复杂地物背景下的电力线识别算法
2021-11-29 04:39骆顾平陈静苏成悦刘信宏徐胜王泰圣
应用科技 2021年5期
骆顾平,陈静,苏成悦,刘信宏,徐胜,王泰圣
广东工业大学 物理与光电工程学院,广东 广州 510006
在复杂地物背景下的无人机电力线路巡检技术已成为一项亟待研究的问题。从无人机航拍图像中精确检测并有效提取电力线是后续线路故障检测识别的关键性技术[1−2]。国内外学者针对电力线识别进行了大量的研究,提出了多种电力线检测与提取算法,常见的如传统边缘检测算子结合Hough 变换提取算法[3]、K-means 直线聚类分析[4−5]、基于方向的可控滤波[6−7]、局部直线段检测(line segment detector,LSD) 算法等[8−9]。文 献[10]利用传统Canny 算子边缘检测,Hough 变换提取直线,算法模型简单但抗噪性能差,误检率较高。文献[11] 调用改进线特征检测阈值的Ratio算子获取边缘并滤除背景噪声,结合改进Hough变换和最小二乘法提取直线,该方法参数选取复杂且无法有效排除类直线物噪声干扰。文献[12]利用卷积神经网络(convolutional neural networks,CNN)对二值边缘图进行分类,采用Hough 变换拟合电力线,但未能实现人工智能算法对电力线的定位。目前在深度学习框架下对电力线的识别因算法模型较为复杂尚未成功应用,电力线识别算法主要为边缘检测和边缘提取2 个步骤[13]。
针对目前边缘检测算法抗噪性差和边缘提取算法误检率高等问题,本文提出了复杂地物背景下的电力线识别算法,该算法通过改进Ratio 算子进行边缘检测同时基于轮廓特征过滤背景噪声,利用Hough 变换提取直线,最终通过直线编组拟合筛选算法实现电力线的识别与定位。
1 电力线识别算法
1.1 电力线的特征分析
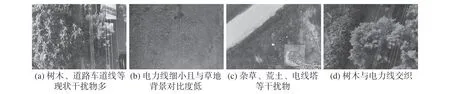
如图1 所示,多条电力线的亮度均匀连续且灰度相似,俯看电力线比地面背景亮,金属裸线更亮;电力线接近平行直线且贯穿整张图像,其宽度可预估为1~5 个像素;地面背景是复杂性的,地物如道路车道线、河流、房屋脊线以及其他人工背景中的类直线物对电力线的提取造成严重的干扰,电力线不易被识别。本文基于电力线特征,设计了一种复杂地物背景下的电力线识别算法,算法总体流程如图2 所示。
