
垃圾分类机器人步进电机AI闭环控制方法
2021-11-19 08:17秦郡酉李卫国王利利
计算机仿真 2021年10期
秦郡酉,李卫国,王利利
(内蒙古工业大学机械工程学院,内蒙古 呼和浩特 010051)
1 引言
为了深入贯彻习近平总书记关于垃圾分类工作的重要指示精神,推动国家公共机构更好地开展生活垃圾分类工作,发挥带头示范作用,国家发改委印发了《关于公共机构生活垃圾分类工作评估参考标准》,并就进一步推进相关工作提出了要求。垃圾分类,一般是指按照一定的规则或标准,对垃圾进行分类贮存、分类投放、分类搬运,从而转化为公共资源的一系列活动的统称。分类法旨在提高垃圾的资源价值和经济价值,力求物尽其用。针对垃圾分类工作,设计和研制了垃圾分类机器人[1]。垃圾分类机器人的基本组成部分包括:执行设备、控制装置、驱动设备、检测装置等,其中步进电机是垃圾分类机器人的重要组成部分。
步进电机是一种开环控制元件,它能将电脉冲信号进行转换。当运转过程中没有过载状况产生时,垃圾分类机器人接收的脉冲信号以及脉冲数额单一决定机器人电机的转速以及运动轨迹停止位置。若步进电机的驱动装置接收到脉冲信号时,在驱动装置的作用下步进电机按照设定的参数和方向旋转,即所谓的“步距角”,步距角越大越好,步距角越小越好。步进电机是一种特殊电机,它不能直接接通直流或交流电源进行控制,必须采用专用的驱动电源[2]。步进电动机控制可分为开环控制和闭环控制,
目前,国内外对步进电机的闭环控制方法存在诸多不足之处,如不够灵活、低频振荡等,造成了比较严重的控制效果不佳,为此,针对垃圾分类机器人设备,采用人工智能(Artificial Intelligence,AI)技术,对步进电机进行闭环优化设计。
2 机器人步进电机AI闭环控制方法设计
其中,闭环控制以受控输出的形式返回到控制的输入端,主要起到对输入端的控制作用,与其形成控制关系。操作员启动垃圾分类机器人的控制模块后,将控制信息丢失给被控对象,并将其状态信息反馈给输入端,对操作过程进行修正,保证步进电机的输出达到预期的要求。相比于开环控制,闭环控制方式更加灵活、工作性能也更好。此次设计的垃圾机器人步进电机控制方法在传统方法的基础上,利用闭环控制原理,通过AI技术实现步进电机控制方法的优化设计。闭环控制方法的基本原理如图1所示。

图1 闭环控制原理
图1中,其控制命令信号由动态和静态信号叠加而成。指令信号发出后,进入控制闭环程序。计算电机的实际状态信息,并将FPGA反馈给STM32模糊PID(Packet Identifier,数字电视)控制器[3]。FPGA将脉冲信号输入到步进电机驱动电机,实现了单通道步进电机的闭环控制。
2.1 分析垃圾分类机器人工作程序
垃圾分类机器人的运行程序包括:图像提取、图像预处理、图像识别、信息反馈、机器操作、垃圾分类等几个步骤,主要是通过识别垃圾来实现分类。垃圾图像的采集首先通过相机记录图像,将所提取的体图像信息存储进存储器,再通过中央处理器进行进一步处理[4]。在接收到数字图像信息后,中央处理机对垃圾图像进行预处理和判断,并根据预处理结果将目标进行实时定位识别,对目标垃圾进行类型分析,将分析结果以指令的形式发送给垃圾机器人,用于垃圾分类作业。图2为垃圾分类机器人工作程序中图像的提取过程。
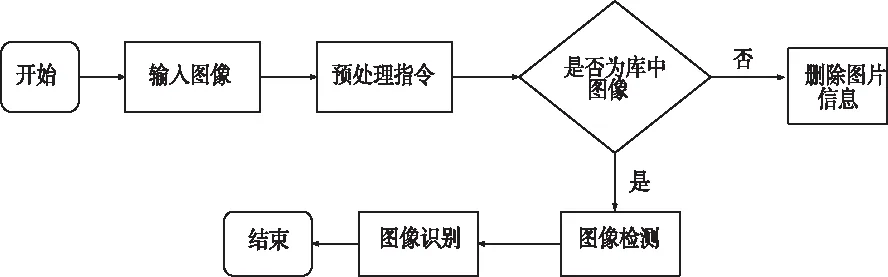
图2 图像提取流程图
分析目标物体特点信息是进行图像的识别的重要手段,它可以识别垃圾分类机器人视觉系统中垃圾分类目标的大致形状描述和尺寸大小,可以作为分类识别不同目标的依据[5]。实现瓶罐类垃圾的轮廓特征识别和正确分类。主要识别步骤为:首先确定目标垃圾的形状样态,构建目标垃圾的形状模型,根据所得模型识别出目标垃圾的定位坐标和物体角度信息。最后,根据上述目标信息完成对目标边缘轮廓的模拟构成,构建出目标垃圾的模型。其中,针对目标形状信息的计算方法为利用识别出的图像垂直和水平相差度来接近物体的梯度算子,将图像离散化处理。f(x,y)设为离散图像信息,即

