基于机器视觉智能机器人高速搬运控制系统的设计
2021-11-12 07:23李和仙林宗德胡志超
沈阳工程学院学报(自然科学版) 2021年4期
李和仙,林宗德,胡志超
(闽南理工学院 实践教学中心,福建 石狮 362700)
随着制造业智能化转型的推进及新型项目的应用,在当前的现代化发展过程中,以智能机器人自身发展为动力,坚持新理念——机器视觉技术引领新机器人,采取机器视觉技术与机器人技术的策略,使柔性化与自动化“合二为一”。机器视觉技术的应用,改变传统机器的点位运动控制方式,摆脱固有的初始位置、中间位置、终止位置的三位模式[1]。该机器视觉智能机器人不仅把传统机器人的简单搬运转变成高速搬运,而且具备质检视觉功能。
1 机器视觉技术
机器视觉技术作为工业机器人的眼睛和大脑,在人机结合的同时,依靠QD75 定位模块精准定位,通过内外部传感器,进行图像采集、处理、分析,对工件识别定位,并检测相关特征(速度、位置、颜色、形状、重量、距离等)[2]。当对射式光电传感器检测到信号时,利用两个电荷耦合器件(CCD)完成角度智能检测,经图像处理、分析后输出至PLC智能模块,如图1所示。
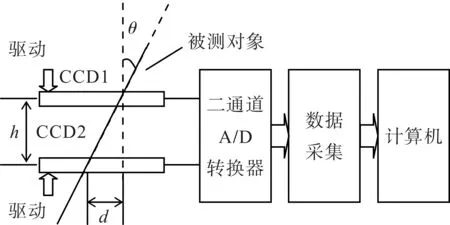
图1 利用两个CCD完成角度智能检测
2 机器人的定位模块
整个智能系统如图2 所示,由对射式光电传感器、视觉相机、PLC 智能模块(QD75 定位模块)、伺服放大器、搬运机器人等几部分组成,其主要元器件型号如表1 所示。利用两个CCD 完成角度智能检测,视觉处理和分析后传输至PLC 智能模块。根据信号反馈,为了满足控制系统的高速运行[3],设置QD75 参数时,基本参数1 中的单位参数设为3:pulse,每转的脉冲数和移动量参数都设为3 600 pulse;基本参数2中的加速度时间、减速度时间参数设为1 ms;详细参数2的加速度时间1、加速度时间2、减速度时间1、减速度时间2 参数设为1 000 ms,JOG速度限制值参数设为20 000 pulse/s,JOG 运行加速时间和JOG 运行减速时间选择参数都设为0:1,快速停止减速时间参数设为1 000 ms,定位完成信号输出时间参数设为300 ms;原点回归基本参数的原点回归速度和爬行速度参数都设为5 000 pluse/s,偏差计数器清除信号输出时间参数设为11 ms。
