
座舱压力控制系统控制重构设计
2021-11-29 04:40:22张钊杨忠陈爽刘舒畅张小恺
应用科技 2021年5期
张钊,杨忠,陈爽,刘舒畅,张小恺
1.南京航空航天大学 自动化学院,江苏 南京 211106 2.航空机电综合航空科技重点实验室 电子工程部,江苏 南京 211106
座舱压力控制系统为飞机环控系统的重要组成部分,其作用是保证座舱内压力及压力变化率在整个飞行包线内满足规范要求[1]。座舱压力控制系统的性能直接影响飞机结构和机组人员的安全,高空低压环境和过高的气压变化率会严重危害人的身体健康,甚至危及生命[2]。控制系统故障可能发生在控制器、执行器以及传感器等部位。对于座舱压力控制系统而言,故障隐患是普遍存在的。文献[3]研究发现造成座舱压力持续下降、飞行员耳膜疼痛的原因是一个尺寸很小的黑色杂质卡住了调压活门。文献[4] 对波音737座舱压力控制系统的执行机构排气活门的常见故障进行分析,其中包括活门门板抖动、限制电门开关信号不准确等。文献[5]针对模拟式座舱压力控制系统中易发生故障的控制器与前后外流活门制定了预防性措施。针对座舱压力控制系统不容忽视的故障隐患,需要利用系统冗余资源来实现容错控制。
目前针对座舱压力控制系统的研究主要集中在控制器方法设计上,比如PID 控制[6]、模糊控制[7]、模糊滑模变结构控制[8]、神经网络自适应控制[9]等。尽管压力控制效果得到了改善,但是所使用的方法未能为座舱压力控制系统存在的故障提供解决方案。之前对座舱压力控制系统的研究也没有考虑从控制器设计的角度来补偿由故障引起的不利影响。因此,为了在提供期望性能的同时提高可靠性和安全性,有必要设计一种座舱压力容错控制系统。
重构控制作为容错控制的一种方式,在航空航天领域有着广泛的应用前景。文献[10]针对小型无人机设计了舵面故障后的自适应重构控制律,保证过渡过程平稳并满足重构实时性要求。文献[11]为控制系统设计了基于简单自适应控制的重构方案。文献[12]提出模型跟随直接自适应重构控制算法来解决大型民机操纵面故障问题,并证明了所设计的闭环重构系统的稳定性。文献[13]采用经典PID 控制的形式为无人倾转多旋翼飞行器设计了重构控制策略,显著提高了飞行器工作的安全性。可以看出,重构控制在解决控制系统故障、提高系统可靠性与安全性方面具有不错的效果。
总结已有的研究并深入分析座舱压力控制系统的机理特性,发现以下3 个问题:
1)以往关于座舱压力控制系统的研究局限于控制方法设计和实际系统维护,尚未深入探索利用容错控制方法来提高其可靠性的领域。
2)大多数重构对象通常是属于多输入多输出(multi-input and multi-output,MIMO)的飞控系统,很少有研究针对属于单输入单输出(single-input and single-output,SISO)的航空机电控制系统重构。
3)所有的控制系统都可能存在传感器、执行器等潜在的故障。尽管如此,以前的大多数重构研究中考虑的故障类型主要是动力失效或舵面损坏。故障种类单一使得所提出的方法没有很强的普适性。
综合考虑以上问题,针对座舱压力控制系统典型故障,考虑利用模型跟随法进行重构设计。模型跟随法作为一种从模型参考自适应控制方法中演变而来的重构算法,通过对增益的调整,使实际故障系统的输出跟随参考模型输出,以达到理想的静动态特性[14]。该方法无需已知故障的精确信息,大大降低了系统辨识的工作量,提高了控制系统重构的实时性[15]。由于座舱压力控制系统的SISO 特性,针对执行器卡死等特殊故障,需要利用余度技术来进行重构设计。余度技术作为提高系统任务可靠性与安全性的一种手段,就是用可靠度不太高的组件组成高可靠的系统,在工程领域应用广泛[16]。余度设计的基本任务是:确定出容错能力准则,选定部件的余度类型和等级,确定系统的余度配置方案和余度管理方法[17]。常见的余度结构有双余度、三模冗余等[18]。
针对座舱压力控制系统存在的各种故障隐患,本文提出利用模型跟随法和余度技术对故障后的系统进行控制重构。首先将线性化后的座舱压力控制系统数学模型作为参考模型,然后通过故障注入得到故障模型,接着利用模型跟随法对故障模型进行控制重构,采用粒子群优化算法对重构参数进行优化,并设计了三热一冷的余度结构来重构执行器卡死等特殊故障,最后通过仿真验证重构效果。
1 座舱控制系统数学建模
1.1 工作原理
本文所研究的对象是数字式座舱压力控制系统[1]。如图1 所示,该控制系统由信号比较器、压力控制器、驱动电机、排气活门、压力传感器以及座舱组成。工作原理为:信号比较器接收指令压力值和由压力传感器输入的座舱实际压力值,将二者信号进行做差处理后传给压力控制器,进而控制驱动电机对排气活门开度进行调节,通过改变排气量实现座舱压力的调节[19]。
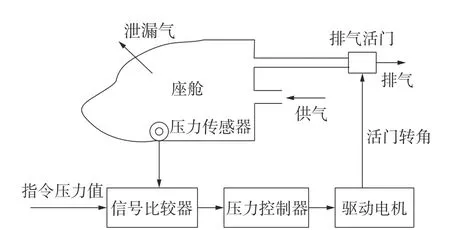
图1 座舱压力控制系统结构
1.2 建立参考模型
1.2.1 座舱模型
在建立模型之前须作以下假设[20]:在整个飞行过程中座舱温度和容积不变,座舱内空气按理想气体处理,座舱的泄漏量相对于供排气量很小,在建模时将其忽略,座舱的供气量保持恒定不变。根据以上假设得到座舱的微分方程[21]:

