
无人机翼伞回收系统刚柔耦合动力学建模方法
2021-11-11 02:28:32吕斐凯贺卫亮
航天返回与遥感 2021年5期
吕斐凯 贺卫亮
无人机翼伞回收系统刚柔耦合动力学建模方法
吕斐凯 贺卫亮
(北京航空航天大学,北京 100191)
利用可控翼伞实现固定翼无人机的精确回收具有十分广阔的应用前景。然而,由于无人机与翼伞之间的相对运动,柔性伞绳随时发生变化,导致现有基于刚性假设的动力学模型不能准确地反映无人机与翼伞之间的约束关系。为了解决这个问题,文章提出了一种基于柔性伞绳的翼伞-无人机系统多体动力学建模方法:假设翼伞和无人机之间由多根抗拉不抗压的弹性绳单元连接,建立相应的柔性伞绳动力学模型;再结合翼伞和无人机的运动方程,推导出翼伞-无人机系统的刚柔耦合动力学模型。通过与8自由度模型的对比发现,当控制输入较大时这种耦合模型更能反映翼伞-无人机系统的运动情况。
刚柔耦合 多体模型 动力学建模 翼伞-无人机系统 翼伞回收
0 引言
伞降回收是一种无人机的常用回收方式,具有质量轻、包装体积小、成本低廉、对其他系统依赖程度低等优点。无人机的伞降回收一般采用圆形伞或十字形伞,这些降落伞对环境的敏感度高,缺乏主动控制能力,在环境风的影响下往往会导致无人机的着陆位置远远偏离预定目标,在海洋、山地、沼泽、森林等复杂地形条件下很难实现无人机的安全着陆[1-2]。翼伞是一种特殊的可控式滑翔降落伞,通过对左右操纵绳的控制,可以进行滑翔、转弯和雀降等多种机动,具备克服风场干扰、实现精确着陆的能力[3]。近些年来,翼伞在跳伞救生、物资投送等领域的应用已经十分成熟,在无人机回收方面也有数起成功实例[4-6]。但是,翼伞与无人机之间复杂的动力学问题仍给回收系统的设计带来了困难,制约了无人机翼伞回收技术的发展。
为了分析翼伞与无人机之间的相对运动特性,国内外纷纷开展了无人机翼伞回收系统动力学建模的研究。目前,大多数的研究成果都是基于常规物-伞系统的建模思路,即考虑连接的伞绳和吊带皆为刚性。例如,文献[7]中假设翼伞与无人机之间为刚性连接,推出了翼伞-无人机系统的6自由度模型;文献[8-9]将翼伞与无人机之间的连接关系简化为带有滚转约束的刚性铰接,并推出了系统的8自由度模型;文 献[10]额外考虑了刚性铰接中的相对滚转运动,将系统的动力学模型改进为9自由度模型。对于相对运动较小的物-伞系统而言,现有的建模方法可以基本满足回收系统设计的要求;但是,对于相对运动较大的翼伞-无人机系统,伞绳可能发生无法忽略的形变甚至出现松弛,将难以准确地反映系统的真实运动状态。因此,基于刚性连接的翼伞-无人机系统动力学模型存在一定的局限性。
