基于Yolov5的交通路面障碍物目标检测
2021-12-01 08:58杨晓玲罗顺利梁皓添
智能城市 2021年20期
杨晓玲 罗顺利 梁皓添
(珠海科技学院电子信息工程学院,广东珠海 519041)
随着社会经济的快速发展,越来越多的家庭拥有私家车,如何减少交通意外的发生和实现无人驾驶成为新问题。辅助系统的出现成为解决问题的关键技术,是高精度识别交通路面障碍物的一个重要组成部分。目前解决此问题的方法是通过汽车的摄影机拍摄现场照片,再对原始照片进行处理与模拟训练等,对照片中的交通障碍物进行框选与监测。现实的交通环境变化多样,传统技术通常使用手工和滑动窗口相结合的设计对交通障碍物进行识别检测,精度和实时性难以满足驾驶员的安全需求。随着人工智能的发展,卷积神经网络和深度学习算法的发展为交通技术提供了新的可能。
1 Yolov5介绍
1.1 Yolov5网络模型介绍
YOLOV5模型包括Input、Neck、Backbone和Prediction四个部分。
Yolov5网络模型如图1所示。
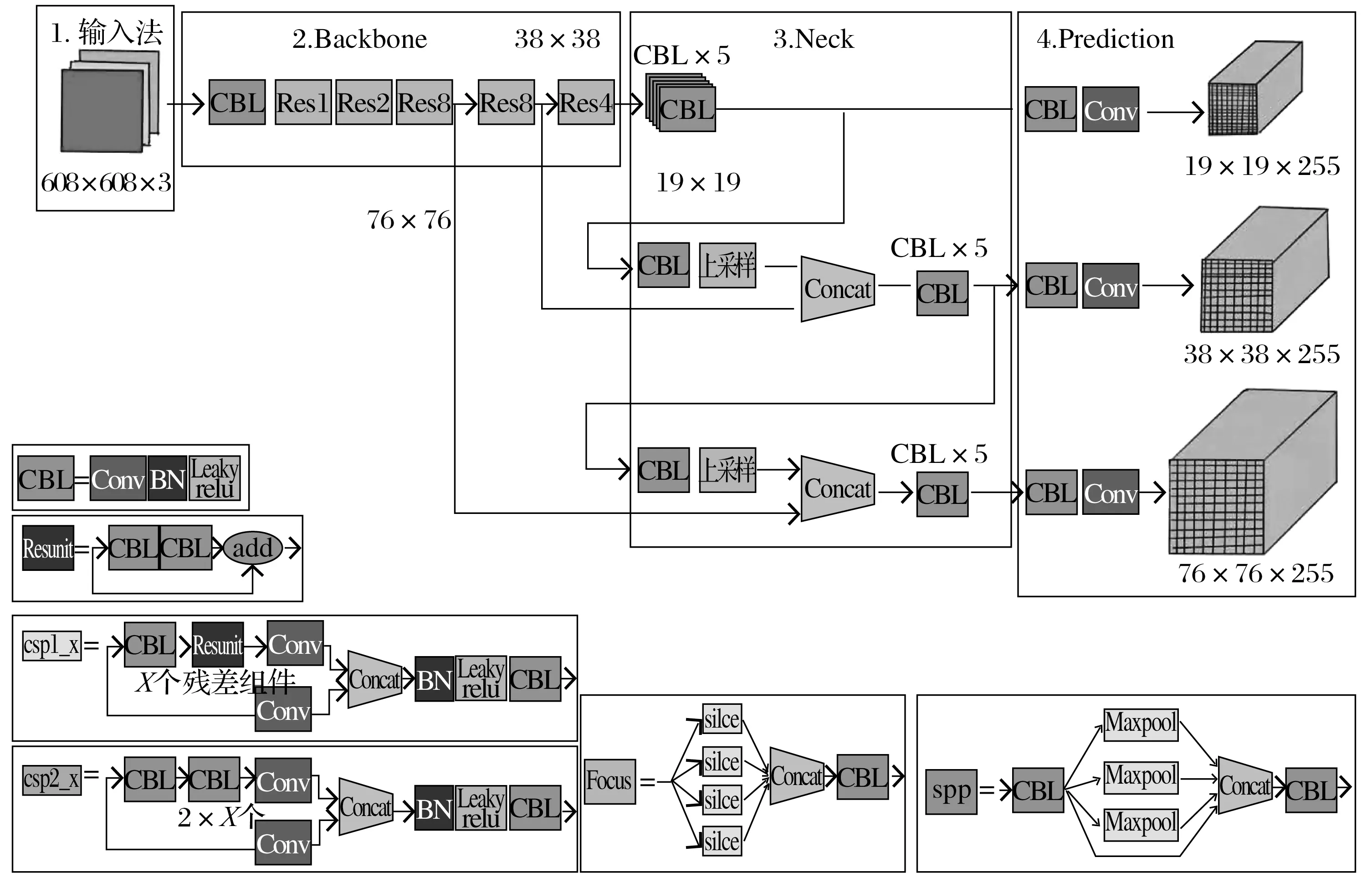
图1 YOLOV5结构
1.2 Input端
Input端包括Mosaic数据增强、图片尺寸处理、自适应锚框计算三部分。
Yolov算法中需要将输入图像的尺寸变换为固定大小,再送入检测模型中训练。
网络训练前需要设定初始锚框,Yolov5设定的初始锚框为[116,90,156,198,373,326][30,61,62,45,59,119][10,13,16,30,33,23]。
Yolov5网络模型在基础的锚框上进行模拟得到预测框,如果所得预测框计算与实际相差过大,可以改变代码将自动锚功能关闭。如果效果较好,可与真实框比较,依据差值反向更新调整网络模型参数。
1.3 Backbone
Yolov4的Backbone只有CSP结构,Yolov5新增了Focus结构。在新增操作的Foucs操作中,切片操作非常重要,其过程是逐步变化的。
