
大型火电机组低负荷运行辅机跳闸控制的探讨
2021-11-28 15:05沈彬赵阳徐小雷王文鑫
科技资讯 2021年21期
关键词:风机
沈彬 赵阳 徐小雷 王文鑫
摘 要:该文阐述了大型火电机组低负荷辅机跳闸摸底试验的开展过程,对相关结果进行了分析,找出了低负荷辅机跳闸的特点以及当前控制机制的不足之处。在此基础上,围绕风机、制粉系统两大辅机的优化跳闸控制方式进行了分析,并对此种优化方式是否具备实用价值展开了结果论证。最终结果表明,该文基于大型火电机组低负荷工况下辅机跳闸发生原因而提出的解决方式具备可行性。
关键词:大型火电机组 低负荷运行辅机 跳闸控制 风机 制粉系统
中图分类号:TM621 文献标识码:A文章编号:1672-3791(2021)07(c)-0034-03
Abstract: This paper describes the development process of low load auxiliary tripping test in large thermal power units, analyzes the relevant results, and finds out the characteristics of low load auxiliary tripping and the shortcomings of the current control mechanism. On this basis, the optimal trip control mode of fan and pulverizing system is analyzed, and the practical value of this optimization mode is demonstrated. The final results show that the solution proposed in this paper based on the causes of auxiliary machine trip under low load conditions of large thermal power units is feasible.
Key Words: Large thermal power unit; Low load operation auxiliaries; Trip control; Fan; Pulverizing system
火力发电机组是指以煤炭、油类、可燃气体等作为燃料,在燃烧的过程中释放化学能,将之转变为热能,进而对锅炉内的水进行加热[1]。当水转变成水蒸气之后,通过加压的方式,引动蒸汽推动汽轮机,将热能转化为机械能,最终转化为电能,完成发电。目前,我国大型火电机组低负荷运行辅机的跳闸控制水平不甚理想,需围绕优化控制方式进行讨论。
1 大型火电机组低负荷辅机跳闸摸底试验
1.1 试验目的
此次试验的主要目的在于:第一,探明低负荷工况运行状态下,大型火电机组辅机一旦出现跳闸情况,将会对整个机组的运行状态产生何种影响。第二,目前使用的低负荷工况辅机跳闸自动化控制系统的实际效果[2]。此次用于試验的机组当量达到500 MW。
1.2 试验相关过程及结果分析
1.2.1 试验相关过程
此次试验开展过程中,风机、给水泵均进行双侧运行,主要开展风机(包含送风机、引风机)和制粉系统的跳闸试验。具体内容为:第一,实验开始前,准备5台中速磨煤机、整个机组的负荷控制在500 MW,远小于机组额定负荷。第二,跳闸的发生均由技术人员手动控制(即在保持辅机低负荷运转的情况下,由技术人员通过切断电源等方式,迅速使目标辅机设备跳闸)。第三,自动化辅机运行控制系统正常启动,在跳闸(技术人员手动)发生后,自动控制系统后续发生的所有自主调节过程均不再施加人工干预,无论出现什么样的调整均由系统自主运转而决定。
1.2.2 试验结果分析
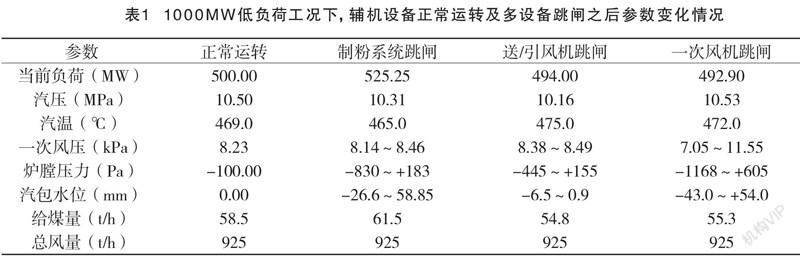
大型火电机组辅机设备在500 MW的低负荷状态下运行的常态参数、制粉系统跳闸后、送/引风机跳闸后、一次风机跳闸后的各项参数对比情况如表1所示。总体而言,制粉系统、送/引风机、一次风机跳闸之后,机组当前总负荷并未出现明显变化,变化上限为525.25 MW,下限低至492.90 MW,均处于安全范围内。此外,根据表1下方备注情况可知,某些参数会在短时间内骤然发生较大变化,但平均值与正常值相比几乎不存在任何差异。该结果表明,即使某项参数发生了巨大的变化,但此种变化会在短时间内迅速衰减,故对均值造成的影响几乎可以忽略不计。