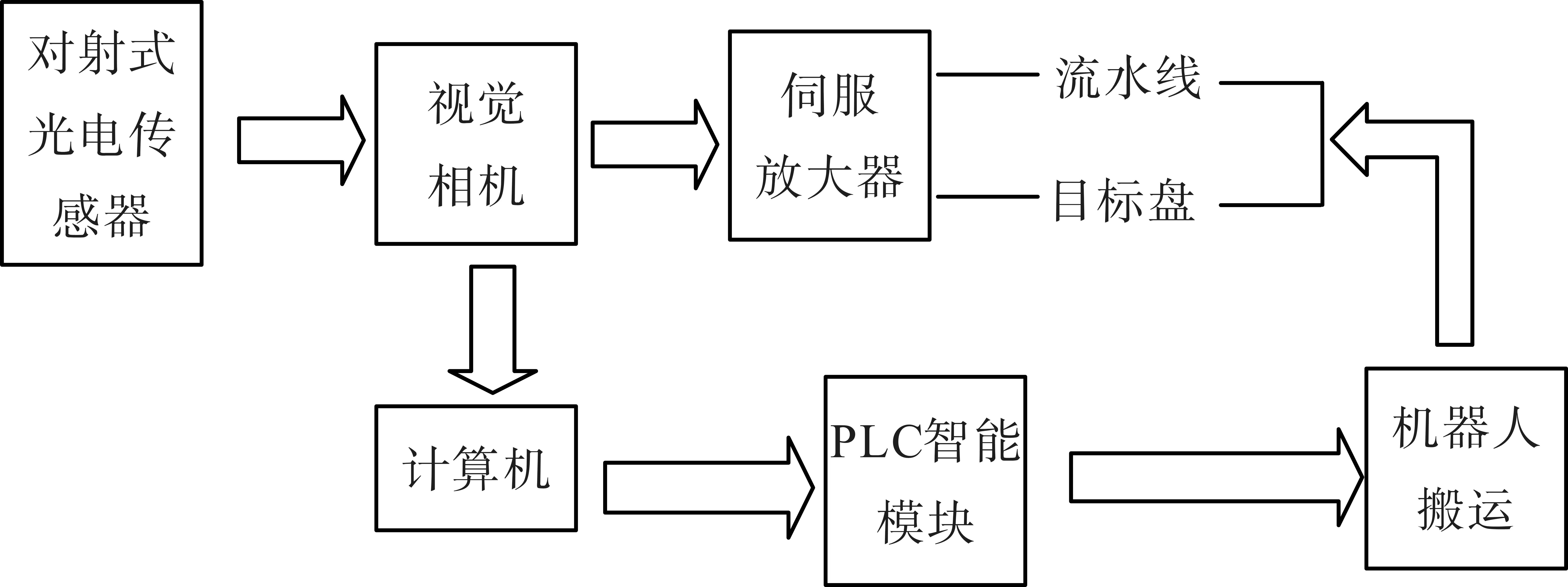
图2 智能控制系统
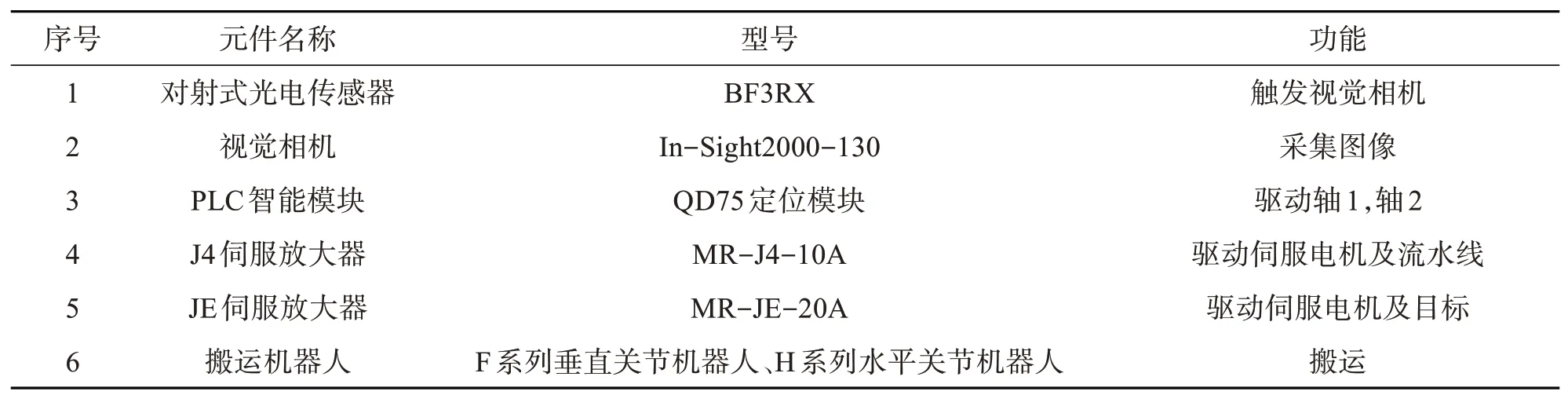
表1 主要元器件
3 运动控制系统
3.1 信号目标位置
当目标盘机构上的对射式光电传感器检测到信号,同时视觉相机检测到目标的位置[4]时,PLC智能模块能记录下当前的位置。设流水线速度为v,检测到第1 个信号图像采集至完成搬运的时间为t1,则信号搬运前的位置坐标为(x1,y1),信号搬运后的位置坐标为(x1,y1+vt1)。以此类推,第n个信号图像采集至完成搬运的时间为tn,则信号搬运前的位置坐标为(xn,yn),信号搬运后的位置坐标为(xn,y1+vtn),具体如表2所示。
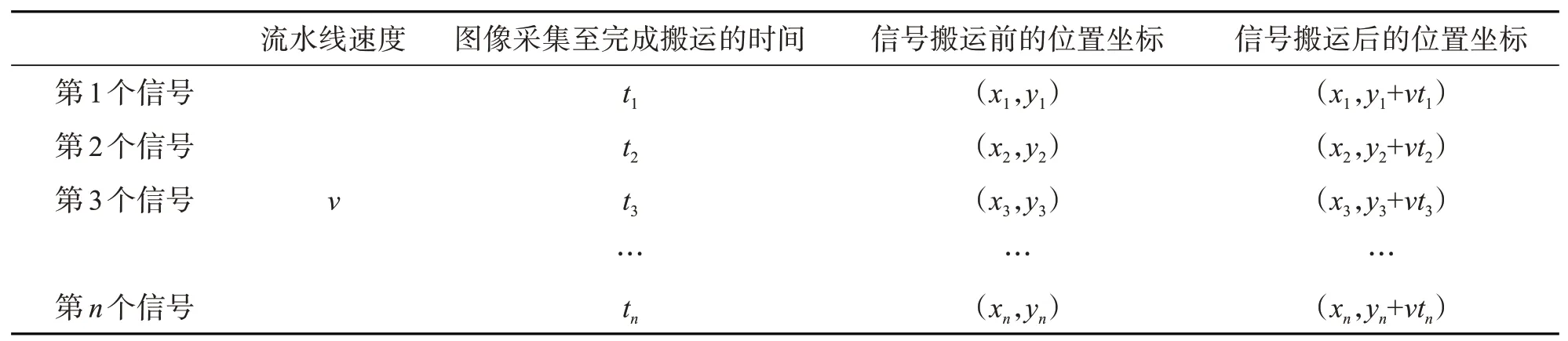
表2 信号的坐标位置
3.2 信号系统控制
信号目标位置确定后传送至PLC系统,PLC系统将目标盘当前的位置和补偿厚度位置处理后,得到最佳位置,然后将垂直关节机器人、水平关节机器人旋转至该位置,PLC发出“释放元件”信号。由于三菱工业机器人程序是按步执行的,所以当工业机器人程序执行到“等待释放手抓”信号时,PLC发出“释放元件”信号才是有效的,其他时候是无效的[5]。系统控制电路如图3 所示。部分PLC 程序如图4 所示[6],其中M0、M2 控制人机界面的启动,工业机器人高速搬运系统初始化,SM400 读取信号位置信息,将位置信息传送至M4、X26,然后对信号进行检测处理,处理后的信号Y32 输出,最后M6、Y3E复位。
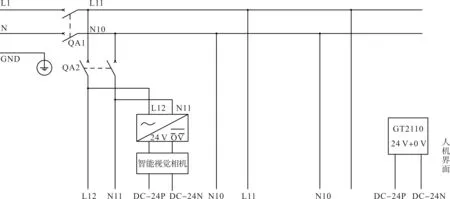
图3 系统控制电路
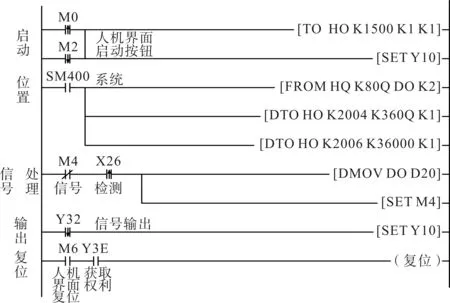
图4 部分PLC程序
3.3 目标盘、流水线系统控制