比如在Foucs结构中加入原始图像608×608×3,通过切边操作将原始图像变为304×304×12的特征图,输出304×304×32的特征图。
1.4 Neck
Neck的结构是FPN(自上而下)+PAN(自底向上结构的特征金字塔)结构,FPN结构采用上采样方法进传递信息和融合信息,获取预测的结果图。
1.5 Prediction
Prediction由非极大值抑制(NMS)和Bounding box损失函数两大部分组成。
在Bounding box中,GIOU_Loss函数作为损失函数,通过NMS函数可以在预测结果处理阶段解决重合目标边框或进行筛选。
2 影响因素
雨雪天气时,摄影照片的清晰度受到影响,大幅度降低安全驾驶要求的准确性。
利用Yolov5算法可以在环境变化中提高预处理照片的准确性和实时性,通过labelimg标注使最后得到的预测结果更有效及合理。对于种类模糊的可以进行二次排查,提高试验结果的准确性。
3 训练样本集设计
3.1 训练样本集的重要性
道路障碍物样本集是目标检测的关键因素,样本集的可靠性对于训练后模型的质量具有重要的影响。样本集多样性、覆盖面足够,训练后的模型质量也能够满足相关要求。
3.2 样本的来源及标注
从线上收集10 000张路面障碍物的图片,组合训练集和测试集,训练集和测试集比例为1∶7,即1 250张∶8 750张,样本集中obstacle表示有障碍物,通过labelimg软件对路面障碍物进行标注。
部分样本集如图2所示。
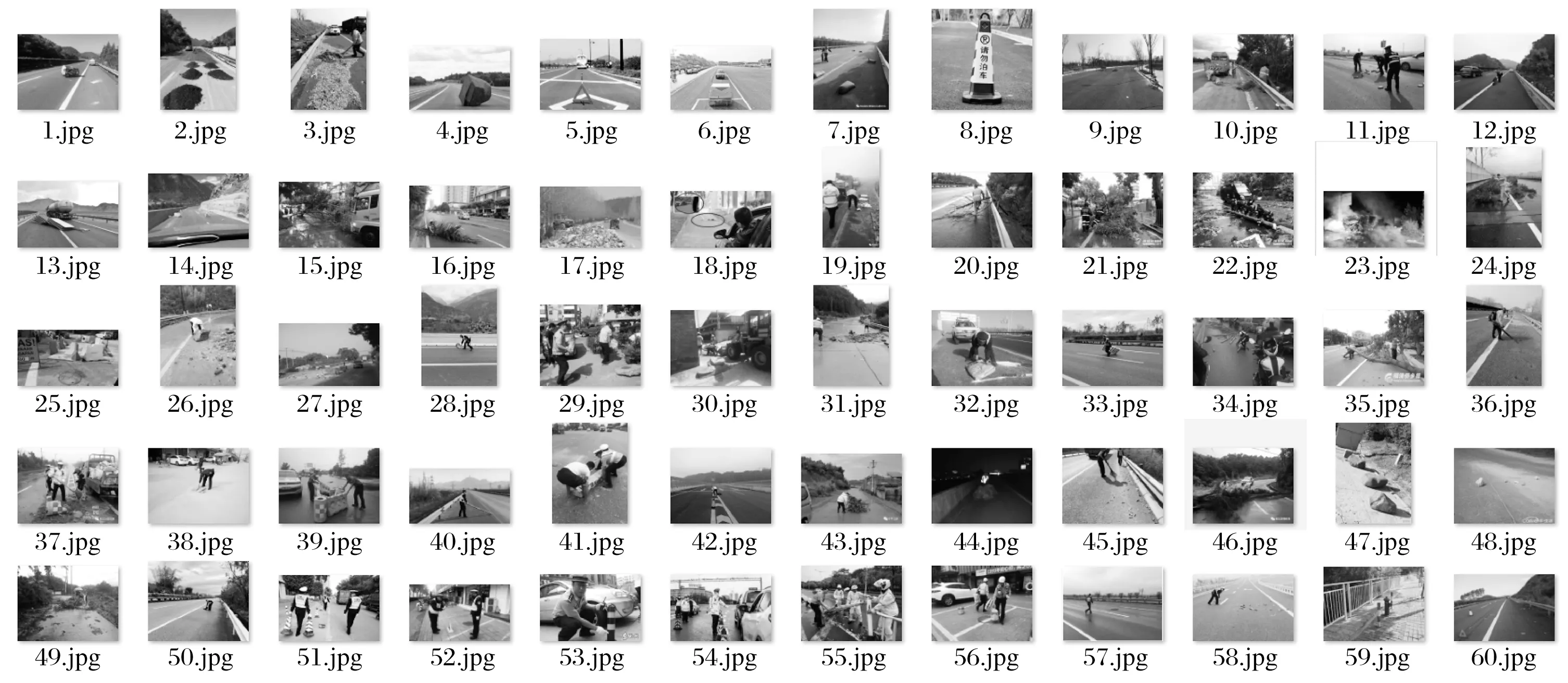
图2 部分样本集展示
障碍物标注情况如图3所示。

图3 路面障碍的标注
3.3 样本的预处理
样本的预处理是路面障碍检测的重要环节,图片通过摄像头采集或人为拍摄,本身会受到摄像头镜头不清晰、影像传输以及人手抖动等问题影响。
