
子母无人机释放回收装置
2021-11-22 01:17:47王裕雯谢汶霖谭祺兴何民安陈燕婷
科技信息·学术版 2021年17期
王裕雯 谢汶霖 谭祺兴 何民安 陈燕婷

摘要:此前无人机应用领域提出了集群化无人机的应用概念,目的是将单一无人机具有的优势结合,取长补短能更好的完成无人机执行的任务。目前无人机编队等也属于多无人机协同作业,但并未达到无人机集群化的使用需求,因此,子母机搭配协同作业的研究对多无人机协同任务分配具有重要意义。通过在目前无人机平台中寻找合适的子机与母机,利用机械装置等硬件将之结合起来,搭载不同的飞控来控制子母机执行不同的任务。
关键词:集群化无人机;子母无人机;机械装置;分开控制
引言
无人机作为新崛起的新兴行业,因为其应用范围十分广泛,近年热度持续增高。目前例如大疆无人机具有较高的稳定性与便捷的操纵性,近年来也出现有无人机编队表演等无人机编队产品,但其存在着使用维护繁琐、使用环境苛刻、实用性欠佳等方面的缺陷,并未实现真正意义上的无人机集群协同化。
因此,本文提出了一种子母机的设想,即六轴多旋翼飞行器可搭载四旋翼飞到目标区域,在悬停状态下通过释放装置将四旋翼飞行器释放并分别进行侦察任务,避免因为目标过于分散而无法完成任务的情况出现。该套子母无人机释放回收装置具有通用性,可搭载在具备一定载荷条件范围的母机平台上,可实现子无人机的释放与回收,为完成复杂条件下多无人机动态协同执行任务打下前端基础。
1 选定子母机平台
1.1 母机选取
对于子母无人机的设计,需要从任务需求入手,通过子母机的结构、性能等方面设计系统。首先通过子母机进行搜救任务入手,母机搭载子机到达救援地点,因母机体型较大,险峻地势无法执行侦查任务,搭载的小型子机可以在狭窄的山谷等地侦查,或者搜救区域较大,母机无法独自完成搜救侦查任务,可以派出子机来配合作业。对于母机的选取,我们应该考虑以下几个方面:①载重能力②续航时间较长③稳定性,充分考虑了母机自身也要具备便携性、灵活性等特点,我们选择大疆S900作为母机搭载平台。
S900使用V型六旋翼设计。它的构件使用了碳纤维复合材料,能够使无人机的机身达到所需的强度,同时最大的减轻重量。大疆S900整机重量3.3kg,是因为采用了轻量但坚固的碳纤维材质,拥有能够伞形折叠的V型六轴结构,云台采用下沉设计,所有机臂均可以向下折叠,GPS则有单独的折叠座,因此整体十分轻盈便捷,携带时可以收起机臂、螺旋桨和GPS,减轻了携带时的不便。拥有独特的可拆卸的上中心板,在更改整机的动力系统、控制系统时十分快捷。动力系统方面采用采用最新款的4114电机,最大功率500W,配合6s电池、40A电调能达到单轴最大2.5kg的推力,满足母机的基本条件。
1.2 子机选取
