智慧城市须跳出技术设计的狭隘框架
——以自动驾驶交通技术为例
2021-11-16 05:53李丽梅编译
上海质量 2021年10期
(李丽梅 编译)
编者按
随着技术的发展,智慧城市将成为可能。然而,技术并不等于智慧城市。以自动驾驶汽车为例,汽车自动驾驶可以显著提高机动车的安全性、行车速度,甚至促使城市设计转型,然而交通发展史表明,如果不“以人为本”地使用新技术,技术带来的新问题将大量出现。为了不重复历史的错误,城市设计者必须重视城市需求的多样性和交通的复杂性,跳出技术设计的狭隘框架来提供出色的解决方案。本文摘译自英文版《足够智慧的城市》(The Smart Enough City),作者本·格林(Ben Green)是密歇根大学杰拉尔德·福特公共政策学院助理教授、哈佛大学约翰·保尔森工程与应用科学学院应用数学博士。
汽车自动化技术正在飞速发展,人们对此普遍持乐观态度,认为自动驾驶汽车对改善城市交通有着近乎无限的前景。
首先,汽车自动化可以显著提高机动车的安全性。2015年,美国发生的交通事故使将近250万人受伤,超过3.5万人死亡。其中,94%的交通事故由人为失误造成——将近三分之一的交通死亡事故与酒后驾车有关,另有10%的死亡事故则由分心驾驶导致。自动驾驶汽车承诺可以消除可怕的危险驾驶——不会醉酒、分心或疲劳。一项分析发现,如果美国90%的汽车改为自动驾驶,那么每年将减少420万起交通事故,并减少2.17万起交通死亡事故,相当于每天挽救60条生命。
其次,自动驾驶汽车还可以迅速提高行车速度。与人类驾驶员相比,自动驾驶汽车具有更高的感知度、连接性和反应性,无须加大行车间距即可实现高速行驶。伊诺交通中心估计,如果自动驾驶汽车的普及率达到90%,那么道路通行能力将增加1倍,拥堵率可下降60%。
自动驾驶汽车感知度的提高及其与城市基础设施通信能力的增强甚至可能使城市从此摆脱交通不可磨灭的符号——红绿灯。麻省理工学院的研究者认为,用智能交叉路口取代传统交叉路口,如同过去把城市交通的“自然瓶颈”变成“乐团指挥”,城市街道的通行能力将翻倍,交通延误也将显著减少。
自动驾驶汽车还可以促使城市设计转型。城市设计师金德•鲍姆加德纳预测:“随着通行速度的提高,所需车道将减少,许多高速公路车道将被淘汰。”更激动人心的是,自动驾驶汽车将大大减少城市停车需求。随着汽车实现自动驾驶,或许不再需要将汽车整天停放在市中心的马路边或停车场。相反,自动驾驶汽车可以在办公室门口放下乘客,然后离开,去接另一位乘客,或者将自己停在不挡路的地方。奥迪城市未来计划的负责人表示:“停车场将被转移到室内或市中心之外,释放户外场地用于发展公共空间。”
自动驾驶汽车另一个好处是减轻人们的驾驶负担,为目前缺乏交通工具或驾驶能力的广大群体提供富有希望的机动性,驾照不再是老年人、残疾人和儿童的出行障碍。例如,2017年的一份报告认为,自动驾驶汽车可以帮助200万残疾人获得通勤服务和430万人获得医疗服务。此外,由于人们不再负责驾驶,因此在车上的时间可用于其他活动。早上,通勤可以成为回复电子邮件、阅读新闻或看电视的时机。
鉴于所有这些预期的好处,人们对自动驾驶汽车改善城市持极度乐观态度。2013年,摩根士丹利曾报道称,到2030年自动驾驶汽车可能无处不在,未来世界将成为一个“乌托邦社会”。
