
气吸式排种器电驱动控制性能研究
2021-11-10 06:20:18芦昌雨
现代农机 2021年5期
芦昌雨 ,张 凯,2,洪 杨
(1 南京信息工程大学 自动化学院;2 南京信息工程大学 大气环境与装备技术协同创新中心:210044,江苏南京)
随着农业的发展,机械化播种作业正在逐渐代替人工播种,减少大量的人力和物力。精密播种机主要分为气动式和机械式两种[1],而气动式精密播种机又分为气压式、气吸式和气吹式[2],其中气吸式精密播种机因其吸种快、种子不易破碎、速度快等优点,在我国被大面积使用[3]。
精密播种的过程就是按精确的粒数、间距和播深,将种子播入穴孔中[4]。其技术核心,就是播种过程中外部控制驱动排种器转动,在不同的作业速度下自动调整和稳定控制播种株距[5]。因此,高速精密播种机最为重要的便是株距的调控[6]。但由于气候、地理等因素的影响,田间易产生泥泞不平、湿滑的情况[7],在播种过程中,播种机的地轮在泥泞的田中极易出现打滑的问题,这就导致播种机前进速度不稳定,与排种器排种的速度不能保持一致,播种距离不均匀,株距参差不齐,大大影响农作物的生长。
本文以气吸式排种器为研究对象,设计一套气吸式排种器电驱动系统,以随时调节株距,满足播种要求。
1 系统总体方案设计
本文设计的气吸式播种机株距电驱动控制系统用于株距的控制。气吸式排种器通过管道与风机相连,风机叶轮高速旋转产生负压,排种器的隔板将气吸室分为负压吸种区和零压排种区。大白菜种子在负压的作用下被吸附到排种盘的吸种孔上做圆周运动,当种子转出真空室后,由于负压的消失,其依靠自身重力或在刮种器作用下落入种沟内。
1.1 系统结构设计
该系统是一个具有智能化控制、软硬件结合和多协调性的综合性系统,主要由执行模块、采集模块和控制模块等三部分组成。采集模块主要器件包括旋转编码器和霍尔元件,用来将收集到的脉冲个数以数字信号(高速脉冲)的形式传送至控制器;控制模块主要器件是可编程控制器和人机交互触摸屏,使用者在人机交互界面上输入相关播种指标,控制器对收集来的信息进行分析处理,控制步进电机驱动排种器进行播种作业;执行模块主要由排种装置、步进电机及其驱动器组成,为排种器工作提供动力。三个模块之间协同工作、互相配合,共同组成一个系统,如图1 所示。

图1 系统整体结构图
1.2 核心模块选型
本文曾考虑过用单片机作为控制中心,但是单片机的主控板受制造工艺、布局结构等因素的影响,抗干扰能力差,故障率高,不适应田间恶劣环境和播种合格率高的要求。此外,单片机一般应用于单站场所,独立性较强,而PLC 的应用场合一般是工控场所,需要联机运行的地方多,比较适合复杂的控制系统。综合以上考虑,本文选用西门子公司的S7-200 SMART 型可编程控制器作为排种器株距电控系统的控制核心,实物如图2 所示。

图2 可编程控制器实物图
2 排种试验准备
2.1 实验台介绍
室内台架试验是2020 年10 月在山东省科学院计算中心的JPS-12 实验台上进行的,该台架专门用于排种器的性能检测,能提供精确的种子粒距、合格指数、漏播指数等指标,可存储播种录像用于反复观察分析。台架整体结构简约精巧,主要由气吸式大白菜排种器、种床、操作控制台、喷油器、钢制台架、驱动电机、风力传动系统等组成,实物如图3 所示。

图3 JPS-12 实验台
在田间测试播种机的排种性能时,播种机是随拖拉机的前进而运动的,实验台正相反,它是用种床带作为种床,模拟播种机的田间工作速度而运动,排种器在试验时固定不动,种床以排种器为参照物相对移动。这样就把播种机相对地面的运动转化成地面相对于播种机的移动,实质上就是一个参考坐标系转换问题,其效果是一样的。
2.2 试验材料
本次台架试验的对象为“青杂三号”大白菜种子,由青岛国际苗种有限公司提供,实物如图4 所示。因为种子本身的颜色不深,导致排种器落在种床带上的种子不易观察,故特将种子染成了紫色。

图4 “青杂三号”大白菜种子
2.3 性能评价指标
排种性能评价指标可以直观地反映排种器的排种质量,包括排量稳定性、漏播率、各行排量一致性、株距合格率、种子破碎率等。本课题主要对株距合格率、漏播率和重播率进行试验。图5 分别为试验中正常排种、重播、漏播现象和种子在种床带分布的画面。