造成该试验相关结果的主要因素可能出现在如下方面:第一,辅机跳闸后的负荷变化过程变化趋势不明显,是因为机组原本便处于低负荷的工况之下,如风烟系统中,单侧风机即使跳闸,其余风机依然能够正常运转,并保证机组的整体运行不受影响。第二,由表1可知,制粉系统跳闸之后,对机组负荷造成的波动最大(相较于风机而言)。可能原因为:处于低负荷工况状态下,单套制粉系统占据的燃料量比例较大,一旦跳闸,产生的损失也较大,故对机组整体负荷造成的影响也较大。
2 大型火电机组低负荷运行辅机跳闸控制优化设计
2.1 低负荷风机的跳闸控制策略
根据上文试验结果以及对RB控制模式进行综合思考后,该文在低负荷工况下,风机跳闸控制方面提出一种新的流程。具体而言:第一,初始状态的第一次判定内容保持不变,即“对侧风机出力是否提升”,如果判定为“是”,则应对风机进行如下调整:(1)即刻对风机进行整体(超驰)控制;(2)根据运行工况、动态超驰实际情况,对风机开度进行提升处理;(3)调节参数,并根据当前的实际工况完成对PID参数的调整。上述环节完成后,针对判定“对侧风机出力是否提升”的“是”判定的处理宣告完成,之后的处理机制与判定为“否”的机制完全一致。第二,判定为“否”后,需要将协调控制方式切换为“汽机跟随模式”,之后应保持锅炉侧的出力状态不变,对汽机侧进行气压控制,使跳闸后机组的主要参数在短时间内逐渐稳定,并逐渐恢复至跳闸前的状态[3]。
由于运行状态处于低负荷工况,故当辅机跳闸时,整个机组的出力情况几乎不会受到影响。由此导致的后果是,低负荷工况的常规RB控制机制不会被触发。以此为基础进行调整时,因为低负荷段多个参数的稳定性不足,且在跳闸时会出现较大的变化,故会对机组的整体运行产生影响。因此,需要仿照高负荷工况跳闸时的RB控制机制进行协调调整。具体而言,辅机跳闸后,系统发出警报后,需要在第一时间将锅炉方面的控制从“自动”转换为“人工”,并维持当前的出力情况不变[4]。
2.2 制粉系统跳闸控制策略
根据表1显示的数据可知,在低负荷工况下,制粉系统跳闸后,对机组当前运行状态造成的影响最大。但有资料显示,如果在高负荷工况下,制粉系统跳闸后对机组当前运行状态造成的影响却最小。造成此类差异的直接原因在于:在高负荷工况下,同时投入使用的制粉设备数量较多,其中一台设备(一个子系统)跳闸时,燃料量方面的损失的整体占比较低;而在低负荷工况下,同时投入使用的制粉设备数量可能仅有2~3台,故其中一台出现跳闸情况时,燃料量可能瞬间损失1/3~1/2的占比,故对机组设备整体产生的影响较大[5]。明确原因之后的制粉系统跳闸控制策略在于:(1)必须保证制粉系统出力效果不变;(2)使用逻辑连锁投运底层油枪,帮助辅助稳燃[6]。
3 结语
根据上文所述的方式对大型火电机组低负荷运行工况下的辅机跳闸控制机制进行调整后,最終结果显示(送风机跳闸):负荷、主汽压、主汽温等参数在跳闸前后的具体数值,经过SPSS 25.0统计学软件行比对处理后,P>0.5,表明所有参数的差异极小,没有统计学意义。由此可见,该文所述的控制调整方式具备可行性。
参考文献
[1] 陆陆,韩峰,钟文晶,等.大型火电机组低负荷运行辅机跳闸控制策略研究[J].自动化仪表,2020,41(11):70-75.
[2] 吴启光.火电机组变负荷运行特性及节能优化控制系统分析[J].电力设备管理,2020(2):70-71,96.
[3] 刘晓慧.火电机组超低负荷运行稳定性分析及控制系统优化[D].北京:华北电力大学,2018.
[4] 虞国平,张新胜,屠海彪,等.火电机组深度调峰工况辅机安全控制技术研究[J].浙江电力,2021,40(2):85-90.
[5] 孔祥华.火力发电厂重要辅机油站电源可靠性分析与改造[J].神华科技,2018,16(2):43-44,51.
[6] 陈欢乐,归一数,费章胜,等.火电机组低负荷磨组运行方式及控制优化[J].锅炉技术,2020,51(6):63-67.
猜你喜欢
机电信息(2022年9期)2022-05-07
中国水运(2022年4期)2022-04-27
内燃机与配件(2021年8期)2021-05-28
科学导报·科学工程与电力(2019年28期)2019-10-21
名城绘(2019年3期)2019-10-21
科学导报·科学工程与电力(2019年13期)2019-10-21
中国化工贸易·中旬刊(2018年6期)2018-10-21
神州·中旬刊(2018年6期)2018-06-27
能源研究与信息(2015年3期)2015-11-18
科技与企业(2015年16期)2015-10-21