这听起来非常神奇,但以前我们也曾听过类似承诺。20世纪30年代设想的“汽车时代”是一个“没有事故、没有拥堵、没有延误的汽车时代”。1939年在纽约举行的世界博览会的重头戏莫过于通用汽车赞助的名为“未来世界”的“仙境”,预言了“更高效”的“现代交通系统”可以“消除交通拥堵”,创造“更美好的生活”。
对于城市交通问题,我们一直在等待新技术提供解决方案。然而,20世纪的城市按照“未来世界”的想象重新建设,反而导致了道路拥堵、公共交通设施薄弱。所以,城市最重要的任务并不是预测技术的未来并满怀希望,而是深谋远虑地运用技术去塑造未来。
为了避免重蹈覆辙、陷入未来世界的陷阱,我们必须向历史学习。人们渴望并追求汽车时代的过程表明,过于相信技术解决社会问题是危险的,我们今天为自动驾驶汽车时代来临做好准备的决策至关重要。
20世纪初,人们普遍认为街道是公共空间,有轨电车可以行驶,行人可以步行,孩子可以玩耍。20世纪20年代,当汽车被大量引入美国城市街道时,它们带来了混乱和冲突。可怕的事故震惊了公众。父母担心孩子的安全,市中心的商人担心交通拥堵减少利润,警察早期在街上维持秩序的尝试徒劳无功。汽车似乎无法与行人、儿童和有轨电车和平共处。
历史学家彼得•诺顿在《与交通作斗争:美国城市汽车时代的黎明》一书中写道,汽车是城市街道既有平衡的“入侵者”。诺顿解释,作为一种“与旧街道用途不兼容”的新技术,汽车“违反了街道用途的主流观念”,由此造成的不稳定导致了一段时期的“灵活解释”,有关汽车和街道的社会认知不断涌现。司机、家庭、警察、商人和汽车制造商竞相界定如何使用汽车,以及谁对街道拥有合法的权利。
出于中立协调各方的需要,城市向交通工程师寻求解决方案。虽然管理城市街道具有争议性,但交通工程师被视为解决问题的“公正专家”,因为他们“以科学方式进行(推论)”。人们普遍相信,工程师能够设计出一种社会最优的客观解决方案。
过去几十年,工程师展示了如何应用技术专长帮助城市有效管理过度负荷的水电公共事业,没有理由认为交通有什么不一样。对于工程师而言,诺顿写道:“城市街道就像自来水供应、下水道或天然气管道,作为一种公共服务,需要专家从公共利益出发进行监管。”工程师从管理其他公用事业的经验中总结出新方法(例如交通调查),把交通流比作自来水流或污水流,他们相信“交通的科学组织……可以立刻减少一半的交通拥堵”。
这是有关技术障目镜的第一个案例。如同其他公用事业建设一样,交通工程师坚信提高效率可造福所有人,诺顿写道:“他们认为自己的任务是优化交通容量。”因此,工程师开始根据模型方程来调整交通信号配时,力图最大限度地提高每条街道的汽车流量。
但是改善交通流量是有代价的,因为优化城市生活的某一个方面,往往需要限制其他方面的效率。司机可能受益于最新的信号配时,汽车得以更快行驶,但是行人却发现这些变化使街道变得非常不友好。用1926年《芝加哥论坛报》一篇报道的话来说,穿越城市街道变成了“一连串的心脏狂跳、闪避和跳跃”。
通过关注行车速度并忽略行人的需求与行为——行人被完全排除在模型方程之外,交通工程师提高了交通流量,诺顿解释说“这有利于将街道重新定义为机动车道,而行人则不属于这个地方”,然后街道“被社会重建为毫无疑问属于汽车驾驶员的地方”。通过这一“闭合”过程,对街道的灵活解释达成了社会共识,即街道是为汽车设计的,而妨碍行驶的行人是令人头疼的“乱穿马路者”。