为了可以准确地模拟翼伞-无人机系统的运动状态,本文提出了一种基于柔性伞绳的刚柔耦合动力学建模方法。假设翼伞与无人机之间由多根抗拉不抗压的绳弹性单元组成,根据系统的吊挂方式建立相应的柔性伞绳模型;结合翼伞和无人机的运动方程,推导出翼伞-无人机系统的刚柔耦合动力学模型。通过对该模型的仿真,可以得到机动飞行状态下翼伞和无人机的运动特性以及伞绳张力变化,为回收系统的设计提供了一定的参考。此外,与8自由度模型的比较也可以验证伞绳的柔性特性对翼伞和无人机之间相对运动的影响。
1 动力学建模
根据翼伞-无人机系统的组成,按照多体动力学建模的思路[11-12],其动力学模型可以分为翼伞模型、无人机模型和伞绳模型三个部分,如图1所示。图1中,bbb定义为无人机模型的体坐标系,ggg为大地坐标系,ppp为翼伞模型的体坐标系,其中1,2分别位于翼伞左侧翼尖的前缘和后缘,1,2分别位于翼伞右侧翼尖的前缘和后缘,1,2位于翼伞中幅的前缘和后缘,1,2,3和4分别为伞绳与无人机的连接点。各个模型具体的建模方法如下。
1.1 翼伞模型
翼伞模型体坐标系ppp原点位于翼伞的质心;p轴沿翼伞弦线,指向前缘;p轴垂直于纵向对称面,指向右翼;p轴与p轴、p轴相互垂直,共同构成右手坐标系。假设系统中的翼伞为刚体,其在飞行过程中主要受到自身重力、气动力、伞绳拉力和附加质量力的作用。基于其受力分析,由动力学方程和运动学方程组成的翼伞模型为:


对于小质量、大体积的翼伞而言,附加质量对动力学特性的影响无法忽略[13-14]。若不考虑翼伞弧形对附加质量的影响,则模型中附加质量力和力矩的计算公式为:

根据文献[15],翼伞模型中气动力和气动力矩的计算公式分别为:



表1 翼伞气动导数
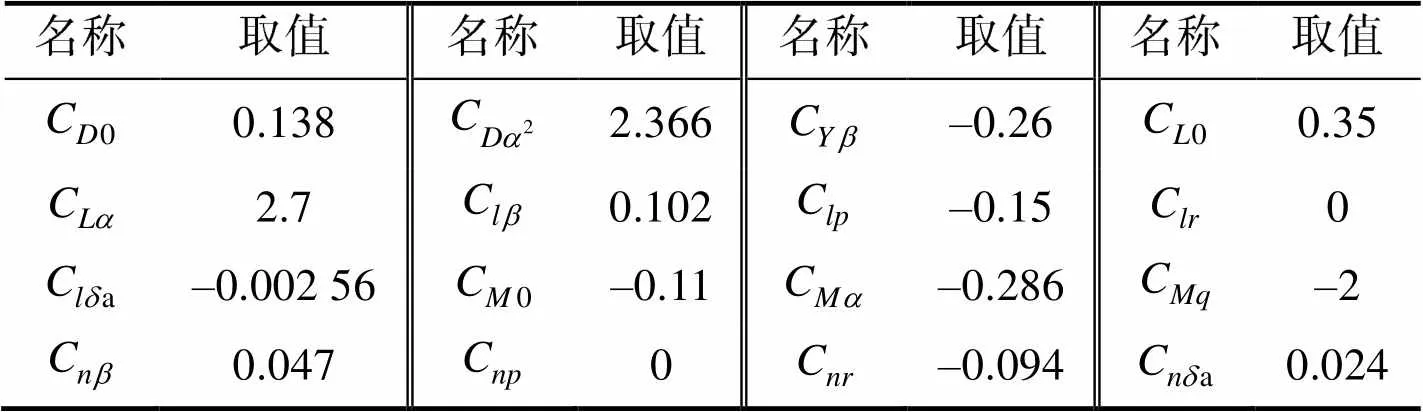
Tab.1 Parafoil aerodynamic coefficients
1.2 无人机模型
bbb体坐标系原点位于无人机的质心;b轴沿无人机机身纵轴指向前;b轴垂直于纵向对称面指向右翼;b轴与b轴、b轴垂直,构成右手坐标系。在飞行过程中,无人机主要受到重力、气动力以及伞绳拉力的作用。基于受力分析,由动力学方程和运动学方程组成的无人机模型为:


根据文献[18],无人机气动力和气动力矩的计算公式为:




表2 无人机气动导数
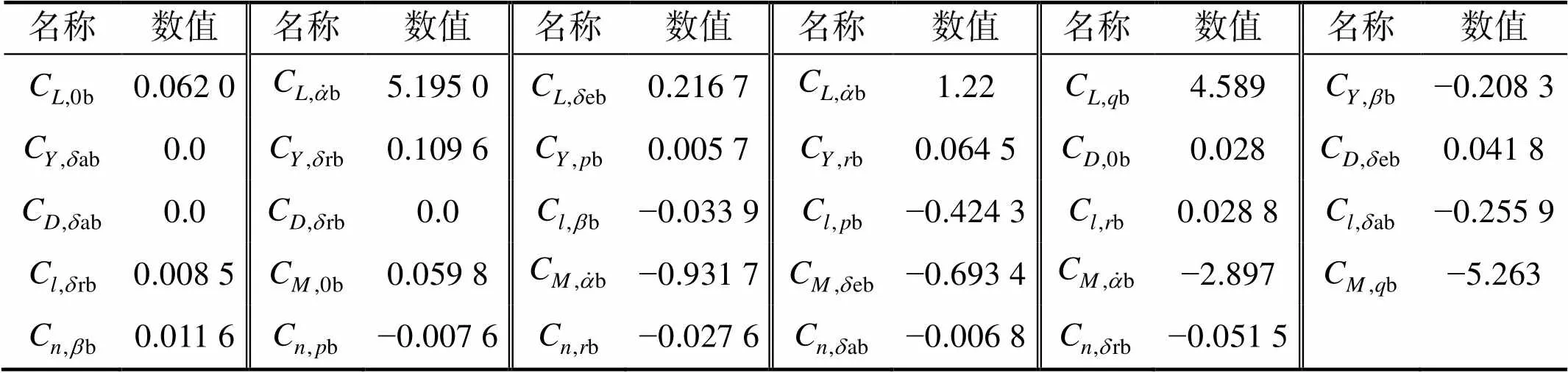
Tab.2 UAV aerodynamic coefficients
1.3 伞绳模型
在现有的回收系统模型中,往往将翼伞与无人机之间的连接简单地考虑为单点铰接或单点弹簧连接,忽略了伞绳的形变以及伞绳吊挂方式对翼伞和无人机之间相对运动的影响。为了更准确地模拟翼伞和无人机之间的约束关系,将所有伞绳以及连接无人机的吊带假设为只能承受拉力不能承受压力的弹性绳单元,并且根据系统的两点吊挂方式,定义4根伞绳单元连接翼伞左侧,4根连接翼伞右侧,还有4根连接无人机机身。所有伞绳单元分别汇交到左右两侧的质点1和2上。基于两质点的受力分析,伞绳模型的动力学方程为



1.4 刚柔耦合动力学模型
由于伞绳单元内力大小等于伞绳对翼伞或无人机的作用力,可以将翼伞与无人机的动力学方程通过伞绳的质点动力学方程结合起来,经整理后得到刚柔耦合动力学方程的矩阵形式,方程具体形式为


2 仿真与分析
根据上述翼伞-无人机系统的刚柔耦合动力学方程,在MATLAB中完成基于柔性伞绳连接的翼伞-无人机系统模型搭建,将现有基于刚性假设的8自由度模型扩展至18自由度。为了分析伞绳形变对系统动力学特性的影响,本文同时建立了基于刚性假设的8自由度仿真模型,比较了刚柔耦合模型与8自由度模型的纵向运动特性和横向运动特性。仿真采用的翼伞为常规方形翼伞,其与无人机的几何参数如表3所示。仿真前,系统的初始飞行高度为1 000m,两吊点间距为0.5m,飞行速度为10m/s,且翼伞和无人机的欧拉角皆为0°,整个过程暂不考虑风场的影响。
表3 系统几何参数

Tab.3 System geometric parameters
首先,分析两种模型在翼伞操纵绳控制下的基本运动情况。图2(a)为对两种模型施加的操纵绳控制量(以翼伞右侧后缘下偏为正),图2(b)为两种模型在该控制指令作用下的运动轨迹。从图2中可以看出,1~2阶段耦合模型和8自由度模型具有基本相同的运动轨迹;2~3阶段,当输入的控制量为负时,两种模型同时左转,当输入的控制量为正时,模型又同时进行右转;3~4阶段,当控制量归零,两种模型重新做直线运动。耦合模型和8自由度模型对于同一控制指令的动力学响应十分相似。但是,仔细比较两种模型的运动轨迹仍可以发现相互之间存在一定的差异。

