
基于myRIO 的主动激励触觉传感器特性实验系统设计
2021-12-01 05:26张英俊吴红梅杨兴梅马晓璇杨雪梅王民慧
智能计算机与应用 2021年8期
张英俊,吴红梅,杨兴梅,马晓璇,段 芳,杨雪梅,王民慧
(贵州大学 电气工程学院,贵阳 550025)
0 引言
随着科技的进步和工业化的飞速发展,机器人技术已应用于大规模的工业生产中,在高危作业环境下更是起到了重要作用。机械手是机器人的重要部件,能否准确抓取物体取决于传感器性能的优劣和电路结构的优化。
此前,国内外诸多专业人员对传感器设计与特性测试等性能的优化做了一系列的研究。文献[1-2]中的研究结果表明:一方面,传感器的制作材料、周围环境等都会对传感器的精度有所影响;另一方面,不同的信号采集方式和电路连接的不同,也会导致所获取的数据有所不同[1-2]。文献[3]中提到对激励与采集信号并行式结构的主动激励式触觉传感器相关技术开展了研究,验证了主动激励式触觉传感器的可行性和有效性。为进一步优化传感器结构,本设计采用激励与采集叠加式结构的主动激励触觉传感器,基于myRIO 对其采集数据展开研究并进行验证。
1 设计方案
触觉传感器类型众多,由于驻极体麦克风体积小、结构简单、电声性能好、价格低廉、应用广泛等特点,该设计选择使用驻极体麦克风作为传感器。扫频实验通过示波器发出扫频信号对机械手进行激励,根据香农定理设置合理的采样频率、采样时间激励机械手;对采集的数据进行分析处理,验证激励与采集叠加式结构主动激励触觉传感器的可行性[4]。
当机械臂受到扫频信号作用时,其振动信号发生变化,安装在机械手上的驻极体麦克风将振动信号转换成电信号,经放大器放大后采集至上位机,获取机械手空载状态下的频率变化。其电路原理如图1 所示。

图1 扫频电路原理框图Fig.1 Block diagram of frequency sweep circuit
为实现激励与采集叠加式结构,在机械臂上安装压力传感器,当锤击压力传感器时,传感器将力的大小经过线性电压转换器转换为电信号并反馈到上位机上。电路原理如图2 所示。

图2 锤击电路原理框图Fig.2 Block diagram of hammering circuit
2 传感器设计及特性分析
2.1 压力传感器模块
