基于Unity 3D的物理实验仪器虚拟系统
2021-11-29 06:23牛海波李育新刘会玲王小克
物理实验 2021年11期
牛海波,李育新,刘会玲,王小克
(西安交通大学城市学院,陕西 西安 710018)
基础物理实验课程覆盖面广,不仅包含了丰富的物理知识和思想、物理实验方法和手段,也包含了各种类型的实验仪器[1]. 课程中的很多实验项目需要经常使用基本仪器,如千分尺、游标卡尺、显微镜等,特别是有些实验项目就是围绕着特定仪器的使用学习来设置,如分光计、示波器等. 这些仪器的原理、结构和操作涉及到较为复杂的空间三维关系,而刚进入大学的学生,实验能力普遍薄弱,空间想象力不足,仅凭教材中的仪器平面图示和文字说明,难以在预习及课堂阶段进行有效学习,导致教师难以在课堂开展有效教学. 此外,现有的一些商业化的物理实验虚拟仿真系统,其中的仪器为二维结构,侧重于实验整体的学习,如实验的接线、数据测量等,没有专门针对实验仪器的三维仿真教学. 因此,这些具有复杂空间三维关系的仪器成为基础物理实验教学中的难点,造成了“教师难教,学生难学”的教学问题.
针对以上基础物理实验教学问题,采用三维虚拟仿真技术[2-6],开发了部分仪器的虚拟仿真系统. 系统重在仪器结构、原理及调节的学习,不仅可以虚拟拆解仪器,还具有展示、光路跟随、动态调节、测量结果判断等功能. 系统具有良好的人机交互、多平台支持、学生听讲与操作互不干扰等特点. 这些特点弥补了学生存在的空间思维能力不足的缺点,提升了基础物理实验课程的教学效果,有效解决了上述教学难题.
1 虚拟仿真系统的开发
1.1 开发思路
仿真系统的开发采用以学生为中心,以问题为导向的思路[7-8]. 首先根据实验仪器教学中学生的学习特点、学习中的普遍难点以及经常出现的问题,确定仿真系统的建设内容. 然后分别从教师、学生角度提出虚拟系统的功能需求、使用需求等,确定项目设计方案. 再初步开发出实验仪器的虚拟仿真系统,最后将其在课程教学中试用,给出反馈意见后进一步修改完善,形成最终的成套软件.
虚拟仿真系统功能的设计与实现是系统开发的重点. 虚拟系统以提升学生学习效果为目的,实现“知结构”“懂原理”“会操作”的主要功能,且3个功能逐层递进. 以分光计虚拟仿真为例,系统功能如图1所示. 分光计结构复杂,包含较多的光学原理. 如JJY-1型分光计的各种控制螺钉就多达22个,对应不同的调节功能[9]. 因此分光计仿真系统的第1个主要功能要实现各部件内外部结构以及各控制螺钉功能的认知. 在“知结构”基础上,系统第2个主要功能是实现望远镜及准直管中所蕴含的光学原理,即“懂原理”,如绿十字像如何产生,与分划板上十字叉丝之间的关系等. 最后,在“知结构”和“懂原理”的基础上,系统第3个主要功能是“会操作”,即实现学生调节系统达到同轴等高,能通过游标进行读数并与系统给出的结果进行对比等功能. 通过以上递进的功能设计,将提升学生的学习效果及操作效率.
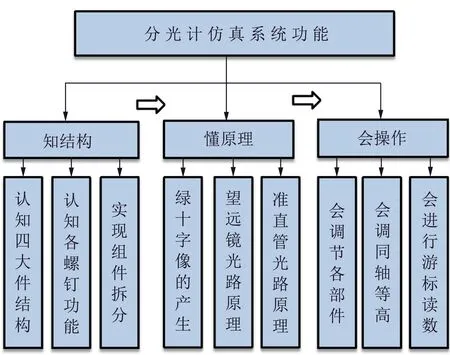
图1 分光计虚拟系统的功能设计图
1.2 系统开发平台与开发流程
采用 Unity Technologies公司出品的Unity 3D作为虚拟系统的开发平台,Unity 3D具有创建三维视频游戏、实时三维动画等类型的互动内容功能,且交互性强、画面质量高[10-15],近年来逐渐被应用于教育领域中虚拟仿真教学系统的开发. Unity 3D中所有的空间模型均为矢量,局部放大后依然清晰. 系统采用的建模工具为Blender,可高效创建三维模型. 系统的交互操作功能通过C#编程实现.
系统的开发流程如图2所示. 首先通过拆解实验仪器,测量各部件的结构参量,然后根据测得的参量在Blender中对每个零部件进行相同比例的独立建模. 为展示一些复杂仪器的内部结构及调节原理,如分光计的阿贝目镜、望远镜筒、准直管这3个核心部件的内部结构及光学调节原理,测量显微镜的镜筒内部结构,采用纵向刨开建模,从而可以看到结构内部所有的透镜、棱镜及叉丝分划板. 将Blender中建好的三维模型以FBX文件格式导入Unity,最后根据实验仪器的机械结构在Unity中进行组装. 组装时根据教学需要和支撑作用指定模型之间的主从关系,并通过添加恰当的材质和贴图,进一步增强模型的真实感.