图2 控制输入和模型轨迹对比
对耦合模型中伞绳的形变进行分析,结果如图3所示。可以看出在图2(a)所示的控制输入作用下,所有伞绳单元都有一定程度的伸长和缩短。当左侧操纵绳下拉时,翼伞相对无人机产生逆时针的滚转和偏航,导致翼伞右侧前缘伞绳11、11伸长,左侧前缘伞绳12、12缩短,使1和2点发生前移和后移,产生相对扭转。连接点的扭转进一步引起无人机上21和32绳单元的伸长,对无人机产生逆时针的扭转力矩,使无人机随翼伞一起发生滚转和偏航。翼伞通过伞绳单元伸长缩短引起的内力变化来牵引无人机发生相应的姿态改变。此外,伞绳的形变还会改变翼伞和无人机之间的约束关系,这也是导致耦合模型和8自由度模型在动力学响应上存在差异的主要原因。
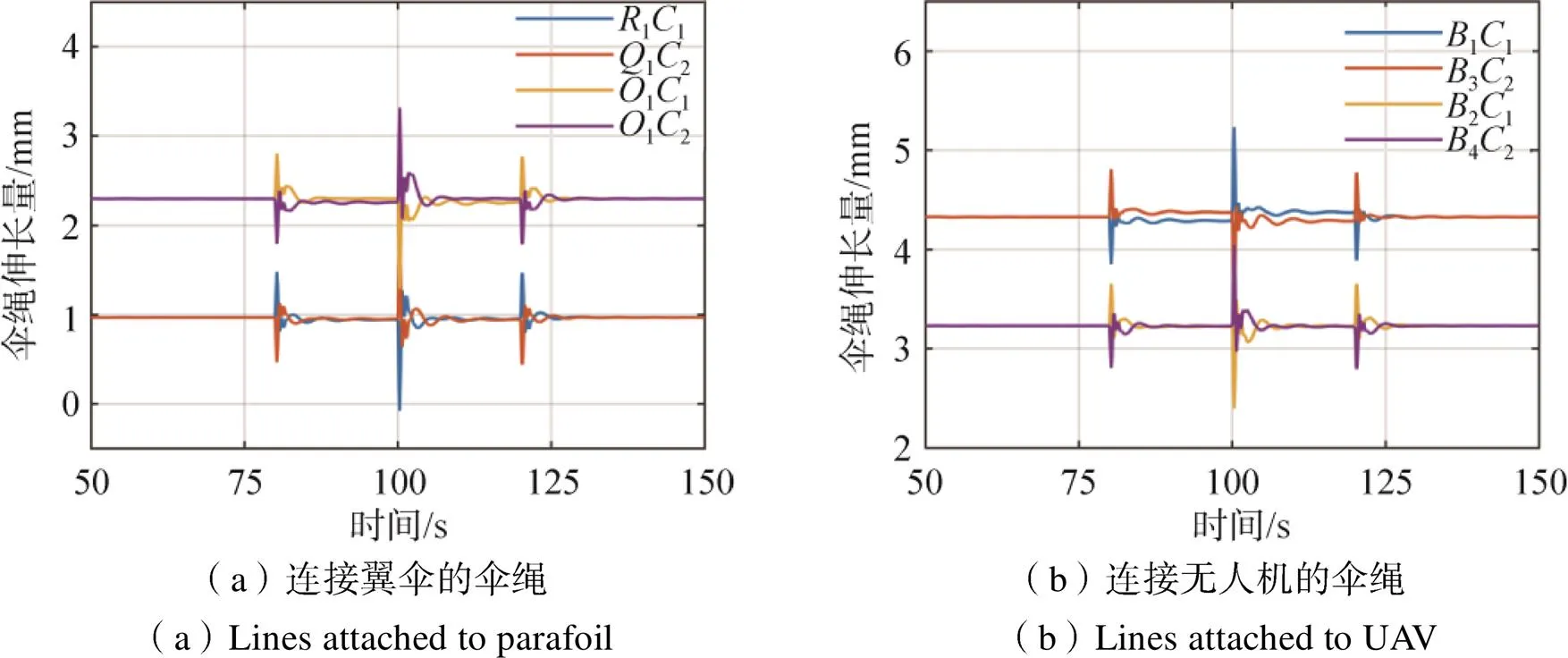
图3 伞绳形变
2.1 系统运动特性分析
为了详细比较耦合模型与8自由度模型在纵向运动特性和横向运动特性上的不同,文中分别计算了两种模型在无人机升降舵控制作用下的俯仰运动情况以及在副翼和方向舵控制作用下的滚转运动情况和偏航运动情况,具体的比较结果如下。
(1)纵向运动对比
仿真过程中分别在50s、100s和150s时输入无人机升降舵下偏的控制,输入的控制量依次为8°、16°和24°。相应的翼伞和无人机俯仰运动仿真结果如图4所示。从图4中可以看出,对于不同的升降舵控制量,耦合模型和8自由度模型的翼伞俯仰角变化以及无人机俯仰角变化基本保持一致,两种模型在纵向运动特性上并没有明显的差异。这说明伞绳的柔性对翼伞-无人机系统纵向运动特性影响很小,可以忽略不计。
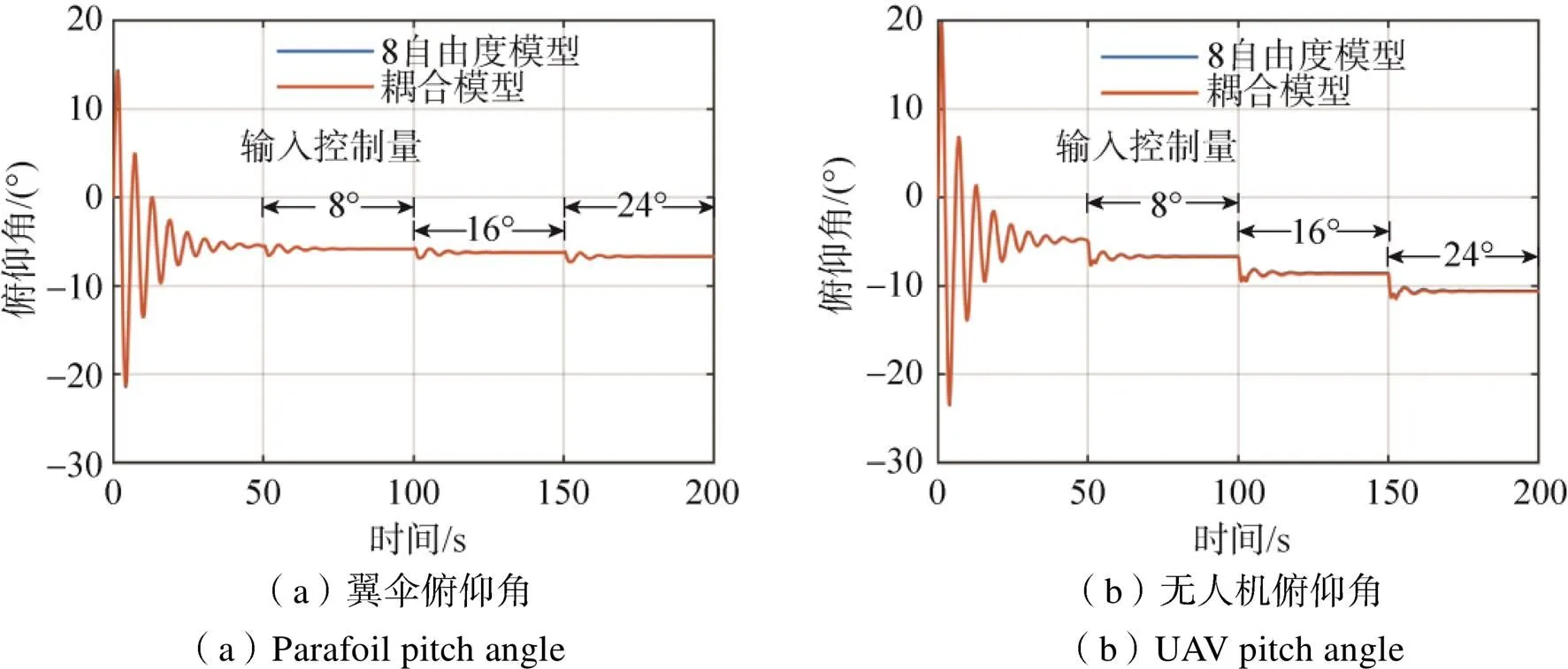
图4 两种模型俯仰运动的比较
(2)横向运动对比
翼伞-无人机系统的横向运动包含滚转方向的运动和偏航方向的运动。为了分析两种模型在滚转运动上的区别,分别在50s、100s和150s时输入无人机右侧副翼下偏的控制,输入的控制量依次为10°、20°和30°。两种模型相应的翼伞和无人机滚转角变化如图5所示。在右侧副翼下偏的作用下,两种模型的滚转角都发生减小,且两种模型之间的滚转角偏差随着控制量的增大而逐渐增大。对比图5(a)和(b)还可以看出,8自由度模型中翼伞与无人机之间的相对滚转角不随控制量的增加而增加,基本为0°;而耦合模型中的相对滚转角随着副翼控制量的增大而明显增大。在30°副翼舵偏角时,耦合模型的相对滚转角达到4.4°。两种模型在滚转方向的运动差异较为明显。

