
分层施肥机作业监测系统的设计与田间试验
2021-11-19 07:37陈金成张惠汤智辉张景纪超
江苏农业科学 2021年20期
陈金成 张惠 汤智辉 张景 纪超

摘要:为解决分层施肥作业过程中难以人工判断缺肥或堵塞等问题,并根据施肥作业实际需求,设计开发了一种分层施肥监测系统,解决了传统施肥作业无法实时监测机具作业状态和可视化操作的问题。以三菱FX2N PLC及外围电路进行传感器输入信号的采集,采用适配modbus协议的LoRa无线扩频技术实现了与上位机的无线数据通信,减少了现场布线。通过人机交互界面进行相关参数设置,为不同机型机具进行系统的移植提供了方便。选取了穿透性强、辐射角度广的对射式光电传感器实时监测施肥流动状态。在机具地轮处安装霍尔传感器并可依据安装磁钢的数量提高作业速度的精度,从而提高作业面积的数据准确性,也为故障位置信息记录提供可靠保障。田间试验表明,该监测系统可有效监控分层施肥作业状态,人机交互良好,系统稳定性高,满足复杂农业中的作业要求,可以实现100%缺肥或堵塞等故障报警,作业面积统计误差小于0.05%,可以实现分层施肥作业的监测目标。
关键词:分层施肥;监测系统;故障报警;设计;田间试验
中图分类号:S224.2 文献标志码: A
文章编号:1002-1302(2021)20-0205-05
收稿日期:2021-01-26
基金项目:新疆生产建设兵团中青年科技创新领军人才计划(编号:2018CB010);国家重点研发计划(编号:2016YFD0200604);兵团英才第二周期第二层次培养计划项目。
作者简介:陈金成(1986—),男,河南商丘人,博士研究生,助理研究员,主要从事农产品无损检测与智能控制系统开发研究。E-mail:shznkycjc@163.com。
通信作者:纪 超,博士,研究员,硕士生导师,主要从事大田农机装备信息感知与控制系统开发研究。E-mail:jicobear@163.com。
“减肥增效”是推动农业绿色可持续发展的重要组成部分,分层施肥技术能够将较适量的肥料施于不同的土壤层中以提高肥料利用率,延长肥效,促进作物后期的生长[1-3]。目前,该技术已在棉花、玉米和小麦等作物开展应用,并取得了良好的施用效果 [4-7]。分层施肥机是实现分层施肥作业的硬件载体,主要通过核心部件施肥靴完成下肥动作。大田恶劣作业环境下,常出现因排肥机构传动故障、杂草湿土堵塞施肥靴排肥口等引发堵肥、漏肥问题,由于后续紧跟覆土环节,故依靠人工随车观测难以及时察觉,造成断条漏施,嚴重影响后期施肥效果以及作物产量。