式中:Vc为 座舱容积,R为气体常数,Tc为座舱温度,Pc为座舱压力,Gk为座舱供气量,GB为座舱排气量。
当气体处于亚临界流动时,即Ph/Pc>0.528时:

当气体处于超临界流动时,即Ph/Pc≤0.528时:
式中:µB为 排气活门流量系数,FB为排气活门流通面积,Ph为 高度是h时的大气压力。
将座舱微分方程在平衡点处进行线性化后,对其进行无因次处理并设定座舱供气量恒定,得到座舱线性化方程[21−22]:

式中:Tcp为 座舱压力时间常数;gB为排气活门灵敏度对座舱压力影响系数。
1.2.2 驱动电机模型
用于带动排气活门的驱动电机一般选取直流电机[8],其方程表示为

式中:TM为 电机机械时间常数;α1为排气活门最大开度;λα为排气活门开度;r为减速器减速比;Ce为电机电势常数;u0为电枢最大电势;Xu为控制器输出电压值。
1.2.3 排气活门模型
本文采用蝶式阀门作为排气活门,活门流通面积为

式中FBg为活门最大流通面积。
在平衡点处对其进行线性化与无因次处理,得到活门线性化方程:

式中 α0为平衡状态时活门开度。
1.2.4 控制器模型
压力控制器采用工程上最常用的PID 控制:

式中:e(t)为 信号比较器输出,即指令压力Pcd(t)与座舱实际Pc(t)之 差;(KP、KI、KD)分别是比例增益、积分增益和微分增益。
1.2.5 补充方程
当以海平面起计算的高度h在 0∼12000 m时,大气压力Ph随高度变化的规律为[1]

式中P0为海平面上大气压力101 325 Pa。
2 控制重构设计
2.1 模型跟随法
模型跟随法通过引入负反馈,可使重构控制系统根据预先设定的故障模式自动调节故障后的系统。因其计算与设计简便,已被广泛应用于实际工程中[23]。模型跟随法结构如图2 所示,其实质是使实际系统输出跟踪参考模型输出,以达到理想特性。