(1)
2.2 构建步进电机数学模型
在忽略线圈自感的谐波分量和库伦摩擦影响的情况下,得出步进电机的单相等效电路如图3所示。

图3 步进电机的单相等效电路
图3中,E为反电动势。用电压方程、转矩方程和动力学方程来描述步进电机的动态数学模型[7]。由单相电机等值电路直接求得电压方程为
(2)
式中ia表示a相电流、ib表示b相电流、va表示a相电压、vb表示b相电压,R表示每相绕线电阻,Ea和Eb为电机A和B的反相电动势,Km表示电机的转矩常数[8]。L为每相的电感,θ和ω分别表示电机的机械角度和角速度,参数Nr为转子齿数。另外垃圾分类机器人步进电机的转矩方程可以表示为
Tem=-Km[iasin(Nrθ)-ibcos(Nrθ)]-Tdmsin(Nrθ)
(3)
其中Tem和Tdm分别为电机的电磁转矩和定位转矩。综合上述原理,可以得出步进电机的机械动力学方程为
(4)
式中J为电机的总转动惯量,B为摩擦阻尼系数,TL为负载转矩[9]。上述方程完整的描述了垃圾分类机器人步进电机的数学模型。
2.3 安装闭环控制器
图5表示步进电机闭环控制器原理。
从图4中可以看出,在闭环控制器的运行过程中通过参考值(r(t))与实际值(y(t))的比较可以得出运行偏差(e(t)),结合偏差的的求解结果,通过比例P放大调节和积分I控制两个步骤,实现对控制器运行偏差的控制,最后通过对整个PI的调节量u(t)的调节实现被控对象的有效控制[10]。在连续时间域中,垃圾分类机器人步进电机闭环控制器的基本运行公式为

图4 闭环控制器原理框图
(5)
式中Kp和Ti分别表示比例系数和积分时间常数。
2.4 AI检测步进电动机位置
当单相定子绕组的电流通过时,转子运动到磁链的最大位置,定子电感随转子绕组的运动由最小变为最大。利用对应关系和人工智能技术,测量定子电感,获取转子位置信息[11]。根据绕组的通电状态,可分为通电相绕组检测和通电相绕组检测,由于混合步进电动机中不存在不通电相,因此仅检测不通电的绕组。其中一个方法是在定子绕组外加一个高频电压脉冲,测量绕组内电流的变化,电感量可由式(6)计算出来
(6)
由已知的外加信号,抗干扰能力强。该方法需要增加产生高频脉冲的电路,使电路结构复杂,产生的电流也可能产生负转矩输出[12]。当电感法用于检测电机位置时,电流的变化情况可以通过检测其变化时间来计算,并与电感的计算结果进行比较,从而确定当前步进电机位置的检测结果。
2.5 实现步进电机闭环控制
在垃圾分类机器人步进电机位置检测结果的基础上,对步进电动机的电流矢量进行分解,并分别从速度、启动/停止、细分换向等多个方面实现步进电机的闭环控制。
2.5.1 速度控制
步进电机的速度转矩特性包括牵引转矩和牵引转矩两个部分,且存在如下关系式
(7)
式中TL表示负载转矩,在加速控制过程中,步进电机转矩的变化情况如图5所示。