为实现堵肥、漏肥报警与作业参数监测,国内外相关学者研究了光电感应、电容感应、机器视觉等方式进行实时监测[8-16]。实际农田非结构化工况条件下,光电传感器价格低廉、技术成熟,应用较为广泛,但探头表层极易受尘土粘附干扰,削弱感应灵敏度;电容传感器对种肥流量具有一定的响应效果,但监测精度同样易受温度、灰尘、震动等多种外部因素影响;视觉相机监测能力能够达到像素级别,但造价成本高,且易被杂光侵入,影响成像效果。因此,考虑实际大田推广应用前景,本研究拟采用具有较强尘土穿透能力的光电传感器实时感应肥料施用过程,即在降低成本的基础上,提高抗干扰能力,保证监测精度。同时,构建分层施肥机作业监测系统,开发漏肥、堵肥报警功能,配置作业速度、断条距离测算、作业面积统计等多项功能模块,从而优化分层施肥机田间作业性能。
1 分层施肥系统结构及原理
1.1 系统组成
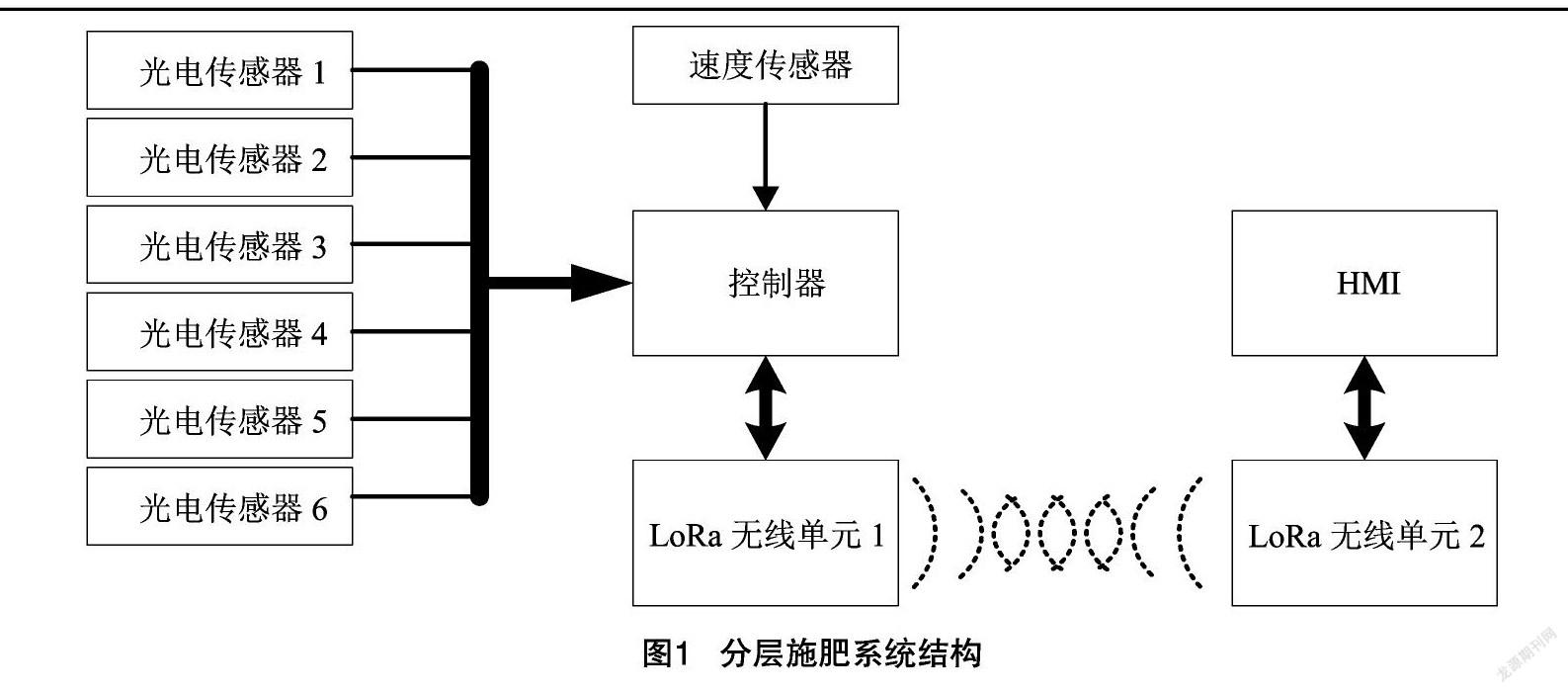
本控制系统以新疆农垦科学院机械装备研究所开发的分层施肥机为载体进行设计开发。分层施肥机主要以地轮为主动力链条传动带动施肥槽轮旋转,使肥料流入导肥管,再利用分层装置实现不同深度的施肥作业[17]。分层施肥监测系统构成包括三菱FX2N PLC控制器及外围硬件电路(下位机)和威纶通工业触摸屏(上位机),具体如图1所示。其中上位机和下位机通过适配modbus协议的LoRa无线通信技术实现,减少了现场布线,安装简便,易于调试。
1.2 监测原理
为适应施肥作业高尘环境,本系统优选山东诸城迪力科汽车电子有限公司特制开发的穿透性强、辐射角度广的对射式光电传感器作为施肥监测探头,该传感器在光信号受遮挡的瞬间产生低电平,其他工况下均保持高电平,从而提高了肥料流动性动态监测的灵敏度,实现少量、微小颗粒肥料的快速识别。传感器工作示意图、实物及其安装位置分别如图2、图3和图4所示。
2 控制系统设计
控制系统主要用于实现施肥堵漏监测与作业参数统计显示(作业速度、作业面积和作业时间等)两大功能。为减少现场接线部署工作和复杂作业环境下的硬件故障率,控制程序中多采用PLC软继电器(M)代替物理开关按钮,仅通过触摸屏虚拟按钮进行相关命令的操作。同时为了减少上位机的数据计算量,保障上下位机通信速率和稳定性,系统所需相关数据转换和计算均在PLC控制器中执行,其控制系统流程如图5所示。
2.1 施肥监测
根据监测原理可知,仅当肥料颗粒通过光电传感器对射场时产生低电平信号,其余情况均保持高电平状态。传感器输出信号端接入PLC输入端口,为满足高速施肥工况下监测需求,将输入端口设置为具有8 000 Hz的高速计数器输入可避免快速脉冲漏采,保证监测灵敏度和精度。图6为施肥监测策略,通过人机界面的“作业参数”界面预设时间参数t和t时间内产生的脉冲数n,待作业开始定时器(TN)开始计时,同时计数器(CN)开始计数t 时间内脉冲数n1,若n1≥n则计数器溢出复位定时器重新计时,计数器也同时复位重新脉冲计数;若在t时间内通过计数器采集的脉冲数n1
