自平衡运输车
2021-11-30 08:01:37边佳慧葛付婷徐宇
科学与生活 2021年2期
边佳慧 葛付婷 徐宇



摘要:该运输车主要由主控系统、载货平台升降机构、夹持货物机构、行走机构、检测模块等组成。设计采用STM32F103作为主控核心,载货平台始终保持与地面平行。通过陀螺仪传感器读取角度,GPS定位装置、图像传输功能以及光电开关,可以自主行走并躲避障碍以及准确定位。该设计有效解决了多地形搬运物品的问题,有效的提高了搬运的效率、货物的安全以及大大节省了人力。经过实际测试证明该运输车具有很好的搬运效率,能够很好的工作模拟。
关键词:陀螺仪;GPS定位装置;运输车;多地形
引言
随着科技的发展,机器人代替了人进行劳动,从而大大的解放了劳动力,但是在室内外货物的搬运依旧还是需要大量劳动力。例如:在有很多城市内仍然有没有安装电梯的居民楼人们在运输家电时将浪费大量的劳动力。在果蔬运输时,一些大型的运输车无法进入种植场地,只能由人力运输到外部,再通过运输车运输到指定地方,加上种植场地道路复杂,在运输过程中容易出现磕碰造成果蔬的损伤,这样既浪费了大量的劳动力,又不能保证果蔬质量,工作效率低。在室内外运输货物时,搬运人员将会浪费大量劳动力去把货物运输到指定位置,再返回继续搬运货物,并且在运输一些贵重物品、易碎物品时不能保重货物的安全性。若能设计出一种自平衡调节平台的运输车,它完全可以作为人类搬运的替代工具,能够在狭窄的楼梯、室内外复杂的环境下完成对家电、药品、生鲜类和易碎类物品运输,这样能够在运输的过程中,保证货物的安全性,不会造成需多损失,节省了大量的劳动力。在机器人这个科技领域中发展最快最为流行的就是服务机器人,服务机器人的出现解决了人们生活的需要劳动力的场所,服务机器人的产生大大减少了劳动力,提高了工作效率。所以,现在研究出的运输车能够适应多种复杂地形和运输多种货物并具有的智能化程度高将会是未来运输车发展的走向。
1硬件系统设计
本設计包括控制系统、行走机构、夹持机构、自平衡升降机构、图像传输部分、GPS定位、检测模块,总体设计框图见图1。
1.1设计原理
采用推杆电机与平行四杆机构的配合,系统先判断是否有角度的产生,当有角度产生时先通过单片机内部PID计算,将得到数值赋值PWM,驱动推杆电机动作,从而推动连接轴,带动滑块运动,当滑块产生偏移时,四杆机构随之变化使载货平台保持水平。采用推杆电机其推杆电机的自锁能力和承载能力将会保证载货平台在运动过程中保持稳定不会发生滑动。
1.2夹持机构
本设计为解决在运输过程中夹紧货物使货物在平台稳定,故搭载了夹持机构。夹持机构采用滑块与推杆电机的配合,当单片机得到信号时将会驱动推杆电机动作,这时活动挡板随之移动,滑块在轨道上进行移动,与活动挡板同时移动。
2软件系统设计
通上电时首先进行系统的初始化,当初始化串口、陀螺仪、时钟、ADC采值、GPS完毕后进入main函数当中进行变量的初始化。程序开始先检测压力传感器数值判断是否有货物,如果没有货物保持不动,否则进行下一步,运输车开始运行,光电传感器实时检测控制电机避障,在运行过程中陀螺仪检测是否有角度产生,将角度的数值经过处理,通过PID算法控制电机,使载货平台保持水平,然后再进行判断角度,没有角度产生则继续运输,有角度产生则再进行上一步电机的驱动,GPS在运输中实时发送卫星位置。具体工作流程如上图2所示。