图5 两种模型滚转运动的比较
为了分析两种模型在偏航运动上的区别,分别在50s、100s和150s时输入方向舵左偏的控制,输入的控制量依次为20°、40°和60°。模型相应的翼伞和无人机偏航角速度以及相对偏航角变化如图6所示。在方向舵左偏的影响下,如图6(a)所示,两种模型都进行逆时针的螺旋圆周运动且偏航角速度的变化十分相近。而从图6(b)中可以看出,耦合模型和8自由度模型在小控制量时相对偏航角较为相近;但是,当控制量较大时,模型之间的相对偏航角差异十分明显。这是由于在大控制量影响下,翼伞和无人机之间的相对运动过大,导致部分伞绳出现松弛,大幅改变翼伞和无人机之间的约束情况,从而进一步加剧翼伞和无人机之间的相对运动。因此,在大控制量情况下,耦合模型的仿真结果比8自由度模型的结果更为准确有效。

图6 两种模型偏航运动的比较
2.2 伞绳张力分析
系统中,翼伞与无人机通过伞绳相连,两者之间的相互作用以伞绳张力变化的形式相互传递。但是,由于伞绳只能承受拉力无法承受压力,翼伞和无人机之间过大的相对运动会导致伞绳产生松弛,改变翼伞和无人机之间的相互约束关系。若伞绳松弛的数量过多,整个回收系统将不再保持自身的稳定。因此,伞绳的张力变化情况可以用来判断无人机翼伞回收系统设计的可靠性与安全性。
耦合模型中伞绳单元的张力与翼伞操纵绳控制量的关系如图7所示。随着操纵绳控制量的增大,多根伞绳单元的张力开始减小。当操纵绳的控制量增大到0.33m时,伞绳单元12的张力首先减小到0N,伞绳的约束发生明显改变。这个状态下,虽然系统仍能平稳,但其收敛速度已经出现减缓。当控制量超过0.35m时,系统完全发散。因此,基于回收系统的安全性和稳定性考虑,翼伞操纵绳的最大控制量应当不超过0.33m。

图7 随翼伞操纵绳变化的伞绳张力
同理,利用伞绳的张力变化可以设计无人机副翼的控制区间。图8为所有伞绳单元的张力与副翼舵偏角之间的关系。随着副翼舵偏角的增大,部分伞绳单元的张力逐渐减小。当副翼舵偏角达到32°时,伞绳单元22、11和11上的张力减小到0,伞绳出现松弛;当舵偏角超过32°时,系统完全发散。因此,副翼的最大控制区间可以设计为0°~32°。

图8 随副翼舵偏角变化的伞绳张力