2.2 作业速度
本系统采用NPN型霍尔开关作为测速传感器,霍尔开关安装于支撑地轮的横梁上,地轮周边均匀贴有圆形磁铁,霍尔开关通过探测磁铁N极进行计数测速。已知圆形磁铁数为m, 霍尔开关单位时间
产生磁脉冲数为p,地轮直径为d,则可根据式(1)(2)计算获得地轮转速(n)和施肥作业实时速度(v)。
n=pm;(1)
v=π×d×n。(2)
2.3 作业面积和时间
作业面积与作业时间是客观衡量机具作业性能的重要指标。已知测速传感器(霍尔开关)产生的电磁脉冲数为P,地轮转1圈产生的脉冲数(即安装的磁铁数)为m,作业幅宽为L,作业面积为S,则作业面积计算公式为
S=πdm×P×L。(3)
当作业开始时开启控制器中的100 ms 定时器,累计其溢出次数,从而得到作业时间。
3 人机交互界面设计
本系统采用威纶通MT6071iE触摸屏作为人机交互界面的上位机载体,主要涉及数据信息采集、参数设置、数据统计和历史记录等功能。
主界面(图7)主要包括:(1)标题、日期、时间注释区。功能:主要用来显示日期和时间,并可以重启系统。(2)信息警告区。功能:当施肥各路出现故障时,动态滚动提示各路報警状态。(3)数据显示区。功能:设置单元作业名称,此功能主要是针对须要记录标注性的作业参数的情况,根据需求可以设置也可以不进行设置,须要与操作区“开始单元作业”和“结束单元作业”按键结合使用此功能;显示实时作业速度、自开机不间断作业面积和作业时间。(4)报警提示。功能:绿色表示工作正常,当作业时监测到堵塞或缺肥情况显示为红色。(5)单路控制监测区。功能:每一路监测均可独立控制,当按钮显示为深绿色时可进行监测,当设置为不需要监测时显示红色。(6)操作区。功能:“开始作业”,作业开始时须要通过按下此按钮切换为开始作业模式,并当作业速度大于0时监测系统开始工作,当再次按下此按钮时监测系统停止监测。“菜单设置”,当按下此按键时将弹出一个按键列表(图7右侧),可以在按键列表中点选不同的按键并弹出不同的窗口,进行参数设置或历史数据查询等功能。
3.1 参数设置和历史作业
参数设置(图8)主要根据不同的作业机具进行各个参数的调整和变更,此页面可以记录不同的作业参数和显示当前或记忆上次设置的工艺参数。此页面可以通过“新增参数” “更新当前参数” “删除当前参数”和 “删除全部参数”功能按钮管理配方数据库中的数据;待选中参数配方表中某一行参数时可通过“参数传送”按钮写入控制器。
历史作业(图9)用来记录单元作业相关数据,每天更新1次记录,项目包括编号、时间、日期、作业项目、作业面积、单元作业所需时间(单位小时和分钟)和本季度总作业面积;根据系统存储的要求可以对历史作业记录进行删除和复写操作。
