
煤炭系统地震勘测节点仪器的开发与设计
2021-11-18 03:39张晨林左卫华
科教创新与实践 2021年39期
张晨林 左卫华






摘要:地震勘探野外数据采集是一项工程量庞大的野外作业,根据现阶段煤矿地震勘探实际需要及存在的问题,把质量管理的思想应用到野外采集中,可以减少人为因素带来的误差,提高工作效率。结合目前勘探队和煤矿管理人员的需求,研制并开发了煤矿地震勘探质量管理信息系统,通过对节点仪器地震勘探设计的应用,从硬件设计和软件设计与开发角度分析了节点仪器在煤炭系统地震勘探技术中的应用。
关键词:煤炭系统;地震勘探;节点仪器;硬软件系统
引言
地震勘探作为煤炭系统勘探的重要手段长期以来一直受到人们的重视,而近年来开发地震的兴起使得地震技术在煤炭系统开发中同样起到了重要作用。地震勘探是一项硬件和软件高度集成的高端技术手段,硬件和软件技术的提高对其进步都有着重要的影响。
一、煤矿地震勘探质量监管难点
地震勘探是煤矿构造勘探中精度最高的方法之一,自20世纪90年代推广以来,在各矿区推广应用中取得了显著的地质效果。随着煤矿生产开采的进行,对构造控制精度的要求越来越高,提高勘探精度是煤矿生产设计首选之策。
对于地震勘探,前期野外数据采集尤为重要。考虑到施工过程中地表条件的复杂性,环境噪声人为因素等影响,如何对野外数据采集进行科学、全面地质量监控,是保证地震勘探精度和继续扩大地震勘探应用范围亟待解决的问题。煤矿地震勘探的质量控制,特别是野外数据采集施工质量,在现阶段主要还是通过施工方的自律,业主方和监理方的检查和监督来实现的,但从煤矿地震勘探的施工特点及现阶段市场状况看,有以下几点已成为质量监管的难点:
(1)野外数据采集每天由数万个检波点和数百个炮点,采集数据量大,质量控制范围广,难以做到全面管理;
(2)施工环节多,从招投标、设计、野外生产、数据处理、中间成果、提交报告等也为质量控制带来不便;
(3)采集质量的监控以及评价基本由手工来实现,烦琐的工作耗费了大量人力物力,而且在整個施工过程中不可避免地包含了很多人为因素,很难保证数据管理的科学性和完整性,工作也很难按照统一的标准进行;
(4)对于国内外采集质量管理软件,大多是在基于工作站的Un平台下操作,其价格昂贵,而且使用不同于Window系统界面,使用难度较大。
因此,结合煤矿地震勘探施工的特点,研制与开发适合煤矿的煤矿地震勘探质量管理信息系统具有重要的意义和广泛的应用前景。
二、节点地震勘探技术概述
随着地震数据采集方法和装备的改进、数据处理技术的提高和解释方法的发展,利用地震资料不仅能指示地下构造形态、断裂分布,而且能在一定程度上了解地层岩性、储层厚度、储层参数,甚至能直接确定油气藏的位置。地震资料同测井、岩芯以及其他地质资料相结合,能够极大提高煤炭系统勘探的准确率。高精度地震技术的进步包括地震数据的采集、处理和解释等几个方面。
2.1 地震数据采集
地震数据的采集是获得数据的第一步,因此尤为关键。当前地震采集采用干扰波定量分析、精确的浅表层结构调查、多种震源施工、灵活的观测系统设计等方法。随着勘探领域的扩展,地震采集的地貌状况也更为复杂。以中国石油天然气集团公司为例,近年来围绕复杂山地、黄土源等特殊地表和复杂陆相沉积地层进行地球物理勘探施工遇到的世界级难题,持续开展了提高信噪比、成像精度、层位预测准确率的一体化物探技术方法攻关,已经逐步形成了复杂山地、沙漠、黄土塌、海陆过渡带、大型城区、富油气区带、油藏地球物理、综合物化探等8项具有中国石油特色的技术系列。
2.2地震数据处理
在高精度地震勘探中,高精度的数据处理技术有着十分重要的作用,在某种意义上是决定成功与失败的关键因素。高精度数据处理技术,总的目标是追求高信噪比、高分辨率、高保真度,即我们常说的“三高”处理".