图2 模型跟随法结构
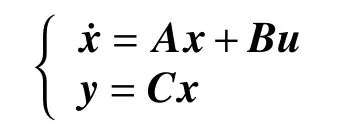
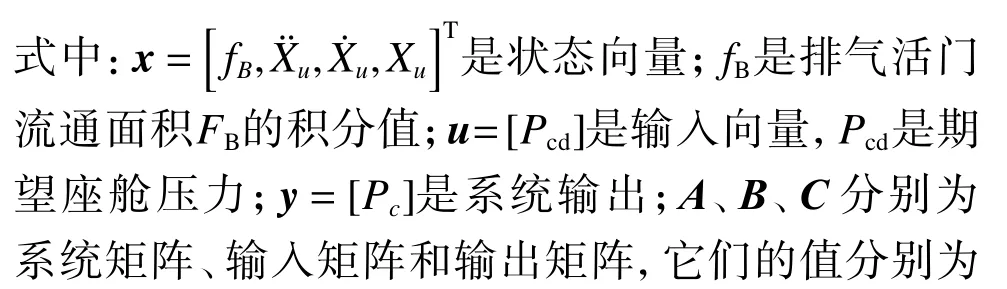
通过上文建立的模型,得到座舱压力控制系统状态空间方程:
式中:x为系统状态向量,u为系统输入向量,y为系统输出,A、B、C分别为系统矩阵、输入矩阵和输出矩阵。
当系统出现故障时,座舱压力控制系统状态空间方程表示为
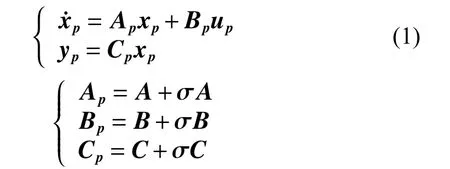
式中:xp为 故障模型状态向量,up为故障模型输入;yp为 故障模型输出,Ap、Bp、Cp分别为故障模型的系统矩阵、输入矩阵和输出矩阵,σA、σB、σC是由故障产生的有界参数摄动矩阵。
最终的控制目标是设计一个总控制信号,以使整个闭环系统中的所有信号都处于有界状态,并且座舱压力控制系统的输出跟踪如式(2)所示的参考模型的输出:

式中:xm为 参考模型状态向量,um为参考模型输入,ym为 参考模型输出,Am、Bm、Cm分别为参考模型的系统矩阵、输入矩阵和输出矩阵。

系统稳定是重构控制的前提条件,针对重构后的闭环系统,需要选取合适的Ke与Kp来保证Ap−BpKp−BpKeCp和 −CpBpKe的特征值全在复平面左半平面。
2.2 余度技术
相比于飞控系统[10],座舱压力控制系统不具备功能冗余,针对执行器卡死等特殊故障,重构控制律就显得无能为力,此时就要使用余度技术。如果选择直接并联压力座舱控制系统,会导致整个环控系统的体积增大以及消耗的成本增加,因此本文选择设计组件级余度技术。
从余度结构分,有以下3 种形式:无表决无转换、有表决无转换以及有表决有转换[16]。出于对系统自主检测、自主判断以及自主切换的目的,如图3 所示,本文设计了一种有表决有转换的余度结构:三热一冷结构,即在普通三模冗余基础上增加一模冷备份。其表决与切换方法主要是对输出信号进行比较:在正常情况下由3 个工作模块同时对输入信号进行运算处理,冷备份模块不工作;当3 个模块输出相同时,取3 个模块的平均值输出;当有2 个模块输出相同而另一个模块输出不同时,取2 个模块的平均值作为输出;当出现双模块故障或三模块输出都不相同时,直接断开三模块并启用冷备份模块进行工作。
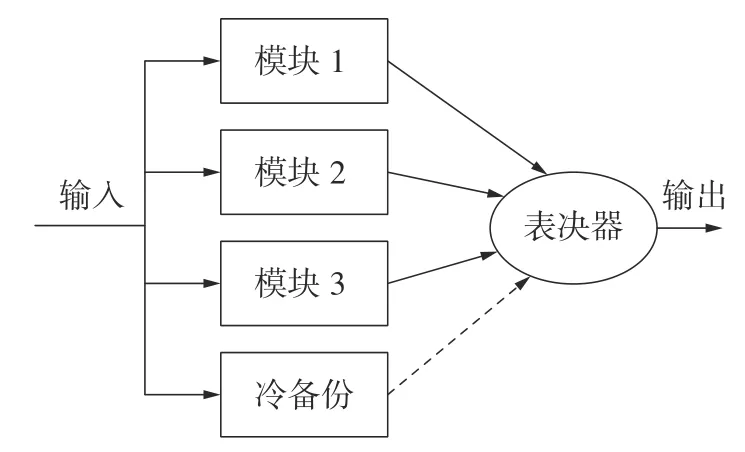
图3 三热一冷结构
相比于普通三模冗余,三热一冷在单故障−工作、双故障−安全的基础上实现了双故障−工作,利用尽可能少的冗余提升系统的安全性与可靠性,为工程应用提供新的思路。
3 仿真验证
3.1 仿真参数选择
本节安排仿真来验证所设计的模型跟随法与余度技术针对各种故障的有效性。基于MATLAB/Simulink 环境下搭建座舱压力重构控制系统,模型参数值见表1。