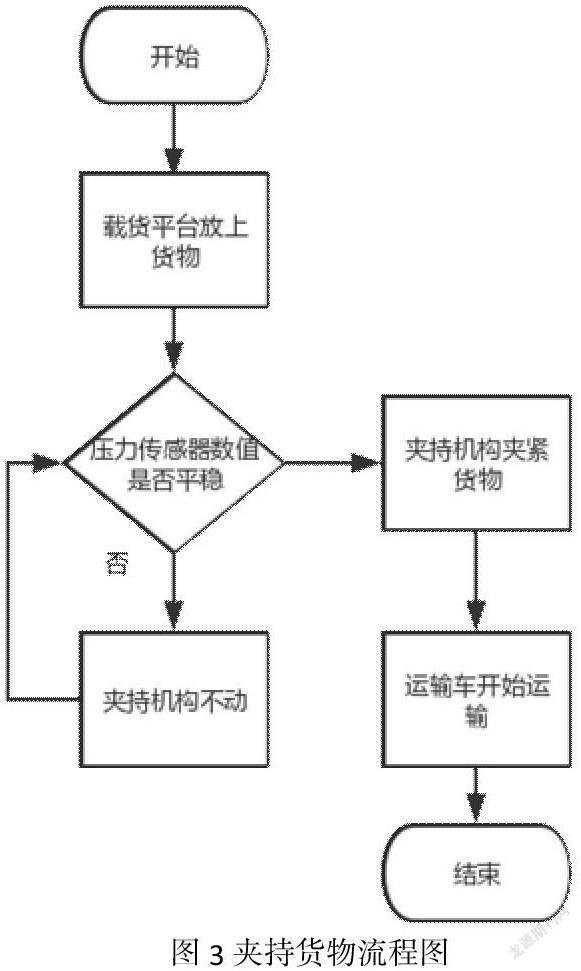
2.1夹持货物流程
本设计采用HX711称重模块,当放上货物时,程序用AD采集数值,采用均值滤波,设计连续间隔20us采集,把10次数值累加之后再除以10得到数值,连续得到均值滤波后的数值进行比较,判断货物是否已经平稳放上,当判断数值偏差较小,则推杆电机进行货物的夹紧,运输车开始运输动作;当数值偏大则运输车保持不动。夹持货物流程图见图3所示。
2.2载货平台自平衡的流程
本设计采用电机与mpu6050陀螺仪的配合,单片机采集到的陀螺仪产生的角度,将采集的数值先进行冒泡排序和均值滤波,滤波之后的数值再根据角度 得到电机需要转动的方向和角度,并给推杆电机一个PWM信号使其到达平衡点,再采集到达平衡点后的运输车的实时角度,再将该角度值反馈到单片机进行比较,从而形成闭环控制。载货平台自平衡的流程图如图4所示。
3结论
针对无电梯楼层间、室内外中短距离的场所及复杂地形的家电、药品、生鲜类和易碎类物品运输,载货平台始终保持与地面平行。推杆电机具有自锁功能,该设计可以自主行走并躲避障碍以及准确定位。行走机构采用履带式底盘,反应灵敏,耗能较低,电机采用差速方式转向,在楼梯等复杂地形转向更加灵活迅速。有效解决了多地形搬运物品的问题,有效的提高了搬运的效率、货物的安全以及大大节省了人力。
参考文献
[1]孟哲.防爆型电动履带式物料运输车的分析[J].机械管理开发,2020,35 (08):81-82.
[2]石少健,陈燕慧.无线远程操控果园自平衡运输车设计[J].农机使用与维修,2019(01):11-13.
[3]刘佛良,张震邦,杨晓彬,吴伟斌,洪添胜,郑鹏淋,张增博.山地果园双履带微型运输车的设计、仿真与试验[J].华中农业大学学报,2018,37(04):15-23.
该项目由青岛黄海学院校级国创项目《自平衡运输车》(X2020133200 72)支持。
青岛黄海学院 山东青岛 266427
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
电子制作(2019年15期)2019-08-27 01:11:48
中国惯性技术学报(2019年1期)2019-05-21 00:58:30
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
山东工业技术(2016年15期)2016-12-01 05:32:01
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
专用汽车(2016年9期)2016-03-01 04:16:51
专用汽车(2016年5期)2016-03-01 04:14:48
专用汽车(2016年4期)2016-03-01 04:14:17