在机械臂夹取物体时,与物体之间有相互的作用力,本设计选取FSR402 RP-C18.3-LT 型号薄膜压力传感器,该传感器为力感柔性传感器,其工作原理是采用电阻反馈压力的大小,给传感器施加的压力越大,其阻值越小,压力越小其阻值越大[5]。因为薄膜压力传感器不具备将压力信号转换成电信号的能力,所以还需要在薄膜压力传感器后端接入电阻-电压转换器,将压力信号转换为可处理的电信号,通过myRIO 收集至上位机[6]。
2.2 驻极体麦克风降噪放大模块
驻极体麦克风基本结构由单面涂有金属的驻极体薄膜和有若干小孔的金属电极构成,其驻极体面与背电极相对构成平板电容器。当机械臂的振动发生变化时,振动变化引起驻极体薄膜产生位移,改变电容两极板的间距,从而引起电容容量变化。根据Q =CU公式,驻极体电荷数量保持不变,电容发生变化时电压也随之变化,从而实现声-电的转换。
将驻极体麦克风输出的电信号输入降噪放大模块中,调节降噪放大模块的放大倍数,至其在示波器上显示为3v。将经过降噪放大处理后的电信号采集至myRIO,上传到上位机。
2.3 LabVIEW 程序设计及数据采集
本设计结合使用了LabVIEW 和MATLAB 软件。其中,利用LabVIEW 软件对数据进行采集和保存,再利用MATLAB 软件对采集到的数据进行分析处理。
LabVIEW 是由美国国家仪器(NI)公司研发的一种程序开发环境,与其它计算机语言的显著区别是:其它计算机语言采用基于文本的语言产生代码,而LabVIEW 使用的是图形化编辑语言,产生的程序是框图形式[7]。
图3 所示为LabVIEW 程序图示。程序主要由读取U 盘信息、循环采集系统、实时显示、数据保存等几部分组成。其中读取U 盘信息模块可以将U盘的内存大小、U 盘包含的内容读取到前面板显示;循环采集系统模块实现数据采集,可在此模块设置采样时间并且可以选择myRIO 上信号输入端口。为了实时了解所采集的信号,并防止在数据采集过程中出现明显的错误,采用了波形图和波形表,对信号进行实时显示。最后,通过生成阵列形式将数据保存为EXCEL 文件,保存到U 盘中[8]。

图3 LabVIEW 程序Fig.3 LabVIEW program
3 数据采集及分析
