GNSS网结构图
本文将平差产生的9个GNSS点成果与NJCORS直接采集的点坐标进行比较,其中误差最大的点为D2,差值为0.032 m,该点距离起算点较远,符合采用一点一方向解算GNSS网误差分布的一般规律[5]。分析数据显示,8个较差中有7个分布在3 cm以内(表1),说明GNSS网与南京地方坐标系的连接精度 较高。

表1 GNSS网成果与NJCORS点坐标较差统计表
2.2 导线测量
隧道内双向车道中间有界墙阻隔,路面有绿化隔离带,导线只能沿道路布设,无法形成闭合导线。受观测条件限制,导线分为东西两条进行独立观测和解算[6],以东隧道导线为例,外业采用天宝S8全站仪按照一级导线要求进行观测。其网形如图3所示。

图3 东隧道导线网形图
本文选取D1、D2、D6、D9、D10共5个GNSS点作为导线起算点,观测7个测站,观测完成后进行平差计算,并对导线的精度进行评价。结果表明,导线网的最弱点为D7,其点位中误差为8.828 mm,最弱相邻点为D9-D8,其相对点位中误差为8.334 mm,导线全长相对闭合差为1/39 078。
2.3 水准测量
将清凉山隧道内和隧道口的导线点、GNSS点构成独立闭合环进行水准测量,共联测19个点,其中已知点1个、待测点18个。外业采用Leica DNA03按照四等水准测量要求进行观测,内业平差后高程网中的最弱点为D2,高程中误差为3.0 mm,最弱相邻点为D7-D6,相对点位中误差为1.778 mm。
3 点云获取与纠正
3.1 标靶布设
隧道内车流量大、交通繁忙、作业窗口时间短,因此标靶布设以快速高效、低成本为依据,优先选用隧道内分布均匀、特征明显的特征点作为控制标靶。利用隧道内道路标线,将A7纸张(74 mm×105 mm)大小的不干胶贴于隧道标线上,并约定纸张与标线北交叉处为标靶点位拾取位置。标靶和特征点如图4、5所示。

图4 隧道内的标靶

图5 隧道内的特征点
采用控制标靶对点云进行纠正时,为使点云精度分布均匀,将标靶成对布设在隧道内道路两侧。每条隧道均匀布设24对标靶点,每对标靶间隔50 m,隧道内道路宽度为10 m。标靶布设完成后,利用全站仪采集标靶点和特征点的三维坐标。
3.2 移动三维扫描数据解算
扫描完成后,下载基站数据和原始激光扫描数据,先利用Inertial Explorer软件进行POS解算,再利用CoPre软件解算得到las格式的点云数据。为直接解算得到地方坐标系的点云数据,在CoPre软件解算点云前,利用其坐标转换工具完成大地坐标到投影坐标的参数解算。采用GNSS网成果中均匀分布的5个点解算七参数,采用高斯投影方式、中央子午线118e50′, 东偏移量和北偏移量按地方坐标系指定参数解算,并对坐标转换残差进行分析。
如表2所示,坐标转换的残差最大值为0.221 mm,说明上述参数计算是正确可靠的。为了直观验证七参数的转换精度,将GNSS网成果中没有用于参数计算的4个点通过该参数进行解算,并将大地坐标解算为投影坐标,再与GNSS网成果表中的点位进行比较。

表2 坐标转换残差表/mm
如表3所示,坐标转换后的平面较差最大值为0.024 m,高程较差最大值为0.024 m,能直观验证该转换参数的精度。将解算的七参数保存为tp格式的文件,在CoPre解算点云时加载该文件;再通过POS解算的WGS84坐标和转换参数直接解算得到地方坐标系的点云成果。

表3 参数验证点位较差表/m
3.3 点云精度预判
对解算的点云数据进行精度分析和质量评定对成果的应用至关重要[7]。本文在利用Inertial Explorer软件进行POS解算时,选取IE正反解较差关键指标进行点云精度预分析,横坐标GPS时间轴330400~330570 为移动三维扫描系统进入东隧道内完全丢失卫星信号的阶段,如图6所示,红色为东西向误差,绿色为南北向误差,蓝色为高程误差。通过上述指标可初步判断,该路段点云精度较差,尤其是高程误差较大。