QD75 定位模块安装到伺服放大器MR-J4-20A 模块上。视觉相机对信号进行检测处理后,经计算机处理分析,传送至PLC 智能模块(QD75 定位模块)和伺服放大器。QD75 定位模块以差动输出模式把脉冲输出给机器人,对目标盘、流水线系统进行控制,机器人执行搬运动作[7]。伺服放大器MR-J4-20A 模块有32 个I/O 点,而机器人的X轴、Y轴对多个定位数据进行设定。偏差计数器将QD75 定位模块采集的脉冲信号串进行积累和反馈,并发送到D/A 转换器中,D/A 转换器将差值脉冲信号转化为直流模拟电压,使之成为控制伺服电机的速度控制指令,经伺服放大器MR-J4-20A 的偏差计使电机保持运行状态。电机转速受偏差计数器的累积脉冲影响,当偏差计数器的累积脉冲减少时,转速变慢;当偏差计数器的累积脉冲为0 时,电机停止运行。故QD75 定位模块和伺服放大器MR-J4-20A 能支持2 轴进行高速的独立定位动作和连续定位动作的插补,还为机器人原点回归控制、快速原点回归及原点回归重试提供6 种控制方式[8],丰富的高速控制功能使其高速化和通讯远程化。QD75 定位模块和伺服放大器MR-J4-20A 的控制电路如图5所示。
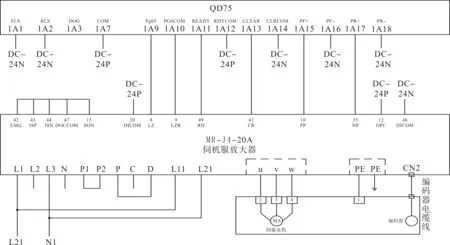
图5 QD75定位模块和伺服放大器MR-J4-20A控制电路
4 结语
综上所述,将机器视觉技术与机器人相结合,相比以往的工业机器人有很大的改变。机器视觉技术的应用为机器人柔性化生产提供有力的后盾。采用QD75 定位模块和伺服放大器MR-J4-20A 对视觉技术系统和运动系统数据的分析,建立视觉识别坐标信息与定位。该机器人控制系统能实现一个较完善的视觉机器人高速搬运控制功能。
猜你喜欢
环球时报(2022-07-13)2022-07-13
中学生数理化·七年级数学人教版(2022年6期)2022-06-05
商界评论(2022年1期)2022-04-13
环球时报(2022-03-14)2022-03-14
导航定位与授时(2020年5期)2020-09-23
学生天地(2020年6期)2020-08-25
铁道通信信号(2020年9期)2020-02-06
中国外汇(2019年20期)2019-11-25
电影(2018年8期)2018-09-21
中国新技术新产品(2014年6期)2014-03-25