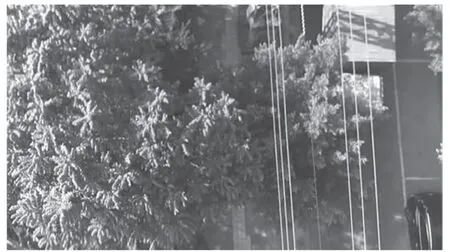
图1 原始电力线航拍图
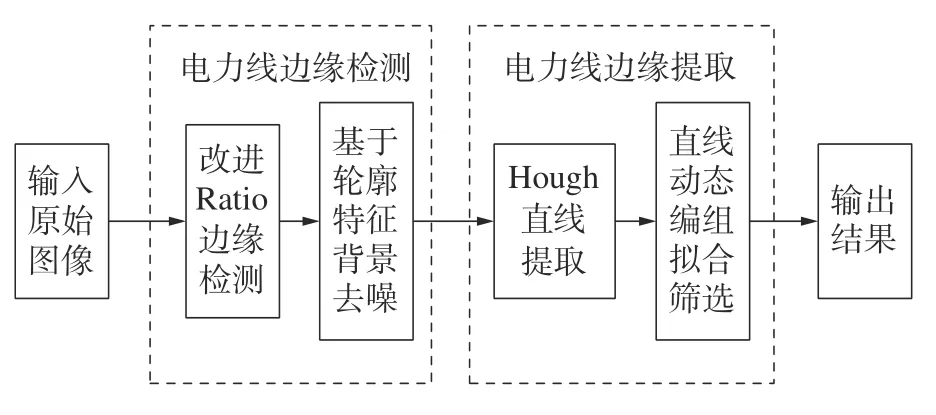
图2 电力线识别算法总体流程
1.2 电力线的边缘检测
1.2.1 改进的Ratio 边缘检测算子
Ratio 算子是一种利用中间区域和两边邻域灰度平均值的比值关系进行边缘检测的常用方法[14],可以有效抑制背景的非线状噪声,基于该模型提出的改进Ratio 算子原理如下。
以电力线方向设定垂直方向d的Ratio 边缘检测算子,算子模板如图3 所示。

图3 改进的Ratio 算子模板
以图1 中某像素点P0为模板中心,构建中间区域R1、左邻域R2和右邻域R3。定义区域Ri(i=1,2,3)的 水平宽度为wi,垂直长度为h,Ri包含像素数为ni=wi×h。设计算子模板参数为

式中依据预估电线像素宽度W0,取w1=W0。W0由成像原理得到:

式中:W为电力线实际外径值,f为相机焦距,无人机与电力线高度差为H,相机传感器感光面尺寸为m×n,图像分辨率为M×N。根据同一场景中输电线规格的一致性,则面向不同场景需要计算不同的W0值,同一场景的所有图像只需要确定唯一的W0值。
分别统计区域Ri内 灰度平均值mi:
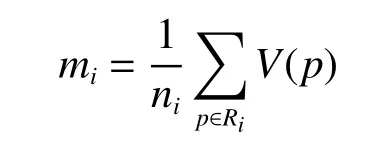
式中:p为区域Ri内 的像素点,p的灰度值为V(p)。基于电力线在背景中更亮的特征,定义改进的Ratio 算子线形边缘检测特征值为

设定阈值Uth,当U>Uth时,则确定P0为目标边缘点。经过大量实验设定阈值Uth为1.05,改进的Ratio 边缘检测算法流程如图4 所示,其中 (i,j)为P0的 坐标索引,得到二值化的边缘响应图像F′(x,y)如图5 所示。
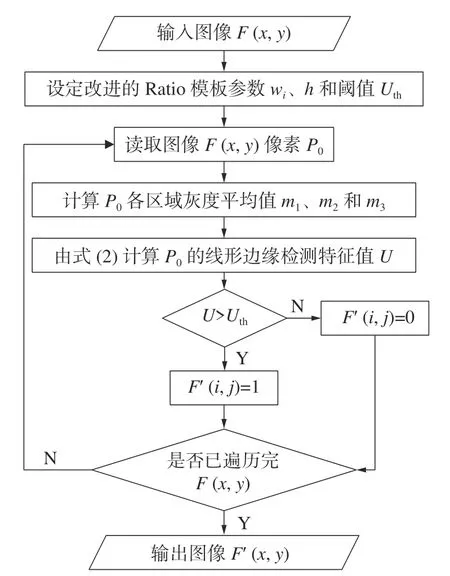
图4 改进Ratio 边缘检测算法流程

图5 改进Ratio 边缘检测结果
1.2.2 基于轮廓特征的背景去噪算法