社会观念的这种转变为汽车工业自利的论点铺平了道路,即应该重新设计城市,优先考虑和促进汽车通行。交通拥堵不是因为汽车自身的空间利用率低下,而是因为街道空间不足。同样,汽车的危险被认为是行人的过错和街道老旧所致。
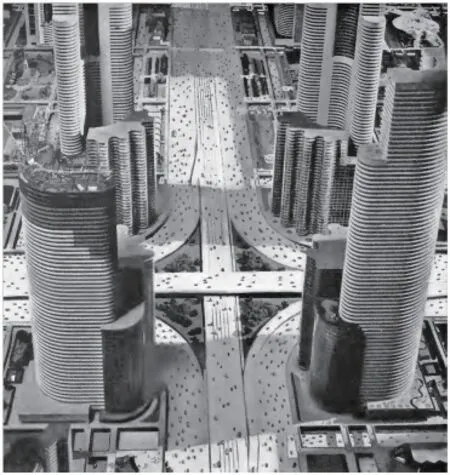
图1 美国工业设计师诺曼•贝尔•格迪斯为1939年纽约世界博览会设计的“未来世界”
通过广告宣传和类似“未来世界”的比例模型,汽车制造商、石油公司以及其他利益相关者,取得了大众对乌托邦汽车时代的支持,“城市应该为汽车而重建”变成了“共识”。这些利益集团运用他们新获得的力量换来大规模的政府投资。其中最引人瞩目的,当属州际高速公路系统。该项目于1956年获得批准,代表了当时世界规模最大的国内公共工程项目。直到最近几十年,城市设计的焦点重新回归“以人为本”,从为汽车而设计转向为人而设计,许多以汽车为中心的设计才逐渐被扭转。
专注于高效汽车行驶具有两个严重缺陷,当我们开始着手规划自动驾驶汽车时,这两个缺陷同时浮出水面。如前所述,交通模型的第一个问题,在于选择测量什么和忽略什么。工程师竭尽全力评估汽车流量,却甚少关注行人和骑车者的流量与安全以及公共交通问题。“当交通工程师说他们已经优化了交通信号灯时,通常意味着他们是为机动车驾驶者做出优化。”交通工程师指出,“(交通工程师使用的)标准软件Synchro[1译者注:Synchro是美国一款交通信号协调及配时设计软件,主要用于交叉路口信号配时优化。]基于最小化汽车延迟,甚至不计算行人延迟。”
由于大多数交通工程师致力于追求仅从汽车出行来定义的效率,因此他们不去评估道路是否满足行人和公共交通的需求。模型方程所遗漏的东西不仅被忽略,甚至还被贬损。拆除行人设施可以缓解交通拥堵问题,而行人、骑车者和其他人的损失并不会体现在模型中。因此,这种操作被视作“增进社会福祉”。最终,工程师在设计城市拥堵解决方案时,根本不会去考虑对人、对社区的全面影响。
尽管一个明确“将街道让位于汽车”的规划会遭到强烈抵制,但是在“采用数学模型提高效率”的包装下,掩盖了“街道让位于汽车”的根本转变。很少有人意识到,提高交通效率可能会使某些群体受益,但以其他群体受损为代价。
交通模型的第二个主要缺陷可以用另一个历史教训加以说明。1936年,纽约市大张旗鼓地建设大中央车站、跨区高速公路和劳雷尔顿公园大道。在纽约经历多年交通拥堵之后,纽约的总建造师罗伯特•摩西提出这些雄心勃勃的新项目,誓言为“后世几代人”解决纽约交通拥堵问题。但是,罗伯特•卡洛在所著的摩西史诗传记《成为官僚》中揭露了真相:交通缓解仅仅持续了三周,而不是几代。但摩西丝毫不为所动,继续大拆大建。三区大桥于1936年建成通车;1938年,旺托州立公园路延长线完工;1939年,布朗克斯白石大桥建成并投入使用。每个项目都承诺可以缓解交通,但是没过多久,交通拥堵依旧严重。
规划师开始注意到一个令人费解的模式:每次新公路干道建成之后,很快又陷入交通堵塞,而旧干道的负担也没有得到明显缓解。三区大桥开通之后,报道说“布朗克斯的有车一族……不约而同决定取道新桥和中央公园大道前往海边,然后几乎所有人都陷入交通拥堵——无数其他驾车者也陷于其中”。卡洛写道:“这座桥是世界上最庞大和最现代的交通分流和运输机器,但它的建造……却未能解决本应解决的交通问题。”