文中为了进一步研究吊带间距对伞绳张力变化的影响,分别建立了吊带间距为400、420、460和500mm的翼伞-无人机系统模型,并进行模拟仿真,各系统的伞绳张力仿真结果如 图9所示。可以看出:在同一翼伞控制量作用下,伞绳单元上的张力随着吊带间距的增大而增大;此外,翼伞操纵绳的最大控制量也随吊带间距的增大而增大。当吊带间距为400mm时,系统的操纵绳最大控制量为0.24m;当吊带间距为500mm时,操纵绳的最大控制量为0.33m。以上结果表明伞绳的连接方式会影响翼伞-无人机系统的控制性能。

图9 吊带间距的影响
3 结束语
本文针对无人机翼伞回收系统中的相对运动问题,结合多体建模的思路,详细推导并建立了一种基于伞绳柔性的刚柔耦合动力学模型。为了分析伞绳柔性对动力学特性的影响,将耦合模型的仿真结果与8自由度模型进行比较。比较结果表明:在纵向运动上,两种模型对于控制的响应十分相近;而在横向运动上,两种模型的仿真结果有较为明显的差异,相互之间的偏差会随着控制输入的增大而增大。耦合模型在控制输入较大的情况下更能反映系统的真实运动状态。此外,通过对模型中伞绳张力的研究,设计了翼伞-无人机系统控制机构的最大控制区间,分析了伞绳连接方式对系统控制能力的影响。本文得到的结果可以为无人机翼伞回收系统的可控性及安全性设计提供一定的参考。
[1] 谭立国, 杨小艳, 宋申民. 面向小型舰船的固定翼无人机海上回收方法综述[J]. 哈尔滨工业大学学报, 2019, 51(10): 1-10. TAN Liguo, YANG Xiaoyan, SONG Shenmin. An Overview of Marine Recovery Methods of UAV for Small Ships[J]. Journal of Harbin Institute of Technology, 2019, 51(10): 1-10. (in Chinese)
[2] SHAO Pengyuan, WU Chengfu, MA Songhui. Research on Key Problems in Assigned-point Recovery of UAV Using Parachute[C]// 2013 IEEE International Conference of IEEE Region 10 (TENCON 2013). Xi’an, China, IEEE, 2013.