表1 模型参数值
根据先前的建模,可以将座舱控制系统重写为状态空间模型:


本文参考模型中Am,Bm,Cm与 上述A,B,C值相同。
文章模拟了飞机从起飞到降落的全过程,飞行高度曲线如图4 所示。

图4 飞行高度曲线
飞行高度函数为
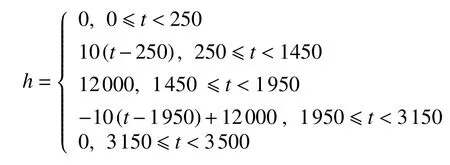
式中:h为飞行高度,m;t为飞行时间,s。
本文采用的压力制度为
式中:Pcd为指令座舱压力;Ph为 高度是h时的大气压力。
3.2 粒子群优化算法重构参数寻优
模型跟随法重构控制律参数中Km、Ku可以根据式(7)计算,但是在实际调试中发现若Kp取值也完全按式(7)计算,则会造成重构系统振荡,并且Ke的取值与重构性能指标没有明确的数学联系,采用“试凑法”工作量大且不易获得良好性能。针对该问题,本文采用粒子群优化算法(particle swarm optimization algorithm,PSO)对MATLAB/Simulink 中构建的重构控制律参数进行寻优[24−26]。各参数寻优范围为

式中:KP(1,j)表示矩阵KP第1 行第j列的元素;τ(1,j)表示KP(1,j)根据式(6) 计算出的理论 值,j=1,2,3,4,Kp(1,3)=Kp(1,4)=0。
粒子群优化算法最大迭代次数设置为1 00,种群规模为 20。考虑到最终目的不仅是使重构后故障模型与参考模型压力差值及抖振尽可能小,同时也要保证输入up尽可能小以减少耗能,故取适应度函数:

式中eg、upg分别为随迭代次数变化的参考模型与故障模型压力差e和 输入up。
通过粒子群寻优算法优化重构控制律参数,有效降低了调试过程的难度,获得更好的重构效果。经过仿真迭代后,得到如下最优重构控制律参数:
1)压力传感器失效与恒定漂移
压力传感器失效:

压力传感器恒定漂移故障,漂移系数0.8:

压力传感器恒定漂移故障,漂移系数1.4:

2)执行机构部分失效
执行机构失效20%:
执行机构失效40%:

3.3 指令压力跟随仿真
对本文所建立的座舱压力控制系统进行动态响应测试和在整个飞行包线中的压力响应测试,如图5 所示,可以看出其具有良好的动态性能,并且参考模型满足基本选取条件。
3.4 故障后的控制重构仿真
3.4.1 压力传感器故障控制重构仿真
本节针对压力传感器故障的控制重构,引入显性模型跟随法[27−28]与本文所用的带有负反馈的模性跟随法进行对比仿真。
座舱压力控制系统在1 500 s 时,即飞机在定高平飞状态时,压力传感器失效。重构前后参考模型与实际系统压力差曲线分别如图6、7 所示。由图6 可以看出,在座舱压力传感器失效造成的后果是非常严重的。如果不进行控制重构,飞机的结构可能会被强压破坏。由图7 可知,显性模型跟随法重构后压力差大并且存在抖振,本文采用的引入负反馈的模型跟随法针对压力传感器失效故障重构效果优秀,完美地将该故障屏蔽,从而保证座舱压力控制系统的安全性和可靠性。在1 200 s 时,即飞机正处于爬升状态,压力传感器恒定漂移,重构前后压力差曲线分别如图8、9 所示。从图8 可以看出,恒定漂移故障造成的压力差会影响机组人员健康甚至机组人员的生命安全将会面临威胁。由图9 看出,本文采用的重构方法相比于显性模型跟随法优势明显,虽然重构后仍存在较小的压力差,但对人体与机体毫无影响可以忽略。
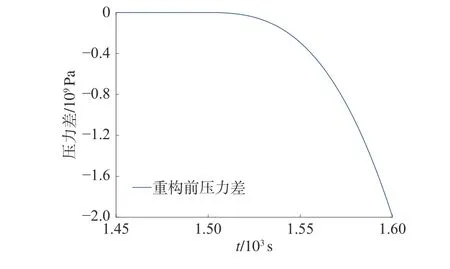
图6 压力传感器失效重构前曲线

图7 压力传感器失效重构后曲线

图8 压力传感器恒定漂移重构前曲线
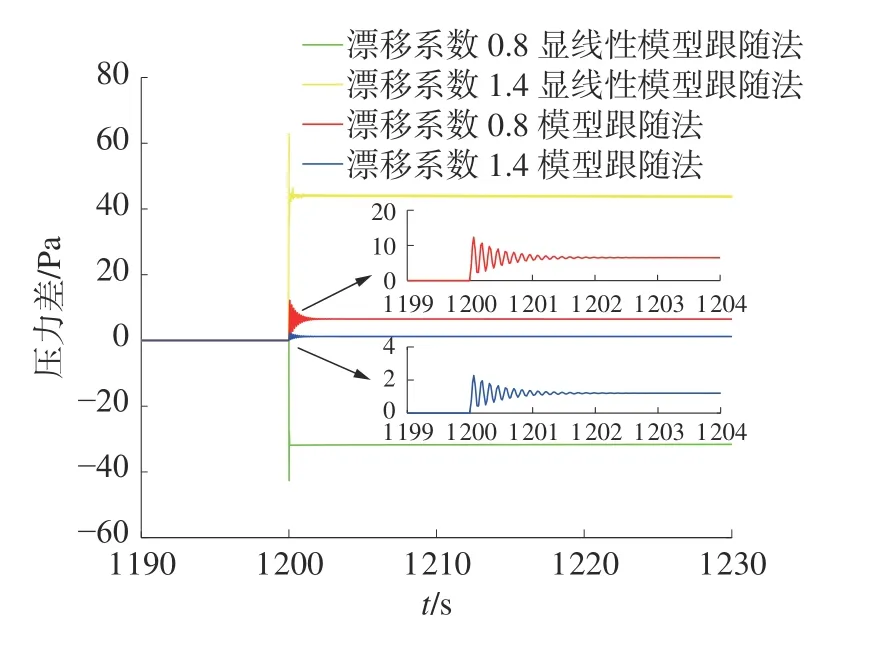
图9 压力传感器恒定漂移重构后曲线
3.4.2 执行机构故障控制重构仿真
在2 000 s 时,即飞机处于下降状态,座舱压力控制系统执行器部分失效故障,重构前后压力差曲线分别如图10、11 所示。综合图10、11 可以看出,针对执行器部分失效故障,模型跟随法重构效果良好,成功补偿了系统损失的控制输入量,保证了座舱压力控制系统安全稳定运行。

