无轮式里程计下移动机器人路径规划的研究
2021-11-19 13:44:26管修涛孔斌李泽彬张进思鲍惠芳
电子测试 2021年20期
管修涛,孔斌,李泽彬,张进思,鲍惠芳
(1.皖西学院机器人创客实验室,安徽六安,237012;2.皖西学院 农林智能装备与物联网六安市创新中心,安徽六安,237012)
0 引言
随着机器人行业的发展,越来越多的领域使用到机器人,但是使用轮式里程计进行外部环境的感知存在很多问题,尤其是在非水平的地面上,由于颠簸和车轮打滑等显现会造成测量误差过大导致收集的数据无法使用,从而影响机器人的运动规划[1]。随着SLAM(同步定位与建图)的发展,现在的2D-SLAM技术比较成熟,常使用的2D-SLAM算法有6种,分别为Gmapping、Hector slam、Karto slam、Lago slam、Core slam、Cartographer[2-3]。其中 Gmapping 是使用最多的,该算法是在RBPF算法上进行了优化改进[4],但是不适合大场景地图的构建;而Karto slam算法在大场景下制作地图更合适;Hector slam算法虽然对传感器要求较高,该算法更加贴合移动机器人的实际运动情况,在小范围内制作出来的地图精度较高。因此,本研究将采用Hector slam算法利用收集到的激光束点阵来优化,估算出收集的激光点在栅格地图的位置,并通过激光雷达扫描配对机器人进行运动评估,建出精度较高的栅格地图[5]。确定好机器人的初始位置之后可以利用栅格地图配合Navigation导航系统可以让小车实现移动路径的规划并且到指定目标位置。
本文将验证运行移动机器人在无需轮式里程表的情况下构建地图和路径规划的可行性。
1 硬件与虚拟系统框架结构
1.1 硬件平台的组成
本文中移动机器人主要是由运动控制驱动器,下位机树莓派、信号收集的激光雷达三大部分组成,通过电脑远程访问连接控制移动机器人的运动。其中激光雷达作为传感器用于获取周围环境中的信息,并将收集到的信息发送到下位机树莓派上,树莓派将收集到的信息发送到电脑上,通过算法处理收集到的信息,发布指令给下位机,下位机将指令传递给运动器控制移动机器人的移动路径规划。
1.2 虚拟仿真平台的搭建
虚拟仿真平台采用的是Linux系统,使用Ubuntu18.04,并在上面安装ROS Melodic和Gazebo物理仿真平台。在Gazebo物理仿真平台搭建好模拟室内场景,将提前搭建好的小车模型导入到仿真平台,利用ROS系统中自带的RVIZ插件配合Hector slam将仿真平台环境扫描出来构建出概率栅格地图,配合使用Navigation导航进行运动路径的规划。
2 算法实现和数据的优化
实验中使用的Hector slam算法主要过程是收集概率栅格地图、利用高斯牛顿法匹配、使用多分辨率地图比对避免某一部分栅格地图概率陷入局部极小值。利用插值法来获得一个连续的概率栅格地图。当移动机器人运动时候与之前数据进行比较分析,运用高斯-牛顿法计算出合适的地图[6]。使用迭代法的方法找到当前时刻移动机器人运动最优解并且更新最新的栅格地图数据,优化栅格地图边界不清晰的问题。
在激光雷达使用过程中,传感器获取的数据不能直接拿来使用。直线、直角场景的数据需要通过概率霍夫变换,处理提取到的拟合更新直线,优化数据的连续性,获得更高精度的栅格地图,减少其他外来因素对实验结果的影响,提高地图与实际应用的匹配程度[6]。
3 仿真实验与实际实验结果与分析
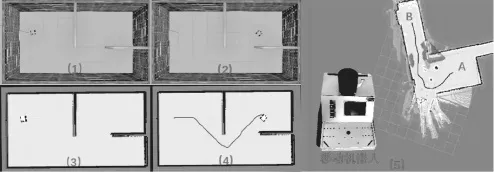
图1 其中图(1-2)分别为移动机器人在gazebo仿真中起点和终点位置;图(3-4)分别表示为移动机器人位于栅格地图中的始点与终点,其图(4)中红线为移动机器人路径;图(5)是移动机器人在实际环境构建栅格地图及从A点运动到B点的规划路线,左下角为移动机器人实物
由图(1-4)可知,在虚拟仿真系统中验证了Hector slam算法实际有效,并通过观察上图(3-4)可知使用Hector slam算法构建得到栅格地图轮廓清晰,Gazebo仿真平台内的边界在栅格地图中表现准确,配合Navigation导航系统能够实现移动机器人在仿真平台的路径规划运动到指定目标位置。图(5)可知,使用图中的移动机器人,通过运行结果发现,移动机器人能够识别出周围环境并且构建出轮廓清晰的栅格地图。使用此栅格地图,调整小车上发射的激光束与栅格地图重合,给予移动机器人指定目标位置B,移动机器人利用构建的地图从A点进行移动路径规划并且自动避障到达指定的目标位置B点,此时得到的结果与仿真结果一致,符合实验预期效果。
4 结语
基于本文虚拟仿真和实验结果表明,无需要轮式里程计下移动机器人可以实现路径的规划运动到指定的位置,实现移动机器人的自主导航。运用Hector slam算法得出的实验数据准确,能够以地图的形式直观的展现出来,满足移动路径规划的需求,具有一定的使用价值。随着技术的发展,运动路径规划会以多算法多传感器形式融合,满足实际环境中更加复杂路况。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
北京航空航天大学学报(2022年6期)2022-07-02 01:59:12
科技创新与应用(2021年31期)2021-11-09 13:11:18
汽车观察(2021年8期)2021-09-01 10:12:41
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
制造技术与机床(2017年3期)2017-06-23 08:11:21
弹箭与制导学报(2015年1期)2015-03-11 15:32:23
雷达学报(2014年4期)2014-04-23 07:43:13
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28 12:21:31