摩西的纽约可能代表了一个极端的例子。人们渴望旅行,新路一建好几乎立刻就被填满,但这其实是一种常见现象,被称为“诱导需求”。1962年,经济学家安东尼•唐斯首次定义了诱导需求。他证实,“在城市通勤高速公路上,高峰时段的交通拥堵程度会上升到道路最大容量”。“如果道路是区域内更大交通网络的一部分,其高峰时段的交通拥堵无法通过扩充公路容量得到永久性缓解。”唐斯解释说,最直接的原因,是以前曾走其他路线的人开始使用扩建之后更快的公路(空间趋同)。同时,以前为了避免交通拥堵而错峰出行的人会利用新增道路的通行能力,在高峰时段出行(时间趋同)。还有一些人不再乘坐公共交通,开始自驾(模式趋同)。诱导需求的其他原因还包括:人们曾在交通过于拥堵情况下放弃的出行,现在变得可行了。道路通行能力的提高,造成出行需求增加。
20世纪的交通工程师基于他们在公用事业的工作经验,错误地认为城市的交通需求是相对固定的,因此增加道路通行能力就可以让每个人更快到达目的地。但事实是,许多人避免出行的主要原因,正是因为交通拥堵。提高道路通行能力,会吸引因交通堵塞而放弃出行的人出行。工程师们忽视了新建或扩建道路将改变人们的行为习惯,没有将这种二阶效应纳入他们的数学模型,因此大大高估了增加道路容量所带来的好处,交通拥堵问题远未得到解决。
当技术狂热分子把自动驾驶汽车视为通往乌托邦之路时,他们是在重复历史的错误,忽视了城市需求的多样性和交通的复杂性,仅围绕技术来设计狭隘的解决方案。事实上,以无处不在的自动驾驶汽车为特色的乌托邦社会既不合逻辑,也不值得追求。
基于自动驾驶的任何现实预测,都必须从诱导需求开始。在城市街道上引入自动驾驶汽车,通过提高行驶速度和道路车辆密度,在很大程度上等同于扩大这些街道的实际通行能力。而且,随着道路容量的增加,出行需求也相应增加,人们会通过多驾车来利用这些好处。这种诱导驾驶将增加交通拥堵,尤其是在通勤高峰时段,从而大大抵消了快速出行可能带来的好处。
诱导需求现象还表明,自动驾驶将带来相比美国以往更大规模的城市发展。事实与直觉恰恰相反,尽管过去一百年平均出行速度显著提高,但平均出行时间却保持相对稳定,因为出行距离增加了。研究表明,人们并未利用出行速度的提高而缩短通勤时间,只是因此搬离市中心去往更远的地方。据此,我们可以预测,自动驾驶虽然在某种程度上提高了出行速度,将导致社区不断扩张,而不是通勤时间缩短。
此外,如果以前花在驾驶上的时间可以用于工作或休闲,人们可能会愿意接受更长的出行时间,从而进一步增加出行距离。这种由自动驾驶汽车引发的扩张,可能导致市中心的投资减少,同时对环境造成毁灭性后果——人们住得越远,出行驾驶行为也越多,车辆排放的温室气体也越多。
类似的逻辑也可以解释,将停车基础设施改建为步行街、自行车道和公寓大楼所面临的挑战。在载完乘客之后,自动驾驶汽车可以去接其他乘客,或者把车停在周边地区,从而释放市中心宝贵的房地产,以便用于其他用途。但是空无一人的自动驾驶汽车并不意味着它们没有行驶在路上。如果在市中心外修建停车场,那么自动驾驶汽车需要往返于这些设施之间;如果零乘客的自动驾驶汽车频繁进出市中心,那么道路上的车辆数量可能会大幅增加。城市里将不再是四处兜圈找停车位的车主,而是挤满频繁进出市区的空空如也的自动驾驶汽车。或许,如果交通拥堵太严重,许多人可能还是觉得把汽车停在市中心的传统停车设施中更便宜或更方便,但这种选择将严重阻碍为改善现有停车基础设施而做的努力。