高精度的数据处理技术是建立在一定信噪比水平基础之上的,没有一定的信噪比也就无法讨论成像信号的分辨率和保真度,更不能对成像精度水平进行衡量。有关方法很多,应用效果十分显著回。最近几年,压制噪声从叠后数据转向了主要在叠前数据上进行,这不仅是认识观念的转变,也是提高数据处理精度的要求。叠前压噪的目的也不再是单一为了改善叠加处理效果,而是多方位的。例如,改善叠前偏移成像的效果,提高叠前解释性处理技术的准确度以及提高叠前数据属性提取的保真度等。
2.3地震资料解释
地震资料在解释的工作流程、剖面对比方法以及资料的应用及综合分析方面与二维地震资料解释有许多相同之处。但是,由于地震勘探在数据采集与处理过程中采用了与二维地震勘探不同的方法,因此地震资料解释又与二维地震资料解释存在着明显的不同。此外,随着地震数据采集、处理技术的不断发展和解释工作站功能的不断增强、大型集成软件的广泛应用以及面切片、相干体、可视化等解释技术的发展,使地震资料解释效率与精度显著提高。
三、节点仪器的硬件与软件部分开发
3.1硬件部分
地震波通过检波器转变成模拟信号,然后进入A/D转换单元,采样后变为数字信号,中央控制单元从A/D转换单元取回采样后的数字信号并存储到SD卡中。电台单元和天线用于与手簿之间的通信。中控通过电源管理单元对锂电池的状态进行监控,温补晶振为系统提供时钟信号,同时结合GPS授时完成节点系统的时间同步。
3.1.1中央控制模块
(1)中控MCU
中央控制模块主要负责整个系统有序、高效运行,控制对时、采集、存储等功能。控制模块选取主要考虑:(1)处理器的性能,处理器的内部架构和时钟运行频率等指标决定着处理器处理任务的速度。(2)处理器的外设资源,处理器丰富的外设资源将最大限度的和应用需求匹配,并且增加系统稳定性。(3)处理器支持的开发工具,完善的开发环境可以使得调试更加方便,有效减少开发时间。
根据所需设计的节点仪器系统功能复杂程度以及结合芯片提供的外设资源和相应功耗,本项目选择STM32微控制器STM32L471VET6作为中央控制模块的核心控制器,应用Keil作为开发工具。
(2)时钟
本项目采用温补晶振给主芯片提供时钟,确保在野外长时间采样时,各节点的采样时间同GPS时间对齐。由于晶体振荡器的震荡频率会随着温度的变化而变化,温补晶振即温度补偿晶体振荡器(TCXO),是通过其附加的温度补偿电路使由周围温度变化产生的振荡频率变化量削减的一种石英晶体振荡器。
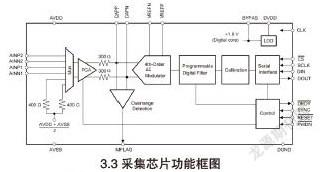
3.1.2信号采集模块
本次采用德州仪器生产的Δ-Σ型A/D转换器ADS1284。ADS1284是一款32位高分辨率的模数转换器,芯片内部包括一个低噪声可编程增益放大器(Programable Gain Amplifier,PGA),Δ-Σ调制器和数字滤波器。双通道多路复用器(MUX)具有用于信号测量和A/D转换器信号测试的输入。具有使输入电路短路和测试内部噪声的模式.PGA具有高输入阻抗和低噪声,可与地震检波器直接连接,实现QC检测。
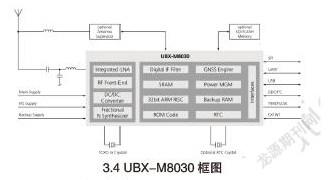
3.1.3时间同步模块
本项目采用u-blox公司的M8030芯片作为GPS接收机进行时钟精准管理,是一种多用途的卫星导航系统(Global Navigation Satellite System,GNSS)定位芯片,双频射频前端可以同步接收 GPS (QZSS) 和 GLONASS 或北斗,或同步接收 GLONASS和北斗卫星信号。它基于高性能的ublox m8位置引擎,使得这些接收器在不需要外部主机的情况下仍然可以提供行业领先的导航灵敏度和快速的捕获时间。u-blox先进的射频设计和干扰抑制,确保了芯片即使在恶劣的 GNSS 卫星信号环境下(如在城市峡谷中)也能提供可靠的定位。
3.1.4短距离通信模块
