干扰环境下飞行器的识别与跟踪技术研究
2021-11-29 02:17罗惠中刘媛媛
沈阳理工大学学报 2021年5期
李 环,罗惠中,刘媛媛
(沈阳理工大学 信息科学与工程学院,沈阳 110159)
在空战中,为在敌方战斗机释放干扰弹等进行人工干扰的情况下仍能够对战斗机进行精确的识别和跟踪,需要采用相关的技术。利用卷积神经网络[1]对图像的特征进行建模,可使目标识别更加准确;利用粒子滤波器[2-3]可实现对目标的跟踪,粒子滤波器以贝叶斯准则和重要性采样为理论基础,其首先对粒子进行初始化,然后根据粒子上一时刻的位置和权重对粒子的位置进行更新以及重要性采样。战斗机在军事活动中为了能够更好地躲避追踪,一般会采用比较贴近其飞行环境的颜色,如银白色、灰色等,由于其颜色比较单一,为实现跟踪提供了可能。
针对飞行过程中战斗机识别和跟踪的研究已有很多。许来祥等[4]结合红外目标特性,调整ZFNet的卷积层和池化层数量,加入空间变换网络以提高对数据变换的鲁棒性,对Dropout 层的丢弃率变化进行可视化分析并确定选取原则,以提高红外目标的识别率。刘刚等[5]利用模糊C均值聚类算法,将经过降噪处理的红外飞机图像分割成背景、飞机机身和尾焰三部分,分别计算飞机目标的Hu矩和归一化转动惯量来构成组合不变矩,同时结合分割图像的面积比特征来实现飞机飞行姿态的识别,通过对飞机机头、机轴、机翼或尾翼的提取并依照相应的比例关系,实现对飞机关键攻击部位如驾驶舱的识别。刘聪聪等[6]提出改进的基于区域卷积神经网络Faster R-CNN的空中飞行物识别算法,使用消色差折射式望远镜ETX80和个人电脑构建空中飞行物识别系统。吴雪刚[7]为解决运动中的遮挡问题,在粒子评价过程中引入“运动动量因子”来保持在高速运动下原来方向粒子的健壮性,提高了粒子跟踪的准确度,为运动目标建立颜色模型,使跟踪的效果优于基本粒子滤波器。赵春梅等[8]提出了基于多域网络的改进网络,即用于飞机跟踪的快速深度学习的跟踪网络,使用迁移学习弥补目标跟踪的小样本缺陷,基本满足飞机实时跟踪。
大多数目标识别与跟踪的研究中不考虑人为干扰因素,尤其人为干扰条件下战斗机识别与跟踪方面的研究相对较少。本文利用卷积神经网络算法对战斗机进行识别,利用粒子滤波算法通过颜色特征对战斗机进行跟踪。
1 卷积神经网络的目标识别
将需要识别的图像送入卷积神经网络[9]模型之前,对图像库中所有包含战斗机的图像标签化分类[10]。然后使用切片函数将图像与对应的标签组成一个元组,将所有元组随机打乱顺序、复制多次后,按照4∶1的比例分配给训练集和测试集,其目的是增加训练的随机性,提高训练精度。根据仿真实验的需求,构建如图1所示的网络模型[11]。