检测前应对所有图片进行预处理,通过预处理过滤无用信息,提升训练集的质量。
4 试验与讨论
4.1 试验算法与过程
试验流程如图4所示。

图4 试验流程
进行目标识别检测时,首先输入样本图片,通过Yolov5算法,采用labelimg软件对目标障碍物进行框选,开始训练,得到需要的数据集。与对应的数据进行对比,选择准确度更高的图片输出,基于Yolov5算法对交通路面障碍物进行检测,验证其准确性和实时性。
4.2 试验结果及其分析
城市道路试验、盲人道试验如图5、图6所示。

图5 城市道路试验结果

图6 城市盲人道试验结果
使用Yolov5算法模型进行训练,通过改进损失函数,采用DIoU损失函数替代GIoU损失函数。由试验结果可知,采用这种方法可以更准确和迅速标注交通障碍物。Yolov5算法相较于Yolov4,具有更高的实时性和准确性。更换使用损失函数后,结果更明显,是否进一步改进其他系数还需要其他试验深入分析。
5 结语
综上所述,本文提出的交通路面障碍物识别检测是基于改进Yolov5的检测算法,用于交通驾驶路面检测,主要数据源于交通路面视频,通过改进的DIoU、labelimg等方法改进Yolov5计算网络,将其应用于车辆,以满足驾驶员对于安全驾驶的需求和无人驾驶技术的巩固,降低事故概率。
猜你喜欢
童话世界(2020年32期)2020-12-25
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
疯狂英语·新悦读(2019年11期)2019-12-18
小学生导刊(2018年16期)2018-07-02
专用汽车(2015年4期)2015-03-01
浙江大学学报(工学版)(2015年1期)2015-03-01
筑路机械与施工机械化(2014年2期)2014-03-01
城市道桥与防洪(2014年5期)2014-02-27
中学英语之友·上(2008年1期)2008-03-20