图6 Inertial Explorer IE正反解较差图
3.4 点云纠正
CoPre软件直接通过GNSS网和惯导解算点云,由于隧道内GNSS连续失锁,因此其精度较差。利用控制标靶对点云进行纠正时,标靶密度越大,对点云的纠正效果越好[7],但标靶的密度越高,布设、观测标靶的时间就越长,与隧道内较短的作业时间窗口形成矛盾,因此针对不同精度需求,选择合适的控制标靶布设方案具有重要的现实意义[8]。为准确描述GNSS完全失锁时控制标靶布设方案对点云纠正精度的影响,本文将东隧道布设的24对标靶进行分类,将北边第一组标靶定义为控制标靶,第二组定义为检查标靶,以奇偶间隔的形式向南递推定义标靶,形成隧道内每 100 m间隔一对控制标靶、每100 m间隔一对检查标靶的点云纠正控制方案。在此基础上,依次递减控制标靶数量,检查标靶位置和个数不变,如图7所示,三角形为控制标靶,圆形为检查标靶,制定出200 m、300 m、400 m、600 m控制标靶间距的精度验证方案。
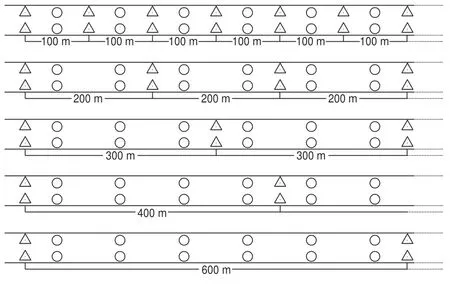
图7 控制标靶布设方案图
按照上述控制标靶布设方案,本文利用CoRefine软件依次纠正原始点云数据,纠正过程采用三维约束控制模式。纠正后对检查点进行精度检查,并对不同控制标靶布设方案进行对比分析,结果如表4所示,可以看出,控制标靶间距为100 m时,纠正后点云能达到5 cm左右的点位误差,满足了隧道高精度建模的需要。针对隧道不同数据采集的精度需求,参照 表4选择合适的标靶布设方案,能提高效率、节省时间、降低劳动强度,对拓展移动三维扫描的应用领域具有重要的现实意义[9]。

表4 控制标靶间距与点云精度相关性分析表/m
4 结 语
1)在隧道内使用移动三维扫描系统,较之于使用站式扫描仪具有扫描速度快、无需测站拼接、降低劳动强度等优势,能较好地克服隧道内车流量大、作业窗口时间短等客观条件的制约。
2)在小范围工程测量GNSS网中,为提高内符合精度,可以网中一点坐标为起算点、一个方位角为起算方向进行二维约束平差。起算数据假定为CORS直接采集的点坐标成果,并通过CORS点坐标与GNSS网平差成果的比较,证明独立网的挂接精度可靠。
3)参考控制标靶间距与点云精度相关性分析成果,设计合理的控制标靶布设方案,在满足精度需求的同时,能最大限度地减少工作量。为达到更好的精度预测效果,还需更多的样本数据,并开展更深入的研究。
猜你喜欢
装备制造技术(2021年4期)2021-08-05 07:40:24
纺织科学研究(2021年1期)2021-03-19 05:18:14
电子测试(2018年23期)2018-12-29 11:12:02
制造技术与机床(2018年12期)2018-12-23 02:41:18
测绘工程(2018年3期)2018-03-20 03:05:12
电线电缆(2017年4期)2017-07-25 07:49:46
测绘科学与工程(2016年4期)2016-04-17 06:51:08
测绘学报(2015年4期)2015-01-14 03:01:28
河南科技(2014年10期)2014-02-27 14:09:19
大地测量与地球动力学(2014年3期)2014-02-13 05:44:02