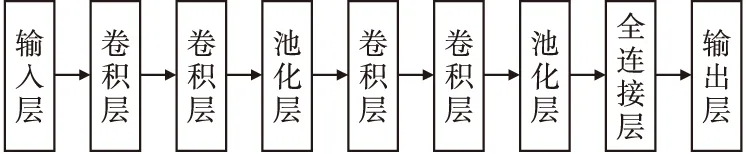
图1 网络结构
由图1可见,第一层为输入层。输入层能够接收输入的图像,并利用几何变换将输入图像大小统一为256×256×3,并将几何变换后的图像传送给第二层。
第二层为卷积层。设定卷积核的大小为3×3、步长为1,将其与进入到卷积层的图像所对应的局部亮度值进行卷积,然后按照步长对卷积核进行上下左右平移,最终实现卷积核与整幅图像的卷积,卷积后的结果按照顺序排列,构成一个新的矩阵,该矩阵也叫特征图,被送至下一层。卷积公式为
(1)
式中:ai,j为特征值;i和j分别为每次卷积后得到的特征在新的特征图中所对应的行坐标和列坐标;xi,j为输入图像对应点的亮度值;wm,n为卷积核的对应值;wb为偏置。
第三层仍为卷积层。经过一次卷积后的特征图仍较大,为减少计算量,防止过拟合,第三层也设置为卷积层。
第四层为池化层。池化层也叫降采样层,其不仅具有平移不变性,保持特征不变,且以牺牲图像分辨率为代价省去低层的、不鲜明的特征,凸显更高层的特征。池化可分为最大值池化和均值池化,二者均需满足梯度之和不变的原则,该层使用最大值池化的方法。当大小为3×3局部感受野与特征图的对应点进行乘积运算后,保留9个数值中的最大值,去除其他8个值。
第五层至第七层的原理与第二层到第四层相似,区别在于第七层采用的是均值池化。用大小为3×3滑动窗口与特征图局部的对应点进行乘积运算后,得到9个数值,取平均值后保存。
此外,在第一层到第七层中均引入一种非线性激活函数—ReLU函数,其目的是增加卷积神经网络模型中的非线性因素,加快计算速度,避免梯度饱和,并降低过拟合问题的发生概率。
最后一层是全连接层。全连接层中仍设置激活函数。由于该仿真实验的本质是利用卷积神经网络实现多分类问题,因此使用softmax做为全连接层的激活函数。softmax可将分类问题转化为概率问题,最终选取概率值最大的节点作为输出,将其确定为预测的结果。
2 目标跟踪
2.1 颜色特征
图像识别中颜色是应用最为广泛的特征之一,主要原因是图像中需要识别的物体与场景的关系十分密切,颜色特征鲁棒性强,不受飞机的飞行姿态、拍摄视角以及尺寸等因素的影响[12]。对战斗机的图像进行跟踪的过程中,本文利用颜色距离作为颜色特征,即以每两个相邻粒子所在位置的欧氏距离来衡量图像中颜色的相似性,欧氏距离的计算公式为

(2)