图10 执行器部分失效重构前曲线

图11 执行器部分失效重构后曲线
3.4.3 特殊故障控制重构仿真
座舱压力控制系统的特殊故障即利用重构控制律算法解决不了的故障,包括控制器失效与执行器卡死。针对特殊故障,利用Stateflow 为控制器与执行器设计了三热一冷的组件级余度技术,如图12、13 所示,为三热一冷的仿真框架与表决逻辑。本文测试三热一冷的仿真是针对的座舱压力控制系统非线性模型[20],在500 s 时和1 800 s时分别注入执行器卡死和控制器失效故障,特殊故障造成的压力差和利用三热一冷后的压力差曲线分别如图14、15 所示。可以看出,特殊故障对座舱压力控制系统造成的危害很大,利用本文设计的三热一冷余度技术成功地利用完好器件将故障器件替换,并且达到了单故障−工作、双故障−工作的要求,保证了座舱压力控制系统安全性与稳定性,为航空发展提供了新思路。
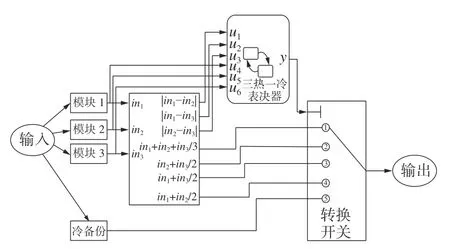
图12 三热一冷仿真框架

图13 Stateflow 表决机制逻辑

图14 特殊故障压力差曲线
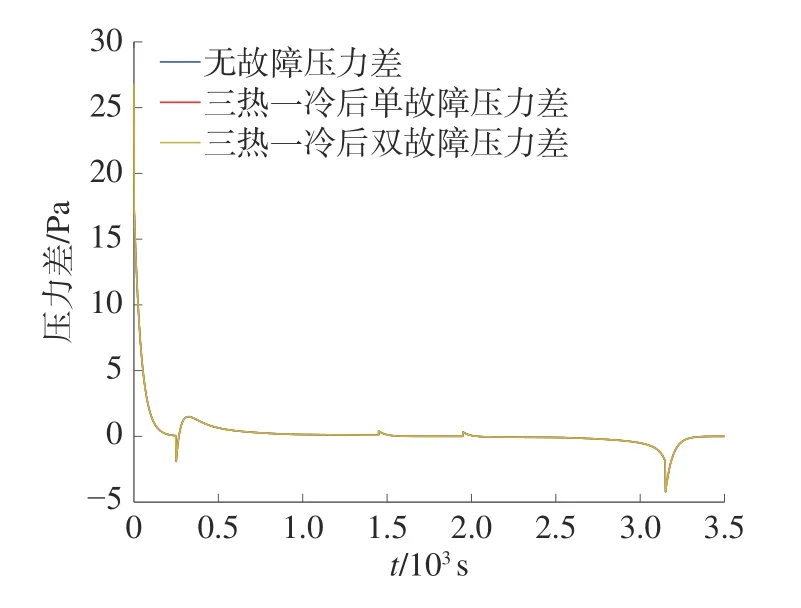
图15 利用余度技术后压力差曲线
4 结论
本文针对座舱压力控制系统存在的故障隐患,提出利用模型跟随法以及余度技术对故障系统进行控制重构。仿真结果表明,模型跟随法和所设计的三热一冷余度结构对故障系统的重构效果良好,保证了大部分故障发生后座舱压力控制系统的安全性与可靠性,为工程应用提供了新思路。根据正常工作的平衡点建立的线性模型来描述座舱压力控制系统这种非线性对象,如何将故障诊断模块与本文所设计方法相结合是以后研究工作的重点。
猜你喜欢
科技与创新(2021年2期)2021-01-29 07:37:50
科技风(2020年13期)2020-05-03 13:44:08
液压与气动(2019年9期)2019-09-17 11:26:26
西北工业大学学报(2018年4期)2018-09-07 10:31:04
舰船科学技术(2017年11期)2017-11-27 08:34:22
电气开关(2016年3期)2016-12-29 08:38:06
军事运筹与系统工程(2016年3期)2016-09-26 11:41:04
电脑知识与技术(2016年10期)2016-06-16 19:27:57
西北工业大学学报(2015年1期)2016-01-19 03:30:02
中国新通信(2015年17期)2015-05-30 10:48:04