SX1262是Semtech公司最新推出的一款遠距离、低功耗的sub-GHz无线收发器。
SX1262内部具有TCXO晶振,可保证频率准确,支持的工作频段覆盖150–960MHz,具有两种调试方式,LoRa以及传统的(G)FSK,是一款高性能物联网无线收发器,其特殊的LoRa调制方式使通信距离在一定程度上可远达5km。SX1262内部集成了低噪声放大器(LNA),LoRa调制下,最高接收灵敏度可达-148dBm,同时还集成了功率放大器(PA),其发射功率最大可达+22dBm。SX1262还具备两种电压调节方式,低压差稳压器(LDO)以及高效率降压DC-DC转换器,采用高效率降压DC-DC配电方式,其接收电流最低可小于4.2mA,真正意义上实现了低功耗。最后SX1262集成的数字接口通过SPI和外界进行数据交互。
3.1.5存储模块
本项目选用16G的SD卡完成地震采集数据的本地存储。在存储容量16GB、节点系统采样率为1000SPS、采集精度为32bit的情况下,每个采样点的数据大小为4字节,一天24小时连续采集的数据大小就是329.5898MB,采集计算得到存储模块理论上能够存储的采集数据为49.71天,充分满足节点系统长时间野外采集工作的存储要求。
基于STM32L471VE的GL823的读卡功能,通过使用外部总线复用器TS3A27518EPWR信号分离器进行信号切换,当USB插入时选择GL823与SD卡连接,进行读卡操作,未插入时,STM32的SDIO接口与SD卡连接,主要用于读卡器主要用于STM32读写卡和电脑USB读卡。
3.1.6供电模块
本项目采用内置的18650锂电池组为采集站供电,该型号电池重量轻,容量大,而且自放电率很低,使用寿命长,无记忆效应,初步设计为两串六并。18650型号表示电芯直径为18mm,高度为65mm,每个单体电芯的电压为3.7V,容量为2.25Ah,组合后每组电芯的电压为7.4V,容量为13.5Ah。
3.1.7节点自检和QC模块
在仪器上线前和采集过程中要检测检波器自身、GPS、AD等模块是否正常。此模块由中央控制模块、信号采集模块、时间同步模块、短距离通信模块、数据存储模块和控制接收模块来共同实现。
3.1.8充电下载一体柜
充电:上线之前要保证每个节点处于满电状态,要求采集站电压≥8.4V。从亏电到满电大约需要2.5到3个小时的充电时间,机柜上红灯表示充电状态,绿灯则表示充满电状态。
节点单元存储的数据通过下载柜快速下载到客户端,然后通过光纤交换机转存到磁盘阵列上;服务器与多组机柜通过网络的方式连接在一起,并支持多组机柜并行处理。
随后根据 SPS 对下载后数据做匹配,检查野外节点回收的状况,是否存在漏收或者多收的情况。
3.2软件部分
本项目选择Keil作为STM32微控制器的开发工具。
无线地震数据采集的节点系统按功能划分了较多的模块,系统上电后不仅要完成地震数据的采集和后续处理,还要在采集过程中保持时间同步,同时需要响应上位机通过电台传输的控制信号回传自检状态和QC数据。因此,我们采用移植嵌入式实时操作系统,并基于此进行后续的功能模块软件开发。
我们采用分模块的设计思想,将各个功能部分划分成为单独的模块后独立地完成任务,然后通过中央控制模块对其他模块任务的调用,实现节点系统完整的工作流程。
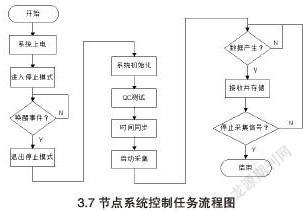
3.2.1整体流程
具体的工作流程为:
(1)当地震数据采集节点系统开始上电后,中控模块关闭除了电台模块以外的其他模块,并进入停止模式,将上位机连接节点系统的电台后产生的中断作为唤醒事件。
(2)当上位机连接后,节点系统退出停止模式,进入初始化,读取配置文件,完成系统自身参数设置,初始化SD卡并挂载文件系统。
(3)系统接着进行自检。
(4)QC测试结果合格后开启GPS接收机进行时间同步。
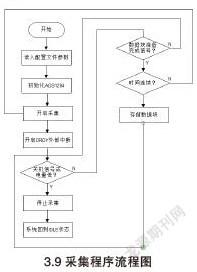