图2 系统开发流程
2 虚拟仿真系统主要功能的实现
2.1 三维建模
在建模过程中,结构的整体部分根据前视图制做,细节部分根据实物来调节. 以结构复杂的分光计建模为例,对镜筒建模时,先在模板画1条样条线,然后画1个圆环,最后进行放样操作. Y 型支架通过圆环、长方体、圆柱体等基本标准体通过布尔运算组合形成. 对于三脚架建模,通过构建1个圆角长方体,然后采用 FFD 命令改变其形状来完成. 望远镜的目镜结构相对比较复杂,将其拆分成3部分进行建模,然后通过布尔命令进行组合. 分光计的刻度盘共有 720 个小格,每个小格对应 0.5°,共360°. 因此刻度盘的建模用到了阵列工具,在制作时先设计1个长方体,通过阵列旋转 360°,数量设为 720来完成. 游标盘的制作也用阵列工具实现.
建模时对部件的细节进行精细还原,通过布尔命令切割,实现分光计载物台上的圆形纹路. 综合利用Blender的功能实现了千分尺套筒及棘轮上的刻痕,通过对光学仪器中的透镜进行倒角处理,使其边缘更圆润,增加了与实物图的契合度. 再使用 VRay 渲染软件对模型添加材质和贴图,并用不同颜色区分不同部件以便对比观察. 因此仿真系统与真实仪器相似度非常高,使学生从虚拟仿真系统的模拟练习过渡到真实仪器的操作时更加自然. 建模后的虚拟仿真系统整体结构如图3所示.