最重要的是,自动驾驶汽车的梦想重复了同样的错误——把交通效率置于可步行性和社区活力之上。思考如下说法——提高行车速度和取消红灯将大大减少出行时间。如果你坐在车里,这当然再好不过,但是这将为其他人创建一种什么样的城市呢?麻省理工学院所做的没有交通信号灯的城市模拟显示,与传统街道上行驶的车辆相比,汽车高效无缝地驶过交叉路口,但模拟中缺少一个重要元素——人。模拟中一个行人、一个骑车者或是一个公共汽车乘客都没有。然而,模拟所示的交叉路口却是全美最适合步行的地点,并且与波士顿最繁忙的行人和交通要道相交。如果连这个位置都变成了高速交汇口,那就很难理解车上每个人都急于去哪里。
如果我们希望建设一个行人能够穿越马路的城市(也许你会同意这是一个合理的期望),那么就必须放弃自动驾驶汽车不做丝毫停留地驶过市中心交叉路口的愿景。即使偶尔的红灯设置允许行人穿越马路,城市街道上高速行驶的汽车也会严重降低安全性、可步行性和城市活力。城市主要街道将变成高速走廊,想象一下在高速公路边吃午餐或者购物是多么不愉快的体验。尽管无阻碍出行的前景令众多技术人员振奋,但这并不是美好城市生活的主要特征。一个为了建设高速街道而摒弃交通信号灯的城市毫无人性和个性可言。
把交通视为一个需要技术解决方案的优化问题时,自动驾驶汽车的智慧城市建议往往被列为提升城市交通效率的最优目标。尽管让汽车更高效行驶有一定的价值,但并不是城市唯一的优先事项。更重要的是,效率涉及政治考量。哪些方面应该提高效率?谁来决定?应该通过什么方式提高效率?这些问题的答案会产生深远的社会与政治影响。社会选择衡量和优化的东西,体现了我们的优先考量选项。如果我们重视畅通的汽车交通甚于宜居的街道和公共交通,改善交通的努力实际上就只会针对缓解交通拥堵,使自动驾驶汽车(及其乘客)受益,从而牺牲行人、公共交通和公共空间的利益,让历史再一次重演。
尽管上述局限和警告并不能完全否定自动驾驶汽车的好处,但它们揭示了技术有益的梦想可能走向歧途,并强调未来几年城市必须做出正确决策的重要性。自动驾驶汽车几乎肯定会提高安全性和机动性,在某些情况下甚至可能使停车设施被重新设计。这些都是值得期待的前景。但是自动驾驶汽车不会创造乌托邦,我们充分认识自动驾驶汽车的局限性以及成功实施的障碍。
不难想象,在技术障目镜影响之下,城市将不断优化自动驾驶汽车,却冷落行人、公共交通和充满活力的公共空间。首先,技术障目镜使许多人仅仅依据交通效率的提高来评价城市交通的改善,即让每辆汽车以最快的速度从出发地到达目的地。这个信念促使技术专家和城市优先采用自动驾驶汽车去解决所有的交通问题。由于城市设计着重于为自动驾驶汽车提供便利,因而替代性交通方式被忽略,人们除了依赖自动驾驶汽车提高机动性之外别无选择,进而对其他优先事项和潜在解决办法视而不见。
城市规划师杰夫•斯佩克著有《适宜步行的城市》一书,对企图优化交通流量所带来的危险感到不满。他在书中解释道:“在某个环节上,我们的社会认定社区设计中唯一不可侵犯的原则是我们必须对抗交通拥堵,问题难道不应该是‘它会增加活力吗,它会促进平等吗,它会增进城市的成功吗?”