(5)时间同步的精度达到预先设定的要求后启动采集模块,A/D转换器完成每次采样后,从数据缓存寄存器中取回地震数据并存储到SD卡内,系统持续运行。
(6)当系统接收到停止采集信号时,采集任务结束,只保留电台模块供电,并重新进入停止模式。
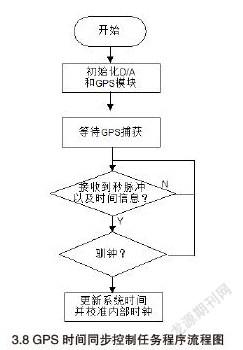
3.2.2时间同步方案设计
节点系统的时间同步过程即为通过授时设备产生标准时间t0完成对于节点系统本地实时时钟RTC的校正过程。
通过系统时间与GPS时间对齐,采样时间与系统时间对齐来实现时间同步。
3.2.3主要模块驱动程序
(1)采集单元
(2)授时单元
当控制程序完成QC检测后进入GPS同步状态,在该状态下节点系统进行时间同步。
(3)电台模块
作为中控MCU和上位机相互之间通信的桥梁,电台模块通过串口完成数据透传。串口数据透传是一种双向的数据传输通道,中控MCU可以把设备的状态参数通过串口发给电台模块,电台模块再将这些数据按照数据传输协议发给上位机,也可以将指令通过上位机发送给电台模块,电台模块再将指令通过串口转发给中控MCU。
结论
目前来看,软件工程的发展已经影响到了我们生产和生活的方方面面,对煤炭系统勘探领域的影响也是不容小视。煤炭系统地震勘探与开发正进入一个快速发展的时期,其中硬件和软件技术的进步为其注入了发展的活力和持续的推动力,已经取得了良好的经济和社会效益,为我国的能源安全和能源发展做出了巨大贡献。
参考文献:
[1] 匡伟, 李德春, 赵娟娟,等. 煤礦三维地震勘探质量管理信息系统研制与开发[J]. 物探与化探, 2009, 33(006):723-725.
[2] 孔阳. 一种适用于地震勘探仪器的低运算量数字滤波器的设计与研究[D]. 中国科学技术大学.
[3] 佟训乾. 无缆自定位地震勘探仪器网络结构及路由算法研究[D]. 吉林大学, 2016.
[4] 易碧金. GPS时钟同步法地震勘探仪器的设计与实现[J]. 石油管材与仪器, 2005, 19(001):5-8.
[5] 鲍五堂, 吴铁军, 石磊军,等. 现代网络传输技术与地震勘探仪器的发展[J]. 地球物理学进展, 2013(05):581-586.
[6] 周刚. GPS时钟同步地震勘探仪器的设计与应用[J]. 中国新通信, 2019.
[7] 熊家汇, 王成柱, 张泽斌. 煤炭资源信息管理系统(CSIMS)的设计与实现[J]. 计算机应用, 1985(04):34-40.
[8] 张诚, 王金海, 陈才和,等. 一种用于地震检波的传感器网络节点的设计[J]. 电子技术应用, 2007, 33(003):111-114.
[9] 熊峰, 王瑞贞, 李辛,等. 地震勘探节点仪器单元与大地的耦合装置:.
[10] 张玉新. 我国煤炭开发系统SD模型的构造与模拟[D]. 中国矿业大学(北京), 中国矿业大学, 1993.
[11] 郝建明, 赵伟. 软件和硬件新技术在油气地震勘探与开发中的应用[C]// International Conference on Broadcast Technology & Multimedia Communication. 2010.
猜你喜欢
时代英语·高二(2021年4期)2021-07-29
时代英语·高二(2021年4期)2021-07-29
卫星电视与宽带多媒体(2020年7期)2020-06-19
计算机辅助工程(2019年3期)2019-10-21
文萃报·周五版(2019年44期)2019-09-10
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
军事文摘·科学少年(2018年6期)2018-09-06
中学生数理化·高一版(2016年6期)2016-05-14
科技致富向导(2013年15期)2013-09-09
职业·下旬(2009年7期)2009-01-20