式中:C1和C2分别表示两个粒子;C1,R、C1,G、C1,B分别代表粒子C1的三个通道;C2,R、C2,G、C2,B分别代表粒子C2的三个通道。
2.2 粒子滤波器
自Bootstrap滤波器出现,粒子滤波(Particle Filter,PF)[13]迅速成为一种重要的非线性递归贝叶斯滤波方法,因其不受系统方程和系统噪声限制,应用广泛,可扩展性强。
2.2.1 粒子滤波器的跟踪原理
粒子在任意状态下的空间模型为
xn+1=f(xn,wn)
(3)
yn=h(xn,vn)
(4)
式中:xn为n时刻的状态;yn为观测值;wn为动态噪声和过程噪声;vn为观测噪音;f为状态转移函数;h为测量函数。
为后续计算方便,设
Xn=x0:n={x0,x1,…,xn}
(5)
Yn=y1:n={y1,y2,…,yn}
(6)
从贝叶斯的角度分析,跟踪问题的本质就是从Yn中推导出当前时刻状态xn的可信度,即后验概率密度P(xn|Yn)。
假设系统的状态转移服从一阶马尔科夫模型,并且在n-1时刻的概率密度函数为P(xn-1|Yn-1),则预测状态xn出现的概率为
(7)
式中P(xn|xn-1)由系统决定,其概率分布情况与系统的过程噪声wn分布一致。
利用预测的先验概率密度P(xn|Yn-1)对后验概率P(xn|Yn)进行更新,公式为
(8)
式中:P(yn|xn)为似然函数,由观测方程决定,只和观测噪音vn有关;P(yn|Yn-1)为归一化常数。
(9)
对基于粒子滤波算法的跟踪系统而言,求出后验概率十分困难,故使用蒙特卡洛采样法,后验概率可表示为
(10)

(11)
(12)
(13)

2.2.2 基于粒子滤波器的颜色跟踪
粒子滤波器的跟踪流程[14-15]包括初始化阶段、搜索阶段、决策阶段和重采样[16]阶段。
在初始化阶段,设定提取战斗机的颜色特征,设定颜色方差为25,且使6000个粒子均匀分布在第一帧图像中;在搜索阶段,根据初始化阶段6000个粒子的位置,计算出每个粒子的颜色特征;在决策阶段,对每个粒子的颜色特征进行加权,求出每个粒子与目标颜色之间的相似性;在重采样阶段,依据决策阶段求出的每个粒子与目标颜色之间的相似性,在新一帧图像中,粒子相似性较高之处多放置粒子,在相似性较低之处少放置或不放置粒子,重新进行搜索阶段和决策阶段。
3 目标跟踪
3.1 战斗机识别算法的仿真实验结果
通过仿真实验得到识别准确率、损失率与迭代次数之间的关系如图2和图3所示。
由图2和图3可以看出,随着迭代次数的增加,利用卷积神经网络技术的目标识别准确率逐渐升高,最终接近于1。损失率随着迭代次数的增加逐渐降低,最终接近0。