[3] YAKIMENKO O A. Precision Aerial Delivery Systems: Modeling, Dynamics, and Control[M]. Reston, VA, USA: AIAA, 2015: 16-44.
[4] WYLLIE T. Parachute Recovery for UAV Systems[J]. Aircraft Engineering and Aerospace Technology, 2001, 73(6): 542-551.
[5] WYLLIE T, DOWNS P. Precision Parafoil Recovery-providing Flexibility for Battlefield UAV Systems[C]//14th Aerodynamic Decelerator Systems Technology Conference. San Francisco, CA, USA. AIAA, 1997.
[6] BROWN G, HAGGARD R, FOGLEMAN J. Parafoils for Shipboard Recovery of UAVs[C]//11th Aerodynamic Decelerator Systems Technology Conference, April 9-11, 1991, San Diego, CA, USA. AIAA, 1991.
[7] 王帝, 滕海山, 吴世通. 用于无人机精确着舰的翼伞归航控制方法[J]. 航天返回与遥感, 2017, 38(3): 43-52.
WANG Di, TENG Haishan, WU Shitong. Homing Method of Controllable Parafoil for Landing of UAV on Deck[J]. Spacecraft Recovery & Remote Sensing, 2017, 38(3): 43-52. (in Chinese)
[8] WISE K A. Dynamics of a UAV with Parafoil under Powered Flight[C]//AIAA Guidance, Navigation, Control Conference, August 21-24, 2006, Keystone, Colorado CO, USA. AIAA, 2006.
[9] REDELINGHUYS C. A Flight Simulation Algorithm for a Parafoil Suspending an Air Vehicle[J]. Journal of Guidance, Control and Dynamics, 2007, 30(3): 791-803.
[10] LI Mingjun, YAN Jianguo, LIU Yuan. Improved Digital Model of Parafoil-unmanned Aerial Vehicle Accurate Recycling System[C]//2016 IEEE Chinese Guidance, Navigation and Control Conference, August 12-14, 2016, Nanjing, China. IEEE, 2016.
[11] 蒋万松, 荣伟, 滕海山. 翼伞—载荷系统多体动力学仿真分析[J]. 南京航空航天大学学报, 2016, 48(4): 474-480.
JIANG Wansong, RONG Wei, TENG Haishan. Multibody Dynamical Simulation Analysis for Parafoil-payload System[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2016, 48(4): 474-480. (in Chinese)
[12] 陈建平, 宁雷鸣, 张红英. 基于多体动力学的大型翼伞系统飞行仿真分析[J].飞行力学, 2015, 33(6): 486-490.
CHEN Jianping, NING Leiming, ZHANG Hongying. Flight Simulation of Large Parafoil-payload Systems Based on Multibody Dynamics[J]. Flight Dynamics, 2015, 33(6): 486-490. (in Chinese)
[13] LISSAMAN P, BROWN G. Apparent Mass Effects on Parafoil Dynamics[C]//AIAA Aerospace Design Conference, February 16-19, 1993, Irvine, CA, USA. AIAA, 1993.
[14] BARROWS T. Apparent Mass of Parafoils with Spanwise Camber[J]. Journal of Aircraft, 2002, 39(3): 445-451.
[15] SLEGERS N J. Comparison of Parafoil Dynamic Modes with Varying Payload Connections[C]//24th AIAA Aerodynamic Decelerator Systems Technology Conference, June 5-9, 2017, Denver, Colorado, USA. AIAA, 2017.