图5 中电力线边缘与背景噪声没有相连且是方向一致的大面积连通域;除了线状噪声形成较大面积区域,其他噪声是分散的小面积连通域。故提出基于轮廓特征的背景去噪算法,分别采用轮廓面积S和轮廓方向D来描述连通域的轮廓特征。轮廓面积定义为连通域内的像素数总和,搜索连通域内欧氏距离最大的两点Pa和Pb,定义为轮廓方向。算法具体步骤为:
1)遍历边缘响应图F′(x,y)置1 的全部像素点,保存连通域集合QΩ={Q1,Q2,···,Qn−1,Qn}。
2)读取QΩ中Q并计算其轮廓面积S和方向D,分别保存到轮廓面积集合SΩ和方向集合DΩ中。
3)重复步骤2)直至遍历完QΩ所有元素,定义一个轮廓特征为X=(Q,S,D),得到轮廓特征集合XΩ。
4)提取集合SΩ中最大值Smax。遍历XΩ中元素X,保存满足S>(Smax/3)条件的X且定义为标准轮廓特征X′=(Q′,S′,D′),得到标准轮廓特征集合。
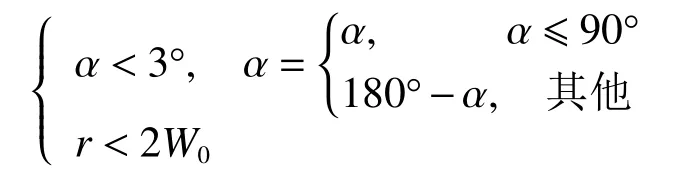
5)提取XΩ中 元素X,定义Pa到 线段的距离为r,D和D′的夹角为 α,定义去噪准则如下所示
6)重复步骤5)直至提取完XΩ中所有元素,最后依据F′(x,y)中保留的连通域得到去噪处理后的边缘图像B(x,y),如图6 所示,背景噪声基本被滤除,同时保留了电力线上的小面积断裂边缘段。电力线边缘检测结果较为完整,但存在断裂现象且结果中包含了道路车道线等非电力线干扰边缘段。

图6 基于轮廓特征的背景去噪算法处理结果
1.3 电力线的边缘提取
1.3.1 Hough 变换提取直线
Hough 变换(Hough transform,HT)是图像处理技术中提取线形特征的常用方法,这是基于点− 线的对偶性变换,使用表决方式的参数估计技术将图像空间中的检测问题转换到参数空间中进行。依据公式 ρ=xcosθ+ysinθ把每一条直线表示为一对参数 (θ,ρ),通过在参数空间里进行累加统计并寻找累加器峰值的方法来提取直线[15]。
1.3.2 直线动态编组拟合与筛选算法
由HT 获取的直线仍存在断裂与重叠问题,利用直线动态编组拟合与筛选算法完成最终电力线的边缘提取,图7 为线段L和点P0参数表示图。
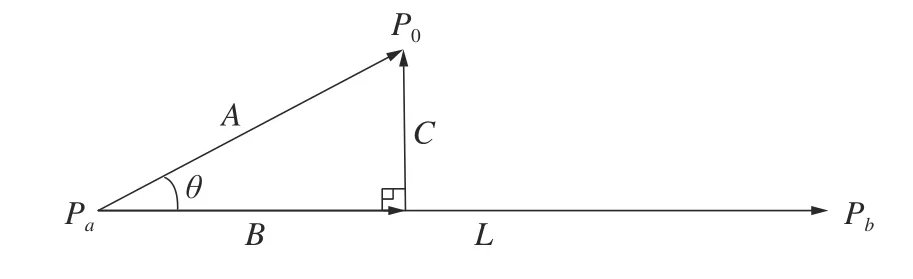
图7 线段L 和点P0 参数表示