本次设计采用myRIO 与LabVIEW 软件相结合来对数据进行采集。采集分为锤击实验数据采集与扫频实验数据采集。为满足香农定理(信道信息传送速率的上限(比特每秒)和信道信噪比及带宽的关系),以及不超过myRIO 采样率极限的同时,设置了合理的采样率,采样率越高则分辨率越高[9]。
实验采用MATLAB 软件对所采集到的数据进行分析处理。MATLAB 作为一种非常简便、智能的高级程序语言,在科学研究、工程等领域得到了非常广泛的应用。在信号处理系统应用MATLAB,可以保证信号处理工作的顺利开展,且能够使信号处理的稳定性、效率更高[10]。
傅里叶变换是将按时间或空间采样的信号与按频率采样的相同信号进行关联的数学公式。在信号处理中,傅里叶变换可以揭示信号的重要特征(即其频率分量)。
对于包含n个均匀采样点的向量x,其傅里叶变换定义为:
式中;w =e-2πi/n是n个复单位根之一,其中i是虚数单位。对于x和y、索引j和k的范围为0~n-1。
FFT 是离散傅里叶变换的快速算法,可以将一个信号变换到频域。有些信号在时域上很难看出特征,但变换到频域之后,则很容易看出。所以在这里采用了快速傅里叶变换对实验数据进行分析。
3.1 锤击信号
图4 为锤击实验数据的时域图,可明显看出该传感器的灵敏度高、性能好,能很快恢复到平稳状态。由图5 的频域图可以看出,两次作用力得到的频谱基本一致,证明了该压力传感器性能稳定。
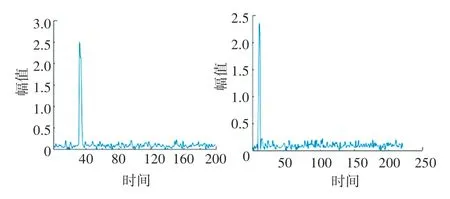
图4 锤击信号时域图Fig.4 Hammering signal time domain diagram
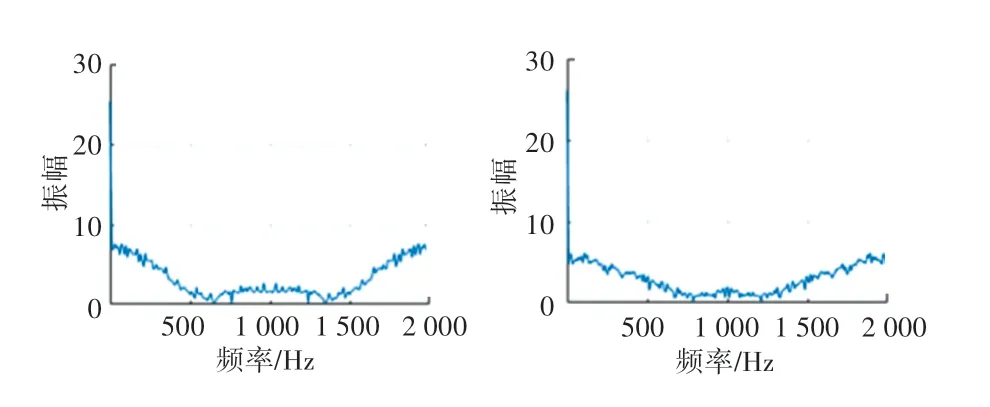
图5 锤击信号频域图Fig.5 Hammering signal frequency domain diagram
3.2 扫频实验分析
图6 所示为扫描频率相同,扫频时长分别为30 s、40 s、60 s 的3 组实验的频谱图。由图6 可得:60 s扫频得到的频谱趋势最好,30 s 扫频得到的频谱趋势最差。即扫频时长越长,频谱越好。为达到良好的效果,实验选用了扫频时间为60 s 的扫频数据,作为最终分析。
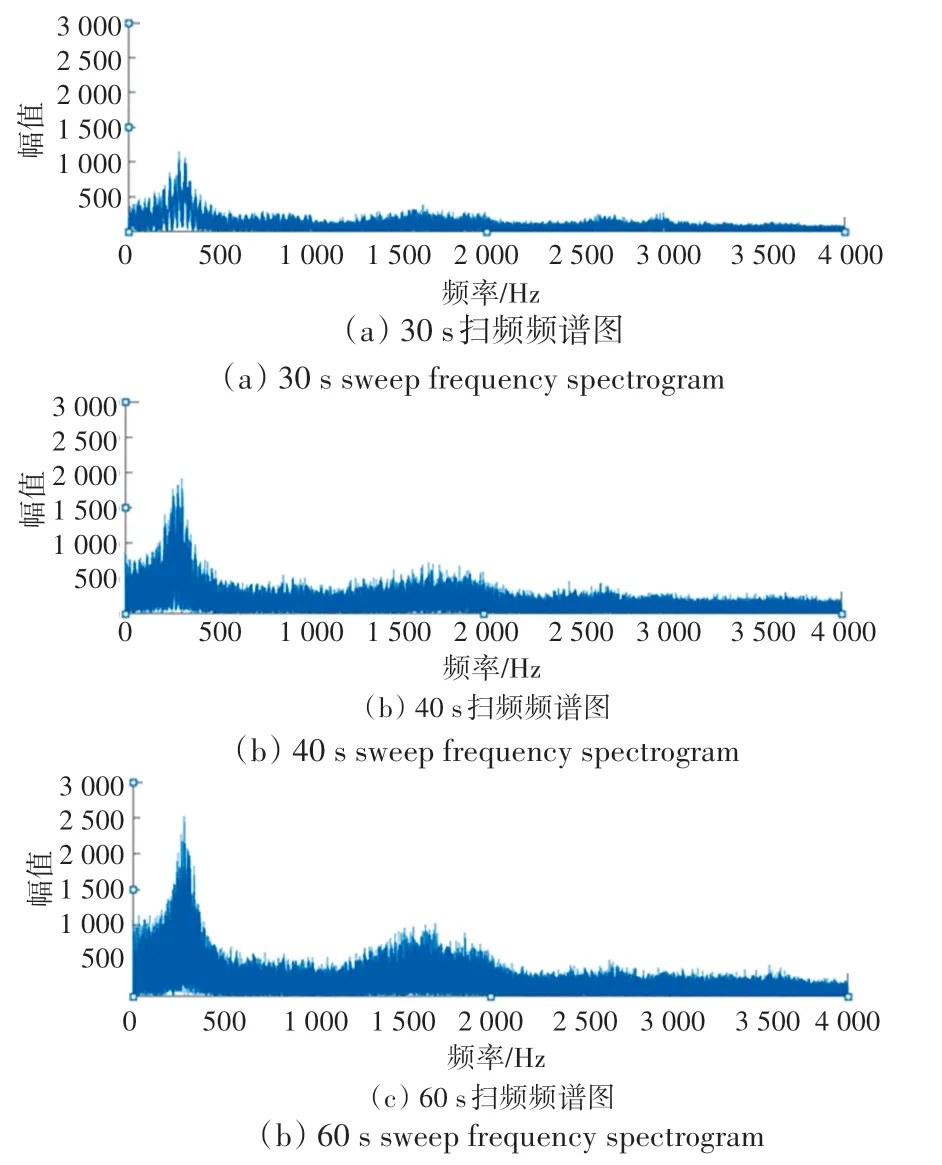
图6 不同时长的扫频频谱图Fig.6 Sweep frequency spectrograms of different durations