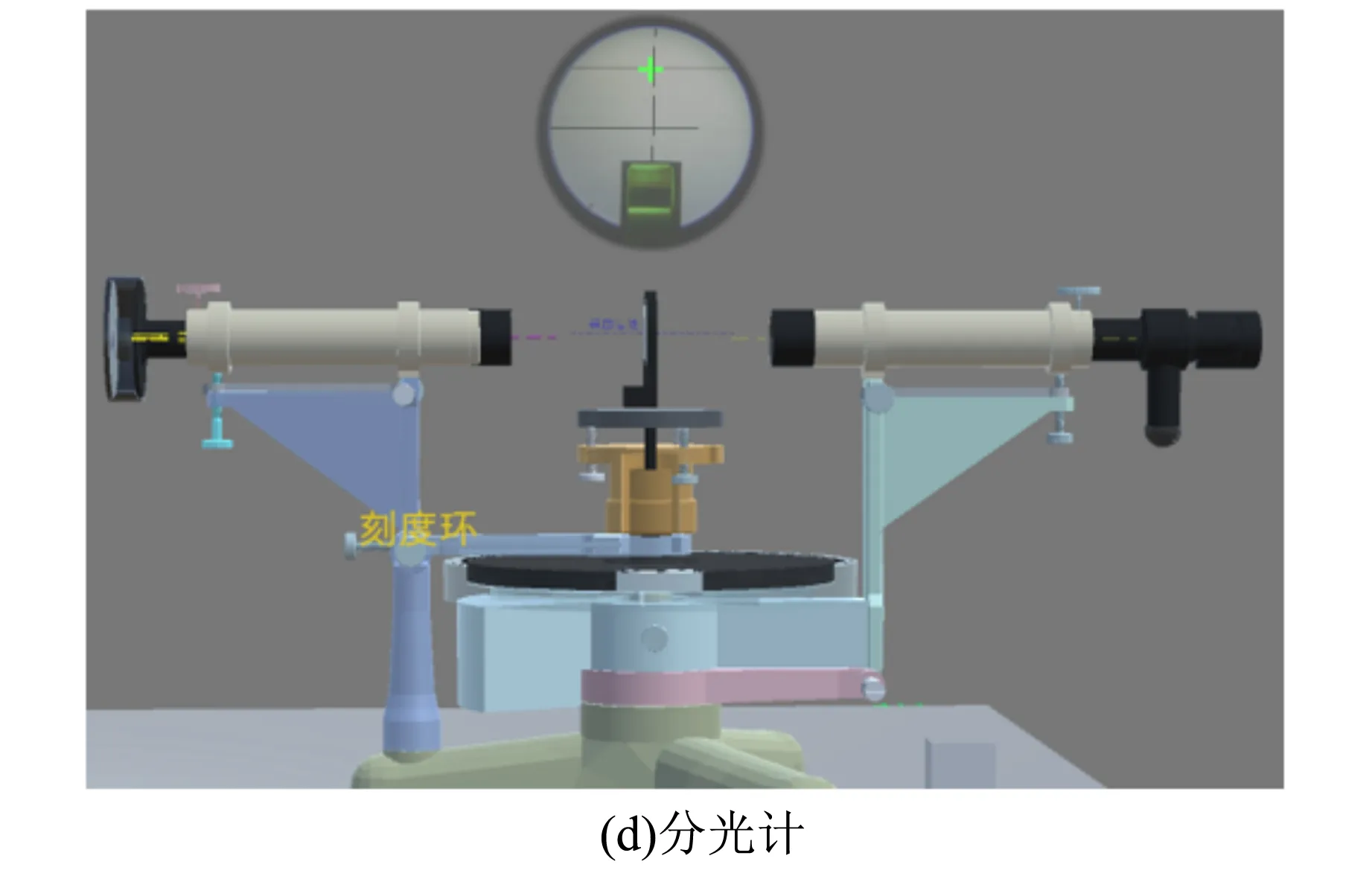
图3 开发的虚拟仿真系统
虚拟系统整体模型建立后,下一步骤是交互功能的设计,主要围绕着“知结构”“懂原理”“会操作”来实现.
2.2 知结构
本文开发的虚拟仿真系统实现了从空间任意角度观察认知仪器的结构. 为了提高人机交互效果,从学生使用角度出发,分别对鼠标左中右键进行功能设定,可以便捷地对仪器进行转动、平移、放大及缩小操作. 在“知结构”功能下,鼠标移到主要部件上,会显示该部件的说明. 例如在分光计虚拟系统中,鼠标移到每个螺钉上,会出现文字介绍该螺钉的功能. 此外,通过设置滑动条上下滑动,实现仪器的拆分及组装功能,使学生进一步了解仪器的结构组成,如图4所示. 通过拆分,学生可直观学习分光计是由各部件围绕着主轴嵌套而成;千分尺的套筒、螺杆、棘轮嵌套关系也一目了然.

(a)分光计
通过对真实仪器部件的拆分测量,研究其内部机械及光学结构,再准确建模,虚拟仿真系统实现了对仪器内部结构的模拟. 在知结构功能下,系统以透明方式,展示了重要部件的内部结构,学生通过在部件上点击左键就可观察仪器内部结构. 如图5所示,分光计望远镜筒内部的分划板及棱镜、准直管中的狭缝装置、测量显微镜的镜筒内部构造特别是五角棱镜等,都被真实地显示出来,大幅降低了仪器结构方面的学习难度.

图5 仪器内部结构
2.3 懂原理
物理实验仪器的结构中蕴含着丰富的物理原理,或者说为了实现物理原理,仪器的结构才设计得如此复杂巧妙. 实验仪器中的物理原理学习一直是教学中的难点,也是仿真系统开发中的难点. 例如:分光计中学生不清楚绿十字像是如何形成的,准直管为什么可以产生平行光. 针对以上难点,系统引入辅助线表征光线,然后分析光路中的空间解析几何的数学关系,通过C#编程准确模拟了光路原理,并以光路跟随的形式直观地展示了上述过程,方便学生学习.
图6为准直管中的光路原理,通过物镜焦距、狭缝位置等数据,并根据成像原理,设置滑动条,实现了移动狭缝装置,出射光从发散→平行→会聚状态的自然顺畅模拟,使学生清晰地学习近轴光线传播原理. 同理,如图7所示系统也模拟了望远镜中的光路原理,学生根据入射光线与反射光线的对应变换关系,可直观了解绿十字像如何形成,成像在何位置,掌握仪器中以往较难理解的空间三维关系,从而降低了仪器原理的教学难度.