加拿大多伦多市对自动驾驶汽车采取了一种具有探索性又有原则的方法,展示了一个足够智慧的城市在迎接革命性新技术所带来的变化时如何思考正确的问题和优先事项。
在充分反思自动驾驶汽车的潜力与局限之后,多伦多市交通服务局总经理巴克利意识到多伦多需要主动追求想要的未来,而不是被动地让技术决定城市的未来。于是他将自动驾驶汽车工作组的讨论重心从最初的焦点——自动驾驶汽车对多伦多意味着什么,转向另一个问题——我们如何规划和影响自动驾驶汽车的发展。原因何在?正如巴克利所言,“我们不能让技术之尾摇晃城市之头”。
巴克利认为,在思考多伦多如何规划和影响自动驾驶汽车所采取的形式时,其关键在于思考——“这些系统有哪些好处?有哪些潜在的负面影响?如何构建这些系统,从而能够从中获得尽可能多的好处,并在未来免遭问题之苦”。巴克利在多伦多市交通服务局的同事瑞安•蓝侬指出,“多伦多对未来城市的构想富有远见—— 一个更加公平的城市,一个可持续发展的城市,一个经济不断发展的城市”。多伦多过去十年主要投资于公共交通和可步行性,而不是开发新设施或增加汽车容量。蓝侬解释说:“我们希望减少交通拥堵,希望并鼓励人们使用公共交通,希望多伦多成为一个更宜居的城市,希望街道更具吸引力。”
巴克利和蓝侬领导的自动驾驶汽车工作小组,开始评估自动驾驶汽车如何推进多伦多的优先事项。他们分析了自动驾驶汽车各种所有权模式的利弊:私人所有权(就像今天人们拥有自己的汽车)以及共享按需使用(例如优步)。虽然这两种模式都能带来安全益处,但巴克利解释说:“共享模式比自动驾驶汽车私人所有模式更好。”按需自动驾驶汽车更有可能减少在市中心停车的需求,减少在途汽车数量,并增加无车人士出行的机动性。自动驾驶汽车私人所有虽然可以提高道路的通行能力,但也会使出行时间加长、路上零载客汽车增多,从而导致城市进一步扩张。
工作小组还规划了自动驾驶汽车的未来,更多地着眼于基础设施。这样无论自动驾驶汽车以何种方式被拥有,多伦多都可以利用该技术的优势。为了使自动驾驶汽车更安全,多伦多正在评估改善路面标识的必要性,并研究以无线宽带传输信号的交通信号灯,而不是要求汽车必须具有直接视线。为了在适当时机对停车空间进行改造,多伦多正在评估停车基础设施和相关法规。
与此同时,自动驾驶汽车工作小组继续通过情景规划活动加强讨论和研究,并教育政府官员。计划在2020年启动一个试点项目,利用自动驾驶汽车作为往返于公交车站的穿梭巴士,从而提高交通可达性。
通过采用这些方法,多伦多正在超越智慧城市和愚蠢城市的错误二分法,既不毫无保留地接受自动驾驶汽车,也不完全拒绝,而是坚持城市规划和交通目标,同时探索技术提供的实现机会。
交通行业发展的过去与未来,说明了为什么戴上技术障目镜追求新技术是危险的。首先,技术障目镜盲目地把技术等同于创新和进步。假如一个复杂问题可以很轻易地用技术解决,我们就容易忽视更系统的变革,不去充分思考应该创建什么样的城市以及自动驾驶汽车如何支持目标城市的实现,反而只考虑让现有城市迎合自动驾驶汽车的效率要求。尽管自动驾驶车辆可以带来显著好处(例如提高安全性和机动性),就像一个世纪前机动车辆带来的重大进步一样,但是城市不仅仅是由高效的交通流所定义的。对汽车(无论自动驾驶与否)的过度关注转移了我们对城市整体宜居性的需求,也分散了我们对改善流动性的其他策略的注意力——公共交通、密集发展和拥挤定价,更不用说对用户友好的应用程序和更好的儿童保健等。