3.2 报警及故障位置记录
报警记录(图10)模块是记录施肥作业过程中,第X路或多路故障的历史信息,主要用于显示故障发生的时间、类型、次数和累计时间等,便于后期查看和数据分析,有助于机具性能优化改进。为便于信息查询,提供了3种信息筛选按钮(显示所有事件、隐藏确认时间和隐藏恢复事件)。
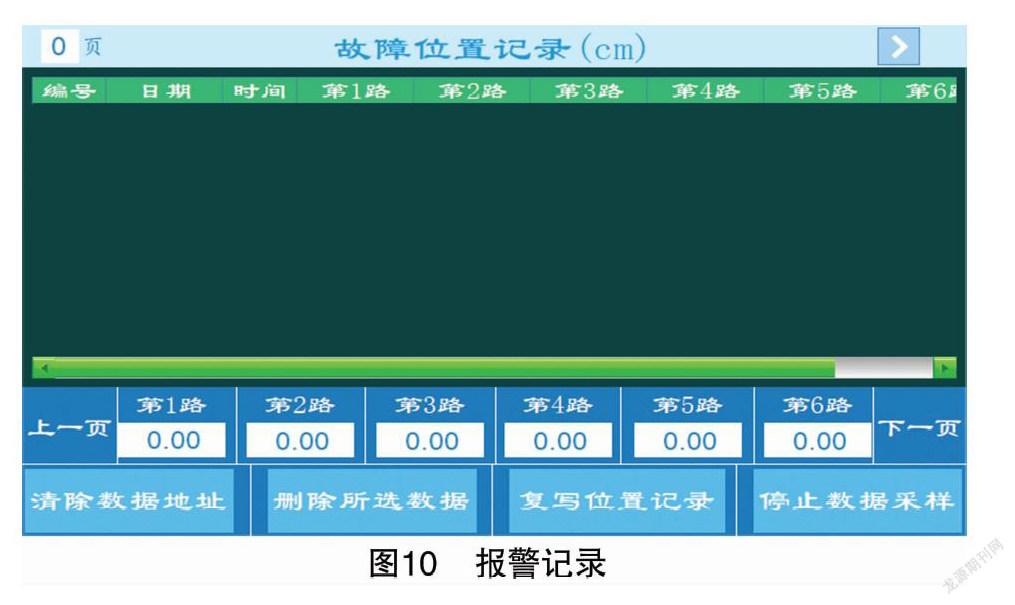
故障位置记录(图11):当故障发生时采集脉冲数据并记录报警时的累计脉冲数,当停止作业、检查机具时再次记录脉冲数据,计算故障时间段内机具的行走距离,为后续补肥作业留置定位信息。
4 田间试验
为检测分层施肥机控制系统的性能指标与稳定性,于2020年10月15日前往第八师121团32连进行田间试验测试。试验所用肥料为尿素和复合肥2种,图12为试验现场。
4.1 肥料缺失监测试验
为监测肥料漏施问题,分别向2组肥箱添加 5 kg 尿素和复合肥,作业起始阶段,输肥管处持续下肥状态,系统未发出报警信息,待肥箱排空,处于缺肥状态时,系统报警器响起,并在人机交互界面上呈现出报警状态。通过多次检测试验,结果表明缺肥报警准确率达100%。
4.2 肥料堵塞监测试验
在作业前选定某一路施肥靴,将其下端排肥孔用软棉布包裹住,形成堵塞。肥箱中加入10 kg肥料,启动施肥机进行试验,当发生报警时立即停止作业,并查看交互界面中显示堵塞的施肥行是否与预置堵塞的施肥行相互一致,更换堵塞其他施肥靴,重复上述试验过程,通过统计50组肥料堵塞对照试验结果,表明堵肥报警准确率同样达100%。
4.3 作业面积统计试验
人工测量机具作业的行走距离和作业幅宽,将人工测算面积与系统统计面积进行试验对比,具体结果如表1所示。试验均值误差为0.022%,最大误差小于0.05%,达到了设计的统计误差要求。
5 结论与讨论
本研究设计了一种分层施肥机作业监测系统,以三菱FX2N PLC作为控制器,威纶通触摸屏作为上位机,并利用LoRa无线扩频技术和modbus协议建立了上下位机的稳定可靠通信,实现了控制系统的一体化操作和作业参数的实时监测。
田间试验结果表明,肥料缺失与肥料堵塞报警成功率均达到100%;作业面积监测相对误差≤0.05%,满足田间作业需求。
分层施肥作业监测系统满足了现有条件下的作业监测功能要求,也可为其他农业作业监测提供通用性适配。针对未来智能农机的发展,还要在数据自动化分析、智能决策、农机物联网和云平台等方面进一步研究。
参考文献:
[1]唐 汉,王金武,徐常塑,等. 化肥减施增效关键技术研究进展分析[J]. 农业机械学报,2019,50(4):1-19.