[16] 朱虹, 孙青林, 邬婉楠. 伞翼无人机精确建模与控制[J]. 航空学报, 2019, 40(6): 122593.
ZHU Hong, SUN Qinglin, WU Wannan. Accurate Modeling and Control for Parawing Unmanned Aerial Vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(6): 122593. (in Chinese)
[17] 刘媛, 闫建国, 李明君. 冲压式翼伞气动性能研究[J]. 飞行力学, 2017, 35(3): 24-27, 36. LIU Yuan, YAN Jianguo, LI Mingjun. Research on Aerodynamic Performance of Ram-air Parafoil[J]. Flight Dynamics, 2017, 35(3): 24-27, 36. (in Chinese)
[18] JUNG D, TSIOTRAS P. Modeling and Hardware-in-the-loop Simulation for a Small Unmanned Aerial Vehicle[C]//AIAA Infotech@Aerospace 2007 Conference and Exhibit, May 7-10, 2007, Rohnert Park, CAA, USA. AIAA, 2007.
[19] 叶川, 马东立. 利用CFD技术计算飞行器动导数[J]. 北京航空航天大学学报, 2013, 39(2): 196-200.
YE Chuan, MA Dongli. Aircraft Dynamic Derivatives Calculation Using CFD Techniques[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(2): 196-200. (in Chinese)
[20] MONTALVO C, COSTELLO M. Avoiding Lockout Instability for Towed Parafoil Systems[J]. Journal of Guidance, Control and Dynamics, 2016, 39(5): 985-995.
[21] BOSCH A, SCHMEHL R, TISO P. Dynamic Nonlinear Aeroelastic Model of a Kite for Power Generation[J]. Journal of Guidance, Control and Dynamics, 2014, 37(5): 1426-1436.
Modeling of Rigid-flexible Coupling Dynamics for Parafoil-UAV Recovery System
LYU Feikai HE Weiliang
(Beihang University, Beijing 100191, China)
The application of a steerable parafoil in a unmanned air vehicle (UAV) recovery system is attractive. However, Since the interaction between the parafoil and the UAV, the length of suspension lines are variable. It induces the existing models based on the rigid assumption can not accurately simulate the constraint between the parafoil and the UAV. To solve this problem, this paper introduced a method based on the flexible line assumption for modeling parafoil-UAV system dynamics. The suspension lines are first modeled as several linear elastic elements. The parafoil and the UAV were then modeled as rigid bodies. According to this, the coupled rigid-flexible model can be derived. Compared with the 8-DoF model, this proposed model can well capture the basic motions of the parafoil-UAV system, especially under a considerable control input.
rigid-flexible coupling; multibody model; dynamic modeling; parafoil-unmanned air vechicle system; parafoil recovery
V212
A
1009-8518(2021)05-0001-11
10.3969/j.issn.1009-8518.2021.05.001
吕斐凯,男,1988年生,2014年获北京航空航天大学航天工程专业硕士学位,现在北京航空航天大学飞行器设计专业攻读博士学位。研究方向为飞行器设计、航天器再入与回收。E-mail:lvfeikai@163.com。
2020-05-01
国家重大科技专项工程
吕斐凯, 贺卫亮. 无人机翼伞回收系统刚柔耦合动力学建模方法[J]. 航天返回与遥感, 2021, 42(5): 1-11.
LYU Feikai, HE Weiliang. Modeling of Rigid-flexible Coupling Dynamics for Parafoil-UAV System[J]. Spacecraft Recovery & Remote Sensing, 2021, 42(5): 1-11. (in Chinese)
(编辑:夏淑密)
猜你喜欢
空气动力学学报(2022年4期)2022-08-23 06:51:26
数学物理学报(2022年2期)2022-04-26 14:08:28
新世纪智能(高一语文)(2020年9期)2021-01-04 00:42:52
中华诗词(2018年4期)2018-08-17 08:04:12
宝藏(2017年6期)2017-07-20 10:01:02
宝藏(2017年6期)2017-07-20 10:01:01
大型铸锻件(2015年5期)2015-12-16 11:43:20
浙江大学学报(工学版)(2015年2期)2015-05-30 07:04:53
火炸药学报(2014年1期)2014-03-20 13:17:22
计算物理(2014年2期)2014-03-11 17:01:51