图6 准直管光路原理模拟

图7 望远镜光路原理模拟
分光计和测量显微镜在真实测量中都存在如下操作:随着持续调焦,像会从模糊→清晰→模糊进行变化,此操作目的是为了寻找最清晰的像,很多光学实验中都有类似的操作,此操作也是锻炼学生实验技能的重要步骤. 在这步的仿真中,如果采用多幅图片播放的方式模拟像的变化过程,会造成卡顿、不连续、不真实的缺点. 为实现模拟过程的顺畅,创新性地借鉴三维游戏的制作功能,通过编程实现连续显示,达到预期目标. 如图8所示,在系统中设置滑动条,拖动滑动条即可使目镜筒的位置发生连续变化,使绿十字像的调节过程顺畅真实地再现.

图8 绿十字像渐变过程
2.4 会操作
实验仪器中不仅蕴含丰富的物理原理,也对应着相对复杂的操作,因此实验仪器的操作也成为教学中的难点. 系统以仪器中的物理原理为基础,通过分析仪器中空间解析几何的数学关系,准确测量需要的各类参量,再利用C#编程准确模拟仪器的操作. 如图9所示的千分尺仿真系统中,通过准确设定螺纹螺距及50个等分刻度,实现了模拟真实操作. 例如,学生通过鼠标左键点击套筒并向右滑动,可使套筒向后转动,带动测微螺杆向右运动,然后根据刻度指示练习读数.
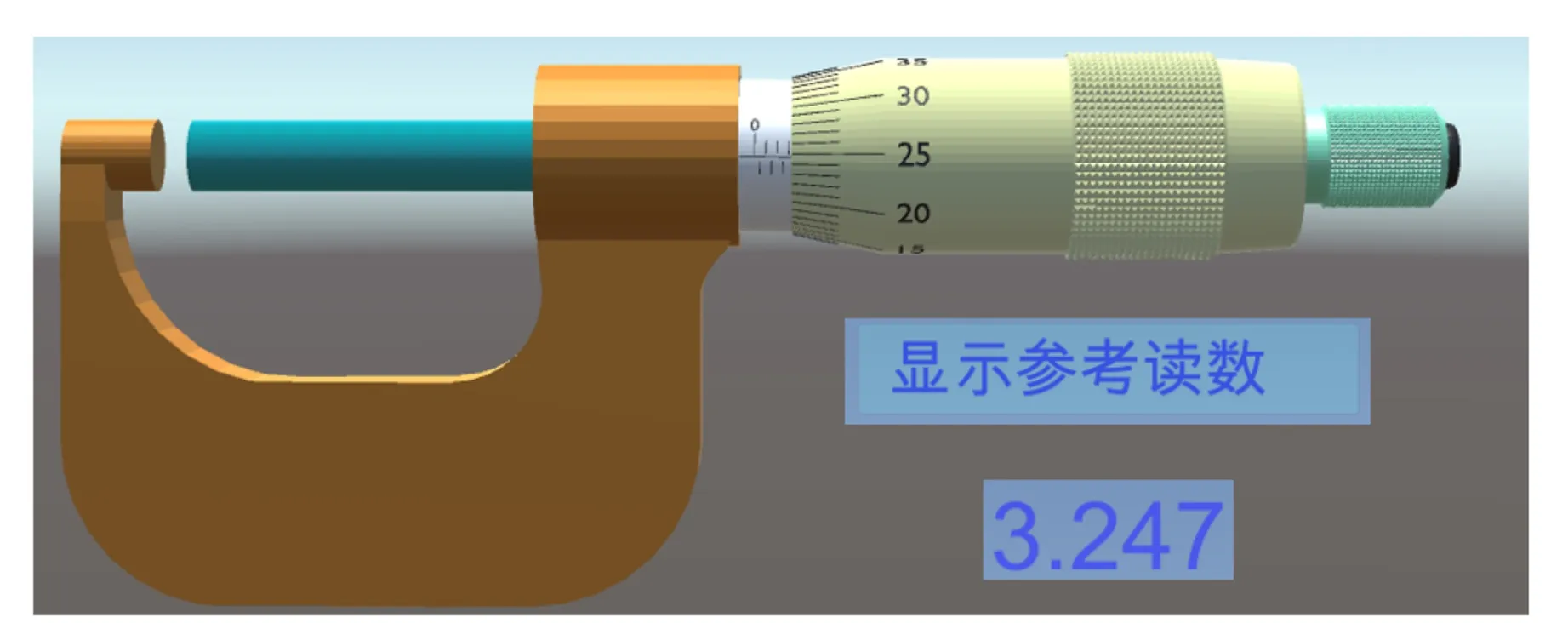
图9 千分尺仿真系统
同轴等高调节是光学实验的基本操作,也是难点. 例如在分光计教学实践中,学生普遍感觉最难的是调节系统的同轴等高,调好的标志是双面平面镜的2个面分别正对望远镜时,绿十字像应和最上方的十字叉丝重合. 在教学中发现学生因为不清楚绿十字像的位置如何变化,导致调节仪器时思路不清,从而不清楚载物台下螺钉和望远镜下螺钉的调节顺序及调节方向. 因此在开发虚拟仿真系统时,首先分析了光路中的数学关系. 例如载物台下方3个螺钉的顶点组成等边三角形,设此三角形高为H;螺钉的螺距为s,设分划板距载物台中心距离为L,根据几何关系,可得出当载物台下方的调节螺钉旋转1周时,绿十字像的位置改变量为
Δx=2Larctan (s/H).
同理可得到调节望远镜筒下的俯仰螺钉,绿十字像位置的改变量,以及转动双面平面镜,反射光的角度变化等数学关系,然后通过C#编程控制调节附件、辅助线、 光线与光学元件,通过分光计载物台之间的层级、从属、运动关系,准确模拟了同轴等高调节时的操作,并以光路跟随的形式直观地展示了上述过程,方便学生学习.
图10(a)为调节俯仰螺钉,使望远镜筒向下倾斜时的光路变化及绿十字像位置变化;图10(b)为调节载物台下的俯仰螺钉,使载物台向上倾斜时的光路变化及绿十字像位置变化;图10(c)为转动双面平面镜时,反射光的光路跟随变化. 整个模拟过程直观清晰,方便学生学习调节. 使学生有效地掌握课堂实验中具体操作的要领.