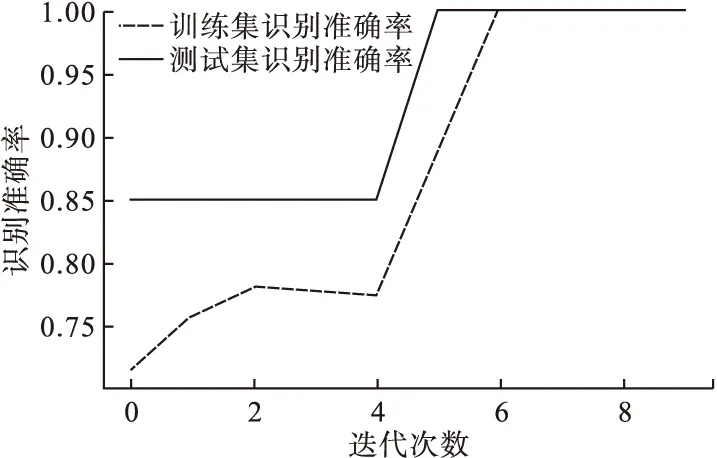
图2 训练集和测试集的识别准确率
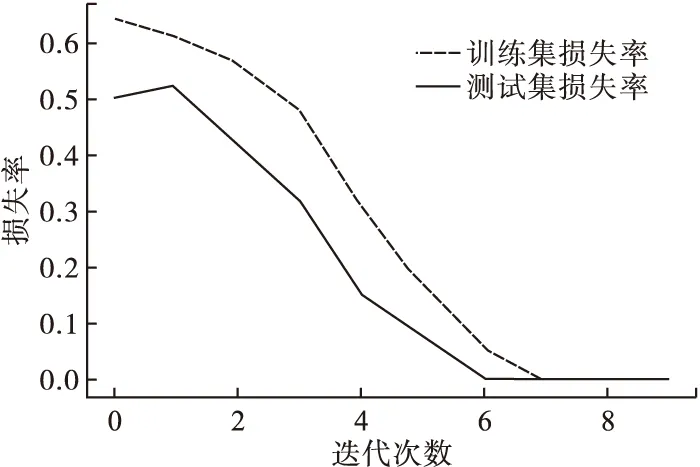
图3 训练集和测试集的损失率
为便于对比,另外采用方向梯度直方图(Histogram of Oriented Gradient,HOG)特征的支持向量机(Support Vector Machine,SVM)识别算法[17]和最近邻(K-Nearest Neighbor,KNN)算法的图像识别算法[18]进行战斗机图像识别仿真实验,三种方法的识别准确率对比结果如表1所示。
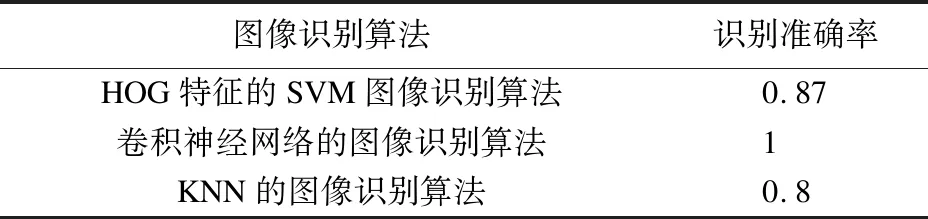
表1 三种识别算法的识别准确率对比表
由表1可见,本文采用的卷积神经网络的图像识别算法的识别准确率明显高于其他两种算法。
3.2 颜色特征的战斗机跟踪仿真实验结果
通过仿真实验,选取其中第32帧、第305帧、第628帧及第779帧的图像来查看跟踪效果。跟踪图像如图4所示。
由图4可见,选取的四帧跟踪图像中,粒子基本实现了对战斗机的跟踪,即使干扰弹对战斗机产生了部分遮挡,跟踪效果也较好。
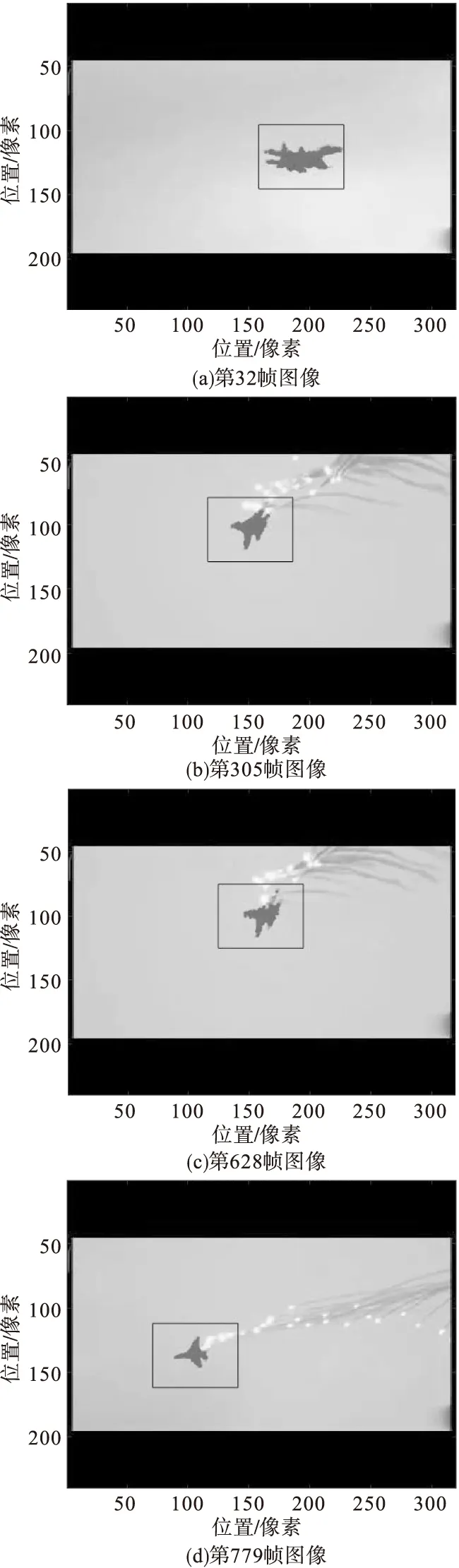
图4 粒子跟踪图像
4 结论
在战斗机图像识别中,采用基于卷积神经网络的目标识别算法。仿真实验结果表明,基于卷积神经网络的目标识别算法的准确率接近于1,识别效果较好。
根据颜色特征利用粒子滤波器实现对战斗机的跟踪。仿真实验结果表明,敌军战斗机在释放干扰弹的过程中,会对战斗机产生部分遮挡,但未被遮挡部分的颜色特征依然存在,不会影响识别效果。使用粒子滤波器的过程中,设定的粒子越多,计算量越大,此为粒子滤波的不足之处,后续研究中需要采用更好的跟踪技术。
猜你喜欢
客联(2022年4期)2022-07-06
成都信息工程大学学报(2022年2期)2022-06-14
昆明医科大学学报(2022年1期)2022-02-28
军事文摘(2021年17期)2021-09-24
中学生数理化(高中版.高二数学)(2020年1期)2020-02-20
电子制作(2019年11期)2019-07-04
分析化学(2018年12期)2018-01-22
飞碟探索(2015年8期)2015-10-15
电子设计应用(2004年9期)2004-09-17
航空知识(2001年5期)2001-06-12