如图7 所示,定义直线段L=Pa和Pb为L的两个端点,定义两条直线夹角 θ为

当满足 θ<θth条件时,则认为该两条直线互相平行。取线段L′某端点为P0,则两条平行线段L和L′的侧向间隔为

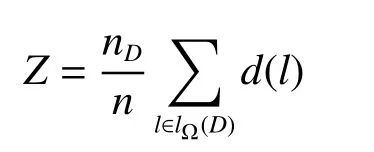
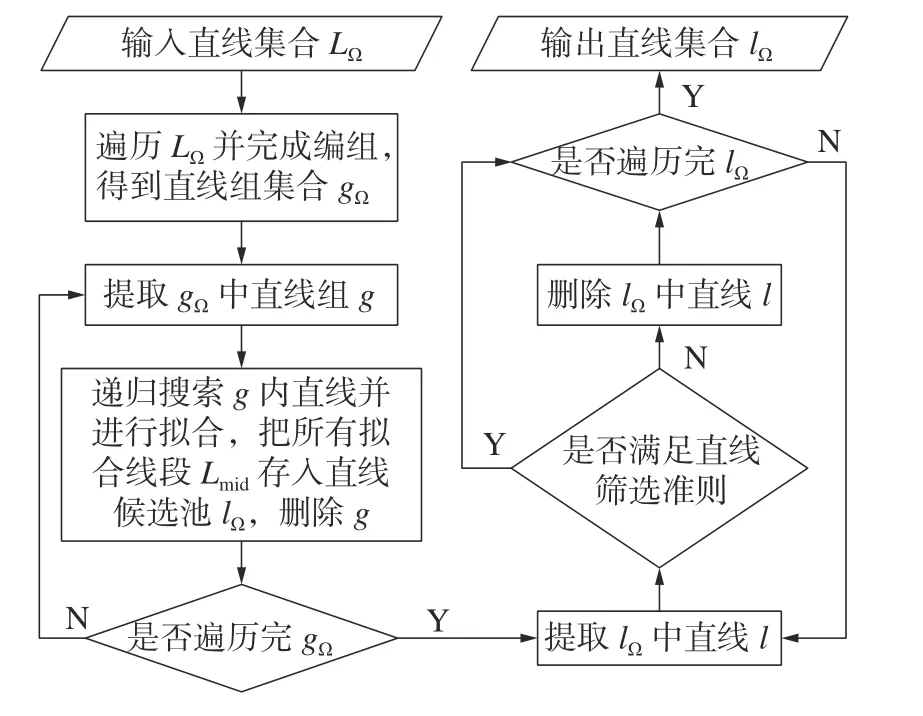
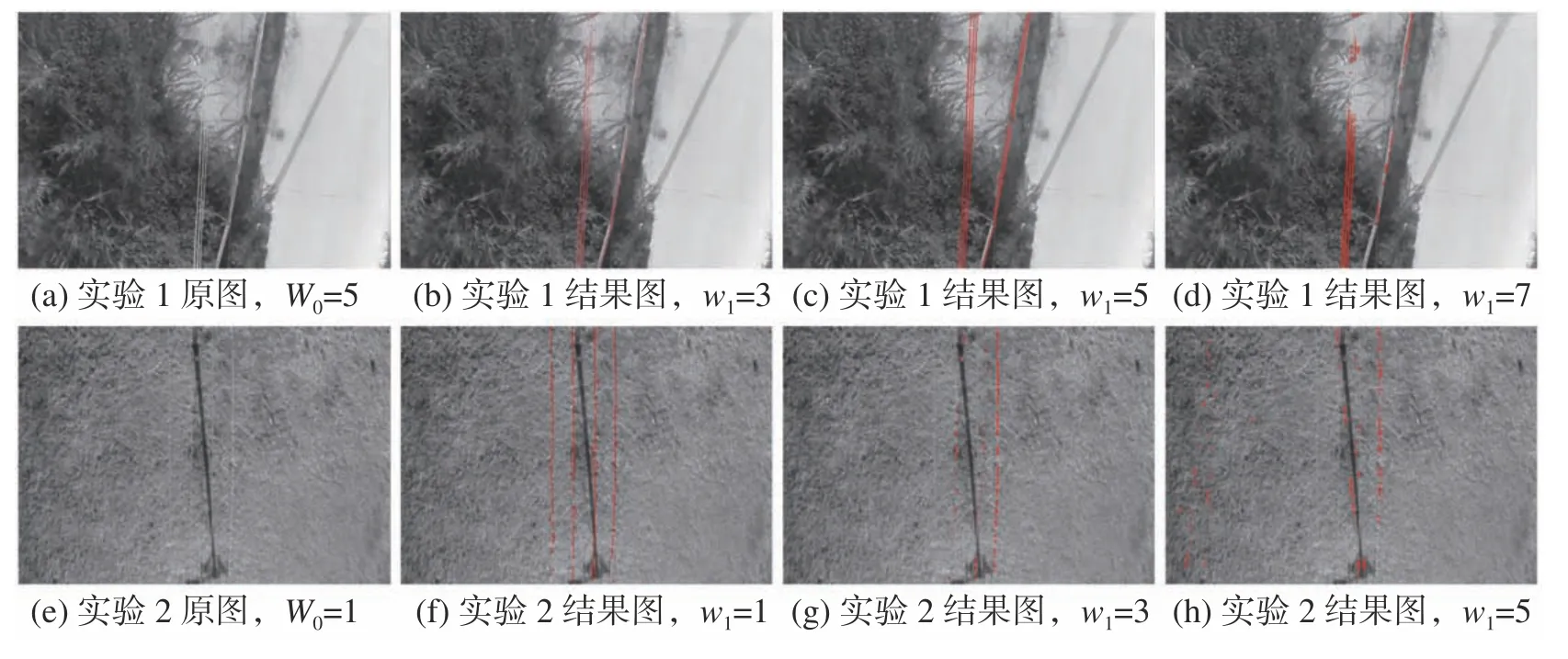
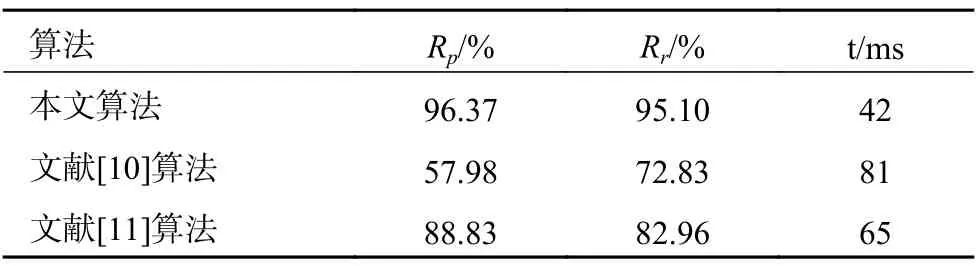
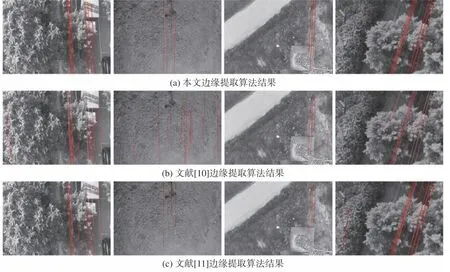
当Gdiff 式中k=|B||L|−1。当Hdiff 图8 拟合线段 Lmid 参数 由拟合连接原理得到直线候选池,直线数量为n,并将其分为多组直线且每组内的直线互相平行,以组内最长线段方向D代表该组的直线方向,计算公式为 式中:lΩ(D) 是 方向为D的直线组;nD是lΩ(D)内的直线段数量;d(l)为线段l的长度。统计所有直线组得到集合 {Z1,Z2,Z3,…},则提取该集合最大值对应的方向D0作为电力线的主方向[16]。从边缘图B(x,y)提取与线段L重叠的边缘段并计算其在原图F(x,y)所 处区域的灰度均值为V(V∈[0,255]),统计灰度相似的边缘段占比与边缘段区域面积累加和的乘积进行排序,提取最大值对应的灰度均值V0为电力线的标准灰度值。为了过滤直线干扰,给出直线筛选准则如式(4)所示,其中由式(3)计算直线段与D0对应直线的夹角为 θ0,则满足式(4)的线段保留,否则被剔除。 由上述直线编组拟合和筛选原理,设计算法流程如图9 所示。 图9 直线动态编组拟合与筛选算法流程 算法的具体步骤如下,其中 θth=3°;Gth=2W0;Hth=0.25×rows,r ows为图像总行数。 1)由HT获取直线段集合LΩ={L1,L2,…,LN−1,LN}。 2)从LΩ中 选取最长线段Lmax,遍历LΩ并把与Lmax满 足 θ<θth且Gdiff 3)重复步骤2)直至LΩ=φ。 4)提取gΩ中元素g,在g内选取起始线段L并搜索其Hdiff值最小的子线段,当该子线段和L满足Hdiff 5)重复步骤4)直至gΩ=φ。 