基于Fuzzy- PID 双模复合控制器的吸收式热泵控制策略的优化
2021-12-02 08:19赵星凯靳赵钰杨东润刘忠晨
科学技术创新 2021年32期
赵星凯 靳赵钰 杨东润 张 迎 孙 梅 刘忠晨
(山东建筑大学,山东 济南 250000)
1 概述
2020 年9 月22 日,第75 届联合国大会上中国提出将力争于2030 年前实现碳达峰、2060 年前实现碳中和的目标。低碳、高能源利用率逐渐成为研究热点问题。吸收式热泵是一种利用低品位热源,实现将热量从低温热源向高温热源泵送的系统,但其具有稳定性差、易受天气情况影响等缺点。在系统开始运行到趋于稳定这段时间,受管道内温度改变和压力变化的影响,吸收器罐和发生器罐两边的流量易发生波动,产生流量差,致使吸收器罐和发生器罐可能产生满溢的情况,甚至发生危险。本文针对这种情况,设计一种基于改进的模糊PID 双模复合控制器,通过控制电子膨胀阀的开度,来实时控制各种温度、压力变化下通道内的流量,从而实现了对吸收式热泵控制策略的优化。
2 系统分析
吸收式热泵是一种利用低品位热源,实现将热量从低温热源向高温热源泵送的系统,继续改进吸收式热泵是国家实现碳中和、碳达峰目标的有力手段。吸收式热泵系统组成为:吸收器、溶液循环泵、质量流量计1,2,3、热回收换热器、发生器、冷凝器、电子膨胀阀1、2(EEv1、2)、蒸发器等主要部件。
其工作原理为自吸收器出来的低温DMF 溶液在溶液循环泵的控制下进入热交换器进行换热,后进入发生器板换,温度持续升高。进入发生器后DMF 溶液中的R134a 蒸发,与溶液分离进入冷凝器,剩余的DMF 溶液进入热交换器后经吸收器风冷机进入吸收器,温度持续降低;进入冷凝器后的R134a 蒸汽在风冷作用下降温液化成R134s 溶液后,经EEV1 进入板式蒸发器,吸收热量后蒸发,最终进入吸收器罐与气态DMF 溶液结合,至此结束循环。吸收式热泵系统原理图如图1。
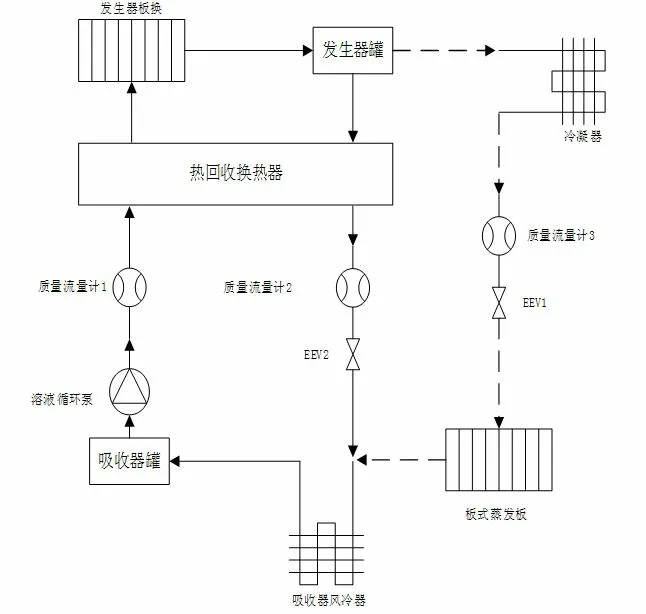
图1 吸收式热泵系统原理图
但在实际操作中,系统开始运行到趋于稳定这段时间,受管道内外温度改变和压力变化的影响,吸收器罐和发生器罐两边的流量易发生上下浮动,产生流量差,致使吸收器罐或发生器罐可能产生满溢的情况,甚至发生危险。利用传统的PID 控制无法应对实时变化的各种干扰,其缺乏自适应能力的缺点被放大,因此在实操中可能需要专人注意液位变化以避免发生危险。基于此,笔者将陈猛等人提出的将模糊PID 双模复合控制器的方法改进后应用到本系统对液位的控制中。对比质量流量计1的流量和质量流量计2、3 的流量和的差值为系统输入信号E,并将差值求导后作为模糊控制器的另一个输入Ec。
3 模糊控制器的设计
根据热泵系统实际情况,模糊控制器采用两输入一输出的二维控制。模糊模块输入分别为误差E 和误差变化率Ec。设定误差E 和误差变化率Ec的模糊论语均为[-3,3],7 个量化语言集合为{PB(正大),PM(正中)、PS(正小)、Z(零)、NS(负小)、NM(负中)、NB(负大)}。为了便于工程的实现,其二者的隶属度函数均采用三角形函数。
模糊控制器的输出变量Uf为电子膨胀阀EEV2 的开度,并设定其模糊论域为[-3,3]。7 个量化语言集合为{PB(正大),PM(正中)、PS(正小)、Z(零)、NS(负小)、NM(负中)、NB(负大)}。为了便于工程的实现,Uf的隶属度函数也采用三角形函数。
模糊控制器的规则规定着模糊控制器的控制效果,其规则库的制定是根据大量的实践操作或专家根据经验反复调试、推敲得出的。模糊规则如表1 所示。