图5 加速-转矩特性
在实际的步进电机控制过程中,要求电机能对控制器发出的位置和速度指令迅速做出响应,所以加减速过程时间尽可能短,使给定的速度能在最短的时间内加减速,同时避免电机失步和卡转。该速度控制在初始速度为0时,即垃圾分类机器人步进电机的起动控制,而在目标速度为0时,实现步进电机的停止控制。
2.5.2 细分换相控制
步进电机的电细分驱动是通过控制电机励磁线圈电流,将步进电机定子的合成磁场按细步进电机定子角旋转,从而实现转子转动。在两相相邻的线圈同时通过不同尺寸的电流时,各相产生的力矩之和为零的位置就成了新的平衡位置,实现了对线圈的细分。
3 仿真分析
以测试设计的垃圾分类机器人步进电机AI闭环控制方法的控制效果为目的,设计仿真,实验中使用的垃圾分类机器人的步进电机样本结构如图6所示。
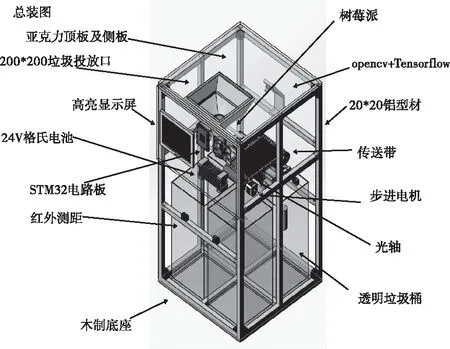
图6 垃圾分类机器人步进电机样本机械结构图
在此基础上分别对步进电机样本的基本参数进行设置,具体包括相绕组电阻为0.7Ω,额定电流为5.8A,旋转电压系数为1.24V*s/rad,转子惯量为480kg*cm2,步距角为1.2°,而转子齿数为50。由于选择的实验样本的工作原理是通过对垃圾图像的处理得出分类结果,因此为了保证机器人的正常运行,需要将机器人的基本运行程序导入到仿真环境中,视觉识别的基本后台运行界面如图7所示。
由于设计的控制方法应用了AI技术,因此需要将人工智能技术的相关参数和运行程序以代码的方式导入到仿真环境中。为了形成实验对比,除了设计的步进电机AI闭环控制方法外,还设置了传统的电机开环控制方法和文献[8]中提出的基于模糊PID控制的步进电机控制方法作为实验的两种对比方法,在实验的运行过程中三种控制方法以并行的方式运行,保证相互之间互不影响。
硬件外设主要由步进电机样本信息采集器和通信装置组成。由于相关的步进电机样本信息数据库内容复杂,规模庞大,且步进电机样本信息来源多样,因此需要通过信息采集器对数据库进行填充丰富与整理,采集器结构如图7所示。
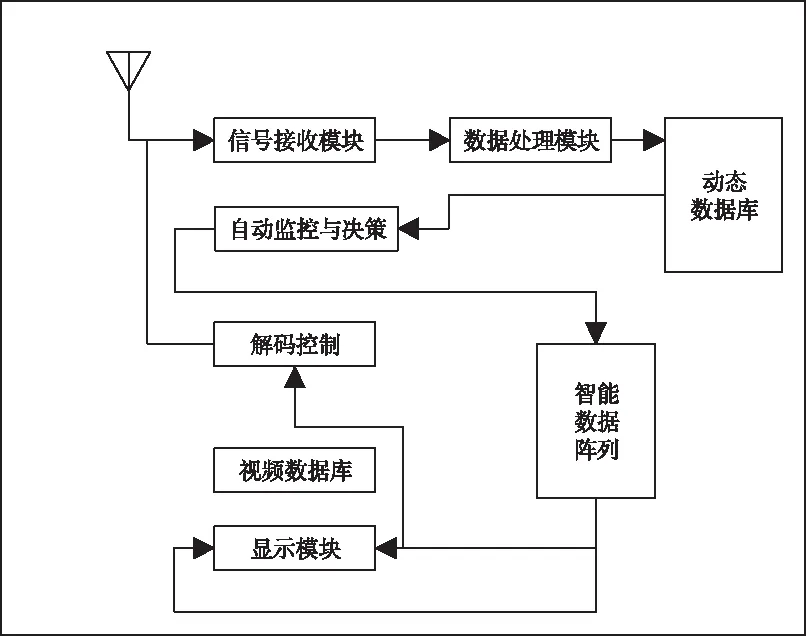
图7 采集器结构
本文多功能采集仪如图8所示。