6)依据lΩ统计电力线的主方向D0和标准灰度值V0。遍历lΩ,满足筛选准则式(4) 的直线保留,否则被剔除。电力线边缘提取结果如图10 所示,可见算法有效提取电力线边缘,解决由HT 提取直线的断裂与重叠问题,同时排除了图中的道路车道线等干扰直线。 图10 电力线边缘提取在原图中的标记 实验平台为台式计算机,处理器为Inter (R)Core (TM) i7-8 700 CPU@3.2 GHz,内存为16 GB,图像分辨率为1920×1 080。采用平均准确率(Rp) 和召回率(Rr)作为算法的精度评价指标,利用平均处理时间(Tc) 评价算法的时效性。其中,Rp=Np/Ne;Rr=Np/Ng;Np为正确提取的电力线像素个数;Ne为提取结果中的所有像素个数;Ng为原图中的电力线像素个数。 电力线识别算法待确定的参数为改进的Ratio 模板中间区域宽度w1。为了验证w1=W0时电力线边缘检测效果最好,设计两组实验,每组实验针对同一张航拍图像并预估其电力线宽度W0,W0值可通过式 (1) 计算得到。设置不同w1参数得到边缘检测结果在原图中的标记如图11 所示。图11 中,w1取值过大或过小时电力线边缘都出现了更多断裂的情况,同时产生更多的背景噪声,如图11(b)、11(d)、11(g)、11(h) 所示。w1=W0时检测到电力线的完整性最高且边缘宽度最接近电力线实际宽度,如图11(c)、11(f)所示。故设定w1=W0为本文边缘检测算法的模板参数。 图11 不同w1 参数的边缘检测结果 为了验证本文所提算法的可行性,分别运用本算法、文献[10−11] 算法对不同场景的复杂地物航拍图进行识别和对比分析,实验场景如图12 所示,各种算法对比的边缘检测结果和边缘提取结果分别如图13、14 所示。统计算法的性能指标值如表1 所示。 表1 3 种算法的性能指标值 图12 实验场景原始图 在图13 边缘检测结果中,文献[10]算法产生大量无效的边缘像素点且对电力线边缘干扰严重;文献[11]算法通过设定去噪阈值Nth可过滤大部分背景噪声,但检测的电力线边缘较为粗糙且断裂多,选取Nth过大容易错误滤除部分电力线边缘段,Nth过小则保留更多背景噪声;本算法对电力线边缘的检测较为完整,并且无需设定去噪阈值,基本滤除了干扰噪声,抗噪性更强。 