表1 模糊控制规则
4 模糊PID 双模复合控制器
模糊控制属于非线性控制,是智能控制算法的一类。根据大量实验总结经验作为模糊规则的制定原则,对实际控制有良好的效果。但是,模糊控制由于存在取整运算这一环节,所以在控制精度方面可能有所欠缺,可以看做缺少积分作用的PD 控制器,可能会引起系统产生稳态误差。将PID 算法与Fuzzy 算法结合,可以综合双方的优点,组成一种模糊PID 复合控制系统。陈猛等人提出了一种的模糊PID 双模复合控制器解决了控制器切换过程中出现的抖动问题,笔者在此基础上进行了改进,对两个控制器的配比关系通过函数进行调节,解决了原复合控制器过度控制的情况。
在流量设定值与实际流量反馈值相差较大时通过Fuzzy 模块迅速控制,当相差较小时,为提高控制精度使用PID 模块控制。并通过函数控制,根据差值的大小分配给两个控制模块不同的输出配比,既能迅速对误差信号进行响应,又能对微小误差精准消除。复合控制器结构如图2 所示。

图2 改进的模糊PID 双模复合控制器结构
流量设定值R(t)与系统实际流量Y(t)的差值E 及其导数Ec均输入到模糊模块进行决策判断,偏差E 单独输入PID 控制器,两个控制器分别运行并输出控制信号。根据模糊模块输出值的大小调整PID 控制器的系数α 的大小,通过改变α 和γ的值调整模糊控制器和PID 控制器的输出在总输出信号中的比例。
模糊模块首先对输出进行归一操作,将输出比例缩小到[-1,1]的范围内,取绝对值后在α 函数和γ 函数的作用下,对两个模块的输出进行配比。为消除复合控制器过度控制的情况,在复合控制的基础上增加限制条件,令α +γ =1,成功解决这种误差状态,使α 和γ 能够平滑的实现两个切换和输出配比。
模糊PID 双模控制的输出形式如下述公式所示:

上式中,α 和γ 的值是以模糊模块的输出为基础的。当系统实际过热度与设定值相差较大时模糊模块在模糊规则的判断下,会输出一个较大的校正值,相应的α 就会变小γ 变大,此时复合控制器中模糊模块输出的比重就变大了,输出主要取决于模糊控制器;反之,则输出主要取决于PID 模块。
5 Matlab 仿真及效果对比
在Simulink 仿真软件中分别建立Fuzzy-PID 复合控制器以及传统PID 控制的模型,Fuzzy-PID 复合控制器见图3。随机变化的流量致使液位发生随机的变化,模糊控制器根据系统中质量流量计的差值E 和Ec进入模糊控制器,误差E 单独进入PID 控制器两部分成比例求和后输出电子膨胀阀的开度控制信号,实现控制器控制效果的优化。其控制效果如图4,由图可知,改进后的模糊PID 双模复合控制器较传统PID 控制器有更快的响应速度且超调更小,具有更优的控制效果。应用于本系统中后,应对随机时变的流量变化,能够更快速且平滑的控制电子膨胀阀的开度,从而平滑快速的控制液位。在实验开始到系统平衡的这段时间,能够有效控制吸收器罐和发生器罐的液位,保证系统能够稳定运行。其仿真效果如图4 所示。

图3 双模复合控制器Simulink 仿真模型
图4 中,实线为模拟液位控制系统给定信号, 点状线为传统PID 控制器的控制效果曲线,虚线为改进后的模糊PID 双模复合控制器的控制效果曲线。
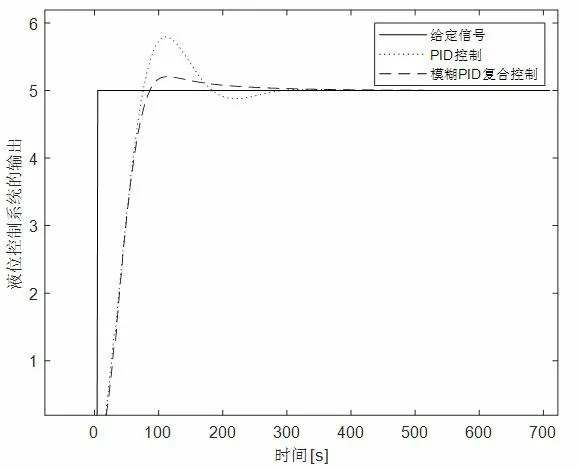
图4 模糊PID 双模复合控制器与传统PID 控制器的控制效果图
6 结论
本文将模糊PID 双模复合控制器应用到吸收式热泵系统中,并对原双模复合控制器中模糊控制器和PID 控制器同时控制时易出现过度控制的情况进行了改进。该控制器具有结构简单,易于工程实现,且解决了两个控制器切换时的抖动问题,对比原复合控制器与传统PID 控制器,改进后的双模复合控制器在控制效果仿真曲线上有更优的控制效果。
猜你喜欢
农业工程学报(2022年8期)2022-08-08
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
煤气与热力(2022年4期)2022-05-23
节能与环保(2022年3期)2022-04-26
载人航天(2021年5期)2021-11-20
科技视界(2020年17期)2020-07-30
网络空间安全(2019年8期)2019-03-18
科技与创新(2018年19期)2018-11-30
科技与创新(2015年2期)2015-02-11