子机选取过程与母机类似,从需求入手,有母机作为可移动平台。选用子机的标准是轻巧、稳定性好。因此,选用大疆Mavic 2 Pro。御2是一款主打便携的无人机,性能出色,具有很好的机动性和飞行控制系统。它采用三轴机械云台,可以360°全方位感知,工作环境温度在-10°—40°之间,能够适应恶劣环境。整机重量734g,最长飞行时间为31分钟。这架无人机十分符合设计要求,作为子机再合适不过。
2 机械装置的设计
机械装置设计在符合设计需求的前提下,满足理论力学、材料力学、机械设计理论以及空气动力学等理论设计理论。通过理论设计及数理验证,利用CATIA专业机械设计软件进行建模分析,为机械结构提供设计导向,使机械设计达到理论设计需求。
初始的设计方向为母机可折叠的机械臂,用来抓取子机。但在空中,机械臂加上子机对母机整体的空气动力影响较大,且重量也大,这无疑为母机的驾驶操纵带来困难。为了解决这一问题,可以使用延伸平台。將平台固定在母机的上方,在平台上再搭建一个方舱用来存放子机,采用软连接的方式固定子机。方舱的目的是能在释放子机时,避免被母机的下沉气场所影响。也保证了子机精确悬停的精度范围,最大限度的提高释放与回收的成功率。
2.1 延伸平台设计
选用的母机最大载重约为4.9kg,完全足够搭载子机到达指定地点,并且拥有可拆卸的上中心板,能够实现将延伸平台固定在母机上中心板。因为子机存放必须保证展开状态,因此舱体相比于母机中心板设计的较大,不能将延展平台设计过高,会影响母机的平衡性。母机的机臂有一定上倾角,暂将平台设计离母机上中心板15mm,选用连接件为铜柱,因为其硬度相比吕柱更大,能更好的支撑子机。通过铜柱将延伸平台固定在母机上,选用M3*15+3的规格。母机上中心板的孔位大小为22mm,适合用M3大小的螺丝。延伸平台要能保证母机上中心板和方舱皆能固定在平台上,大小为210*170*2,通过切割2mm碳板来制作,来保证其强度。
2.2 方舱设计
方舱为一个盒体设计,厚度为2mm,为了保证质量不会过大从而影响母机飞行,采用环氧树脂板,在强度足够的同时质量也轻。因为子机水平悬停精度极限值约为0.3m,子机大小为322×242×84 mm,为了保证能够成功使子机起飞降落,方舱设计成350×270×100mm,方舱地面按照平台设计的孔位打孔,方便方舱与延伸平台相固定。方内侧放有海绵等软性材料,作为缓冲和固定的作用,避免搭载的子机因为左右碰撞而产生损坏。
方舱盖的设计采用同样的材质。要控制方舱盖的开合,使子机正常起飞,在方舱侧面用舵机架固定一个大扭力金属齿舵机,将舵机机臂与方舱盖相连,控制舵机旋转,舵机带动盖子旋转一定角度,暴露出内侧的子机。
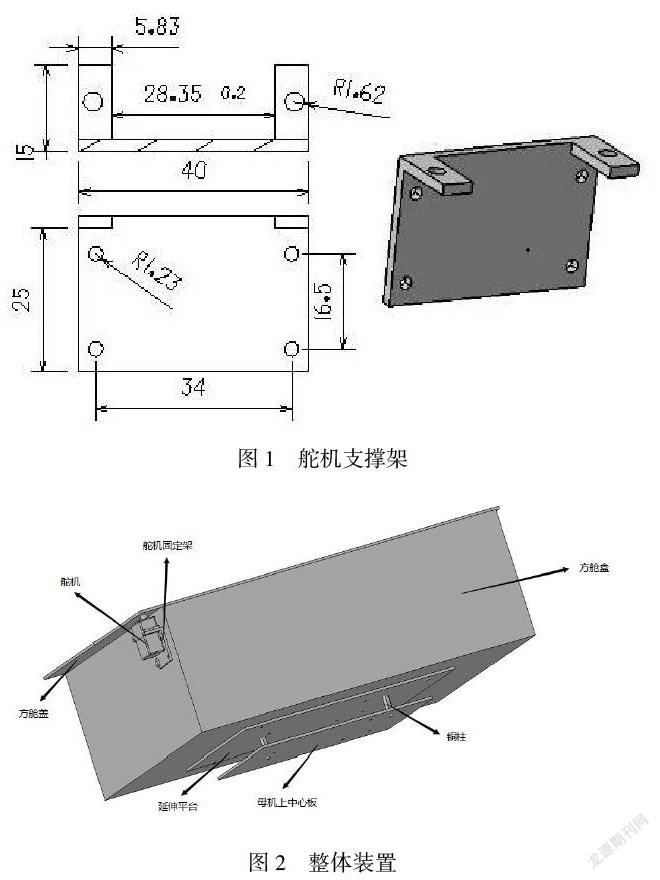
2.3 舵机支撑架设计
舵机选择银燕ES3054,该舵机扭力大,完全能够带动顶部盖子的旋转挪动。设计一个可以将舵机工固定在方舱外侧的舵机支撑架,如图1,将舵机卡入支架开口处,舵机耳朵与支架顶面固定,支架侧面按照孔位固定在方舱侧面,支撑架选用3D打印机制作,使用树脂等材料打印即可满足需求。