汽车发展的历史教训告诉我们,社会规范围绕着某一特定技术这一事实并不意味着这一技术就是最优解,里面包含闭合(如街道被“诱导”为汽车设计的,而妨碍行驶的行人是令人头疼的“乱穿马路者”)的危险。历史学家托马斯•米萨解释说:“闭合的发生并非因为一个完美解决方案的出现,而是因为一个社会群体认为问题已经解决了。”米萨补充道,“闭合可能会模糊备选方案,因而使特定人造物品似乎是必需的或是有逻辑的”。从这个意义上说,我们可以把技术障目循环的“强化”阶段,视为与技术障目镜所鼓吹的特定技术相关的一种闭合形式。
由于拥抱次优技术之后的闭合会使我们对更好的替代方案视而不见,并陷入有害的实践当中,故而我们必须拒绝为了自动驾驶汽车而设计城市。随着自动驾驶车辆现身于城市街道,一个新的“灵活解释”阶段开始出现。鉴于“当一件人造物品尚为新奇之时,其解释的灵活性往往最大”,我们在未来几年的决策将塑造几十年后的城市。如果我们把城市想象为只有自动驾驶汽车才能解决交通优化问题,我们很可能会动摇正在形成的共识,即城市应该培育密集、适宜步行的社区,而不是引入一种迎合自动驾驶汽车的城市设计的新范式。我们越是为无处不在的汽车而设计城市社会,等我们终于意识到问题所在时,追求美好城市愿景将变得越发困难。
技术障目镜的第二个危险,是优化和效率往往将政治决策伪装成客观的技术决策。当我们将复杂的社会问题误认为是技术问题时,我们会根据纯粹的技术标准来评估解决方案,而忽略其政治后果。政治辩论被简化为关于效率的狭义的技术讨论。
这种方法忽视了提高社会局部效率的整体影响。尽管交通工程师被认为是中立的,因为他们采用了“科学”方法,他们的模型优化了汽车的效率,但却忽视其他街道使用者对社会的革命性影响。同样,今天优化自动驾驶汽车的模型被认为是“客观”的乌托邦,但其实忽视了顺畅交通之外的社会影响,这实际上意味着城市将优先考虑自动驾驶汽车的需求并为之改变,而未考虑行人和社区的需求。
将社会问题视为技术挑战还有利于企业推进其自身利益,而且不会显得有党派之争。正如20世纪的汽车工业为“汽车时代”贴上自由和人人值得拥有的标签,今天的科技公司也将“智慧城市”宣传为一种提高效率和改善日常生活的科学方法。既然我们已经认识到汽车时代的真正鼓吹者和一味追求汽车所造成的不幸后果,我们也应该对智慧城市及其承诺背后的议题持怀疑态度。
足够智慧的城市必须忠于城市的优先等级,吸收新技术的好处,而不应沦为技术至上主义的牺牲品。为了避免重复20世纪的错误,我们必须摘下技术障目镜,放弃对自动驾驶汽车不切实际的、乌托邦式的愿景。只有认识到技术的局限和风险,我们才有希望获得技术的好处。
猜你喜欢
智慧少年·故事叮当(2021年1期)2021-01-16
童话世界(2020年32期)2020-12-25
学生天地(2020年5期)2020-08-25
好孩子画报(2019年5期)2019-06-13
小学生导刊(2018年16期)2018-07-02
小天使·一年级语数英综合(2017年3期)2017-04-25
莫愁(2017年9期)2017-04-07
汽车博览(2016年9期)2016-10-18
琴童(2016年7期)2016-05-14
小猕猴学习画刊(2015年4期)2015-05-05