[2]潘圣刚,莫钊文,罗锡文,等. 机械同步深施肥对水稻群体质量及产量的影响[J]. 华中农业大学学报,2013,32(2):1-5.
[3]李寒松,贾振超,张 锋,等. 国内外水肥一体化技术发展现状与趋势[J]. 农业装备与车辆工程,2018,56(6):13-16.
[4]张彩军,霍俊豪,袁 洁,等. 分层减量施肥对花生植株干物质积累及产量的影响[J]. 花生学报,2020,49(3):58-63.
[5]李国生,吴小宾,魏建林,等. 分层施肥对玉米产量及氮肥利用率的影响[J]. 山东农业科学,2020,52(3):66-71.
[6]李光辉,弋晓康,李建军,等. 棉花分层施肥机的研制与试验[J]. 新疆农机化,2019(4):12-14,17.
[7]邹忠君,孙艳华. 玉米一次性分层缓释施肥技术试验研究[J]. 农学学报,2011,1(6):6-9.
[8]赵立新,张增辉,王成义.等. 基于变距光电传感器的小麦精播施肥一体机监测系统设计[J]. 农业工程学报,2018,34(13):27-34.
[9]资双飞,罗锡文,苗峻齐,等. 基于电容测量的施肥机监测系统研究[C]//创新农业工程科技 推进现代农业发展——中国农业工程学会2011年学术年会论文集.重庆:中国农业工程学会,
2011:1224-1229.
[10]张继成,陈海涛,欧阳斌林,等. 基于光敏传感器的精密播种机监测装置[J]. 清华大学学报(自然科学版),2013,53(2):265-268,273.
[11]窦钰程,欧阳斌林,陈海涛. 光敏式气吸播种机监测装置研究[J]. 东北农业大学学报,2010,41(9):133-137.
[12]陈 满,施印炎,汪小旵,等. 基于光谱探测的小麦精准追肥机设计与试验[J]. 农业机械学报,2015,46(5):26-32.
[13]Tola E,Kataoka T,Burce M,et al. Granular fertiliser application rate control system with integrated output volume measurement[J].Biosystems Engineering,2008,101(4):411-416.
[14]左兴健,武广伟,付卫强,等. 风送式水稻侧深精准施肥装置的设计与试验[J]. 农业工程学报,2016,32(3):14-21.
[15]苑严伟,张小超,吴才聪,等. 玉米免耕播种施肥机精准作业监控系统[J]. 农业工程学报,2011,27(8):222-226.
[16]祝清震,武廣伟,罗长海,等. 基于姿态实时监测的多路精准排肥播种控制系统研究[J]. 农业机械学报,2018,49(增刊1):155-163.
[17]宋少龙,张东超,汤智辉,等. 基于离散元法的分层施肥靴参数优化与试验[J]. 中国农业大学学报,2020,25(10):125-136.
猜你喜欢
今日农业(2021年8期)2021-11-28
艺术启蒙(2018年7期)2018-08-23
海峡姐妹(2017年7期)2017-07-31
Coco薇(2017年5期)2017-06-05
科技创新导报(2016年21期)2016-12-17
科学与财富(2016年28期)2016-10-14
现代农业(2015年11期)2015-02-28
现代农业(2015年3期)2015-02-28
新疆农垦科技(2014年9期)2014-02-28
舒适广告(2008年9期)2008-09-22