图7 所示的两张频谱图为扫频时间均为60 s,而扫频频率不同,得到的两张频谱图。由图可看出,10~1 000 Hz 扫频频率分量大概在290 Hz 附近出现峰值,10~3 000 Hz 扫频频率分量在1 660 Hz 附近出现峰值,则这两个峰值频率为该系统的特征频率。
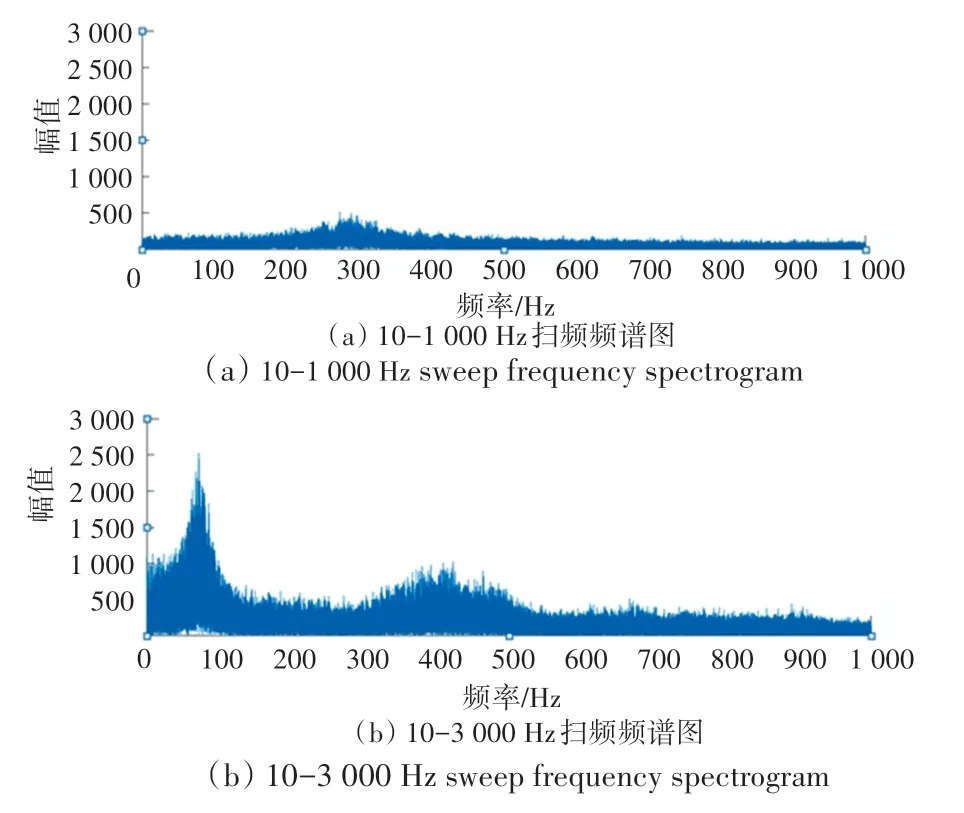
图7 60 s 扫频频谱图Fig.7 60 s sweep frequency spectrogram
3.3 抓取实验分析
图8 所示分别为抓取砝码、苹果的时域、频域图。由图8 可以看出,抓取苹果时特征频率在100 Hz附近,而抓取砝码时在660 Hz 附近。对比可看出,在抓取不同物体和空载时的特征频率有明显变化。
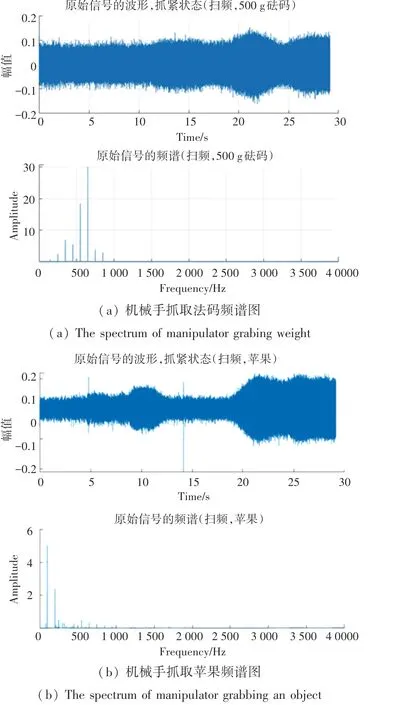
图8 机械手抓取物体频谱图Fig.8 The spectrum of Manipulator grabbing an object
4 结束语
本次设计通过比较机械臂空载特征频率和抓取物体的特征频率不同,来判断激励与采集叠加式结构的主动激励触觉传感器的可行性。在声音信号的频域处理中,快速傅里叶变换之后得到的频谱谱线值几乎都为0。为了得到较好的谱分析,对于任意一组数据序列都应先消除直流分量和趋势项。机械手抓取物体时,机械手和物体构成新的系统,当振动特征频率发生变化时,证明机械手抓紧了物体,且不同系统的振动频率特征不一样,也说明了激励与采集叠加式结构的主动激励触觉传感器可以采集到机械手不同状态的振动频率,为机器手抓取物体提供了一种新的采集方式。
猜你喜欢
农机使用与维修(2022年7期)2022-07-14
海外星云(2021年6期)2021-10-14
机电工程技术(2021年3期)2021-09-10
科学大众·小诺贝尔(2020年4期)2020-07-20
环球时报(2019-07-18)2019-07-18
通信产业报(2018年29期)2018-11-24
现代职业教育·中职中专(2018年7期)2018-05-14
通信产业报(2018年40期)2018-01-22
红豆(2017年4期)2017-04-13
移动通信(2017年3期)2017-03-13