(a)调节俯仰螺钉使望远镜筒向下倾斜
仪器调节好后,进行数据测量,因此系统也实现了测量结果的自动判读供学生练习. 例如,分光计采用双游标读数,根据游标原理制作了高精度的游标刻度,并通过脚本编程,实现了准确真实的游标读数仿真及测量,如图11所示. 学生不仅可以自行进行游标读数练习,还可以将数据与系统给出的结果进行对比,判断读数的准确程度,提高了交互功能. 类似功能在其他仿真系统中也已经实现,如图9所示的千分尺结果自动显示功能.

图11 分光计游标盘、刻度盘及读数测量的仿真
3 虚拟仿真系统在教学中的实践
从学生使用角度出发,编写了虚拟仿真系统使用说明,增添了语音讲解与字幕对白并与仪器实体展示相呼应. 目前,开发的实验仪器仿真系统已投入本校的基础物理实验教学,具体应用在学生预习、教师课堂教学讲解及课后复习阶段. 特别是在预习阶段,设置了针对仪器结构、原理及操作的预习问题,要求学生操作仿真系统后回答,使得仿真系统的学习更有针对性,学生、教师反映良好.
仿真系统具有以下特点:
1)易学性. 学生利用该系统,不仅可在三维空间中直观地认知仪器各部件的构造及其对应的物理原理,也可以模拟操作仪器,练习各种调节功能,有效克服抽象思维能力不足的缺点,为课堂原理学习、仪器的真实操作打下坚实基础;
2)易用性. 教师利用该系统,在课堂教学中可以更高效地讲解仪器的原理及操作,显著降低了教学的难度;
3)先进性. 虚拟软件在先进的优秀软件平台Unity 3D上开发,不仅能体现整个模型、仪器的不同视角图,而且能单独体现模型、仪器的不同部位的内外部的不同视角,在不同平台上也具有良好的移植性.
4 结束语
物理实验仪器虚拟系统体现了“易学性、易用性、先进性”的特点,创建了虚实结合的实验教学新模式,有效解决了“教师难教,学生难学”的教学难题. 随着信息技术的快速发展,虚拟现实技术作为新的教学手段正逐步进入教育领域,特别是新冠疫情的出现,使得在线教育成为必然趋势,如何保障在线教育的质量非常关键. 而虚拟现实技术是提高在线教学效果的有力手段. 对于量大面广的基础实验课程,开发基于虚拟现实技术的三维虚拟物理教学仿真系统,对保证、提高线上线下的大学物理实验教学,实现教育现代化具有重要意义.
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
现代仪器与医疗(2022年2期)2022-08-11
一重技术(2021年5期)2022-01-18
兵器装备工程学报(2021年12期)2022-01-11
保健医苑(2020年1期)2020-07-27
数学物理学报(2019年1期)2019-03-21
脊柱外科杂志(2019年6期)2019-03-05
百科探秘·航空航天(2017年12期)2018-01-31
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16
中华骨与关节外科杂志(2016年6期)2016-05-17