电力线提取结果如图14 所示,文献[10]和[11]算法均不能有效排除车道线等类直线干扰物且电力线拟合提取的完整度较低,文献[10]方法错误识别更多的无效直线;本算法可以较完整提取出4 种场景下的电力线边缘且充分排除了地面的线状干扰物,识别的精度更高。从表1 可以看出,与其他2 种算法相比,本算法在识别准确率和召回率上均有明显的优势且处理速度更快,其中准确率分别提高38.39%和7.54%,召回率分别提高22.27%和12.14%。由以上比较分析可知,本文所提算法在多种复杂地物背景下的电力线检测与提取效果明显优于其他2 种常见同类算法,电力线的最终识别更加完整与准确。 图14 3 种算法的电力线边缘提取结果在原图中的标记 1)本文提出了一种复杂地物背景下的电力线识别算法,改进了Ratio 算子模板参数关系和边缘检测特征值且参数选取简单,提高了电力线边缘检测的完整度。 2)利用基于轮廓特征的背景去噪算法可以在保留电力线上小面积断裂边缘的同时滤除绝大部分背景噪声,算法无需设定去噪阈值,自适应性强。 3)直线动态编组拟合与筛选算法不仅有效解决直线的断裂重叠问题,而且排除了地面线状物干扰,提升了电力线最终提取的准确精度。相对于其他常见的同类算法,本算法表现出更高的识别精度与处理效率,其中识别准确率达96.37%以上,同时具备较强的抗干扰性以及稳健性,可在不同复杂地物中快速有效识别出电力线,对无人机智能巡检具有较高的工程应用价值。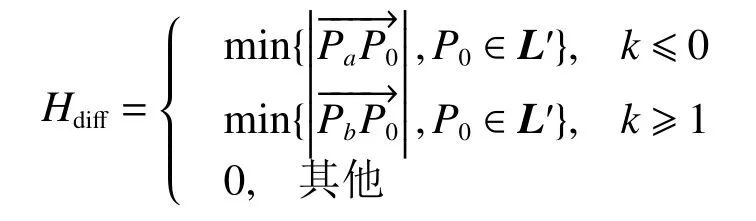



2 实验结果与分析
2.1 参数分析
2.2 对比实验分析
3 结论
猜你喜欢
数学物理学报(2021年2期)2021-06-09装备制造技术(2020年1期)2020-12-25应用数学(2020年2期)2020-06-24制造技术与机床(2019年11期)2019-12-04数学年刊A辑(中文版)(2018年2期)2019-01-08电子制作(2017年14期)2017-12-18中国交通信息化(2017年4期)2017-06-06数学物理学报(2016年3期)2016-12-01电信科学(2016年11期)2016-11-23电测与仪表(2014年13期)2014-04-04