为保证舵机臂与方舱顶的顺利连接,方舱顶的设计要略大于方舱底部,大小设计为350×290×2mm,控制舵机转动90°带动顶盖产生偏移,舵机与接收机相连相连接,利用遥控器开放新的通道来控制舵机,需要飞手来控制。
2.3.1 舵機控制
数字伺服器是舵机控制的动力源,舵机的控制信号是PWM信号,利用微处理器的数字输出对模拟电路进行控制,控制电路接收信号源的控制信号并将电机输出扭矩放大相应倍数,然后输出。电位器和齿轮组的末级一起转动,测量舵机转动角度。电路板检测并根据电位器判断舵机转动角度,然后控制舵机转到相应目标。[1]
3 多机协同控制系统
3.1 具体操作
多无人机协同控制简要概括就是多个无人机按照相应的控制方法完成指定的任务。其中,按照不同的无人机任务标准对无人机进行划分,可将协同控制方法分为一致性控制、编队控制以及合围控制等[3]。
因为子母机具体任务不同,采用子母机分开控制,即子机与母机分别有自己的飞控,子机御2的飞控是内置的,母机选用汉鲲的F2飞控。使用北理珠无人机实验室的多机协同控制系统。母机与子机的两个飞控分别连接到协同控制平台,由平台系统远程控制,预留可见两机的外场人员在现场,与控制系统内场实时通话,确保无人机的安全,若发生意外情况由外场人员接管无人机的操控工作,优先级别高于控制系统。
3.1.1 子机释放与回收
图3为该系统的控制图。其中,指挥员明确此次无人机飞行任务的具体内容和特点,进行岗位人员分配,提出具体要求,在下达任务前进行内场和外场飞行前准备,确保设备运行前处于良好状态,准备完毕后内外场需分别向指挥员报告。外场无人机登录遥控器账号,因为子母机的飞控不同,内场云平台需要分别接管子机母机并分别上传航线。指挥员下达任务后命令起飞,内场操作员控制平台先给母机发送控制指令,母机在平台全自动控制下正常起飞,规划的航线使母机在指定位置悬停,控制舵机旋转角度,打开舱门,在由平台发送起飞指令给子机的飞控,让子机在方舱内完成起飞动作,实现子机的释放。平台分别控制两机完成不同任务再回到指定地点。回收子机时,控制母机悬停在指定位置,但是因为子机飞控水平精度过大,直接由飞控回收难度较大,若外场观察员注意到子机回收有困难,告知外场飞手,外场飞手接管子机,能最大限度的保证子机回收成功。
4结语
本文通在现有无人机平台中根据需求选择合适的子母机,通过给母机设计一种连接机械装置,搭载子机并释放与回收,再通过多机协同控制平台完成多任务分配,初步实现了子母无人机协同作业。
参考文献
[1]胡彬,郭小燕,等.基于Arduino的智能共享系统[J].电脑知识与技术,2019,15(29):280-282.
[2]刘胜南,李乔,陆宁云,等.一种微型电动无人机续航时间的估算方法[J].第26届中国控制与决策会议(2014 CCDC)论文集,2014.
[3]韩亮,任章,董希旺,等.多无人机协同控制方法及应用研究[J].导航定位与授时,2018,5(04):1-7.