图8 多功能采集仪结构
此外,为了保障数据信息采集与储存的正常运行,另配置大容量数据采集记录仪,可脱机离线独立采集存储,亦可实时采集传输,内部存储量高达512GB。
设置仿真的测试指标为控制精度,并分别从电机转速和方波位置响应两个方面,实现对控制精度的量化测试。设定转速目标值,并通过三种控制方法的运行得出转速控制误差的测试结果,如表1所示。
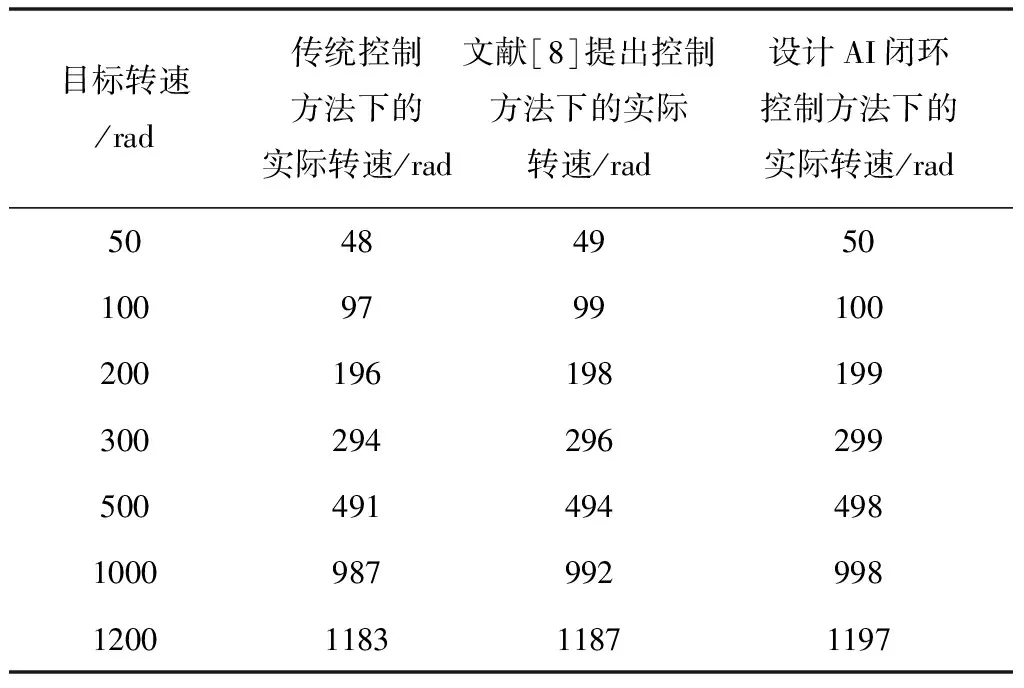
表1 步进电机转速控制精度测试结果
从表1中可以看出,三种控制方法对垃圾分类机器人步进电机转速的平均控制误差分别为7.71rad、5.00rad和1.29rad。同理可以得出三种不同控制方法下电机方波位置响应的测试结果,如图9所示。

图9 步进电机方波位置响应对比曲线
从图9中可以看出,在设计的垃圾分类机器人步进电机AI闭环控制方法下,电机样本的方波位置响应更加接近理想情况。综合转速和方波位置响应的测试结果,可以得出结论:相比于两个对比控制方法,设计的AI闭环控制方法控制效果更明显,应用价值更高。
4 结束语
1)通过对垃圾分类机器人位置的分析,以步进电机为执行单元,以 AI闭环控制器为核心,设计并建立了垃圾分类机器人的闭环控制方法。
2)垃圾分类机器人步进电机转速的平均控制误差为1.29rad,步进电机方波位置响应程度较高,与原始位置的拟合程度得到保证。
3)验证了步进电机闭环控制方案的合理性和可行性,实现了垃圾分类机器人运动轨迹的高精度控制,对城市规划和环保具有重要意义。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
北京航空航天大学学报(2022年5期)2022-06-06
防爆电机(2022年2期)2022-04-26
防爆电机(2022年1期)2022-02-16
电机与控制学报(2018年9期)2018-05-14
现代电子技术(2016年22期)2016-12-26
电脑知识与技术(2016年18期)2016-11-02
大学教育(2016年7期)2016-07-27
农机使用与维修(2014年1期)2014-09-23