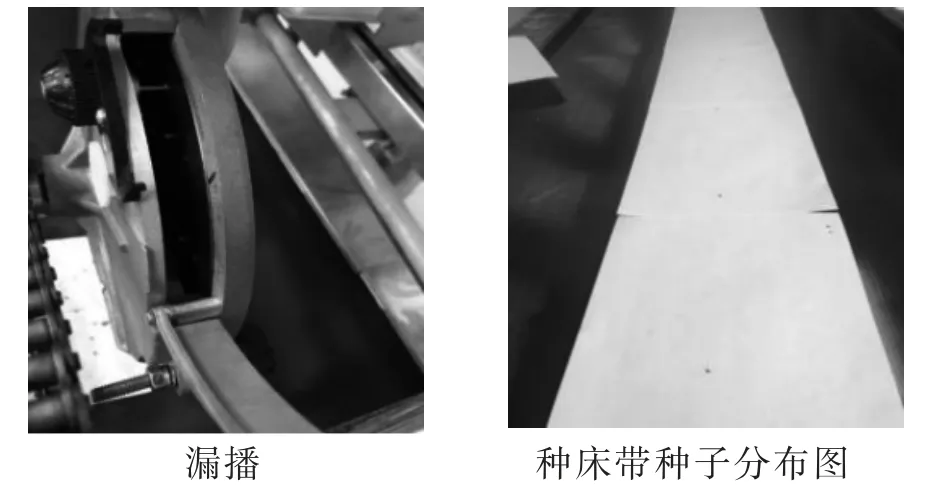
图5 排种性能指标图
图6 为排种盘不同转速下排种器的各项性能数据,可以看出:10~30 r/min 的加速阶段合格指数不断增加直至90.42%,再增加转速合格率逐渐下降;而漏播和重播指数却和合格指数呈相反的走势,在30~40 r/min 阶段漏播、重播指数逐渐上升。经过比对可以推出:当转速超过某个临界值后,由于排种盘离心力增加,部分种子不能正常被吸,造成了漏播指数的上升和合格指数的降低。
3 试验与分析
为了检测气吸式排种器株距电控系统的工作性能是否能满足播种的要求,在实验室台架进行了排种试验,主要探究在播种机转速确定的情况下排种的株距能否达到要求,得到不同参数下排种器的合格指数、重播指数和漏播指数。
3.1 单因素排种试验
在影响气吸式排种器工作性能的众多因素中,真空度和排种盘转速是主要影响因子,对播种机的效率影响颇为重要。本文也就这两个因素进行研究分析,固定排种器相关参数:株距设置为400 mm,吸种孔直径为4.8 mm,排种盘吸种总数为24。
3.1.1 不同转速试验结果分析 为了研究排种盘转速对排种性能的影响,排种盘转速从10~40 r/min,每隔5 r/min 分为7 个水平,真空度保持为3 kPa 不变。在种床带运行平稳之后,每个参数试验记录种床带连续分布的200 粒种子,重复3 次取平均值作为最终结果,试验结果如图6 所示。

图6 排种盘不同转速试验结果
3.1.2 不同真空度试验结果分析 真空度是排种器产生负压的根本原因,因此对真空度的研究是十分重要的。在其他工作参数相同的情况下,真空度1.5~5 kPa 每隔0.5 kPa 分为8 个水平,转速保持为30 r/min,在种床带运行平稳之后,每个参数试验记录种床带连续分布的200 粒种子,重复3 次取平均值作为最终结果,试验结果如图7 所示。因为一开始气吸室内的真空度较小,种子难以被吸附在排种盘上,排种器产生了大量漏播,导致漏播指数很高,随着负压不断地增加,排种盘的吸附力变大,吸种孔有时会吸附多粒种子,这就造成了一个种穴播种过多的现象,导致重播指数变大而合格指数减小。

图7 不同真空度实验结果
3.2 多因素正交试验
在上述转速试验中,发现转速在20~30 r/min 时,播种性能比较好;在上述真空度试验中,真空度在2~3.5 kPa 时,播种性能比较好。为了研究转速和真空度对排种性能影响的主次顺序以及最优参数组合,对每个参数取3 个试验水平,考虑到转速与真空度之间存在相互作用关系,采用正交表进行实验台试验,正交试验水平如表1 所示。每个参数组合试验统计种床带连续分布的200 粒种子,重复3 次取平均值作为最终结果,正交试验结果及极差分析如表2、表3 所示。
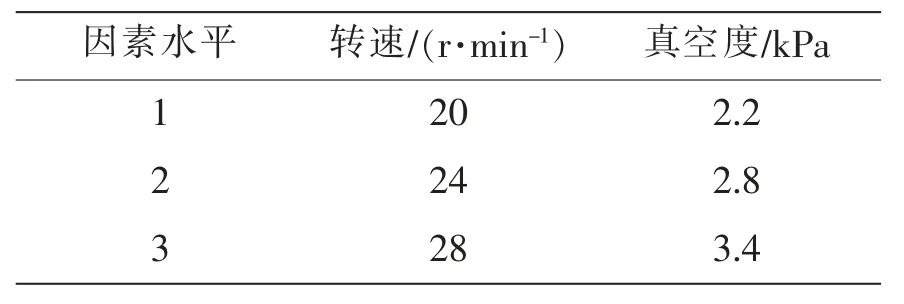
表1 正交试验因素水平
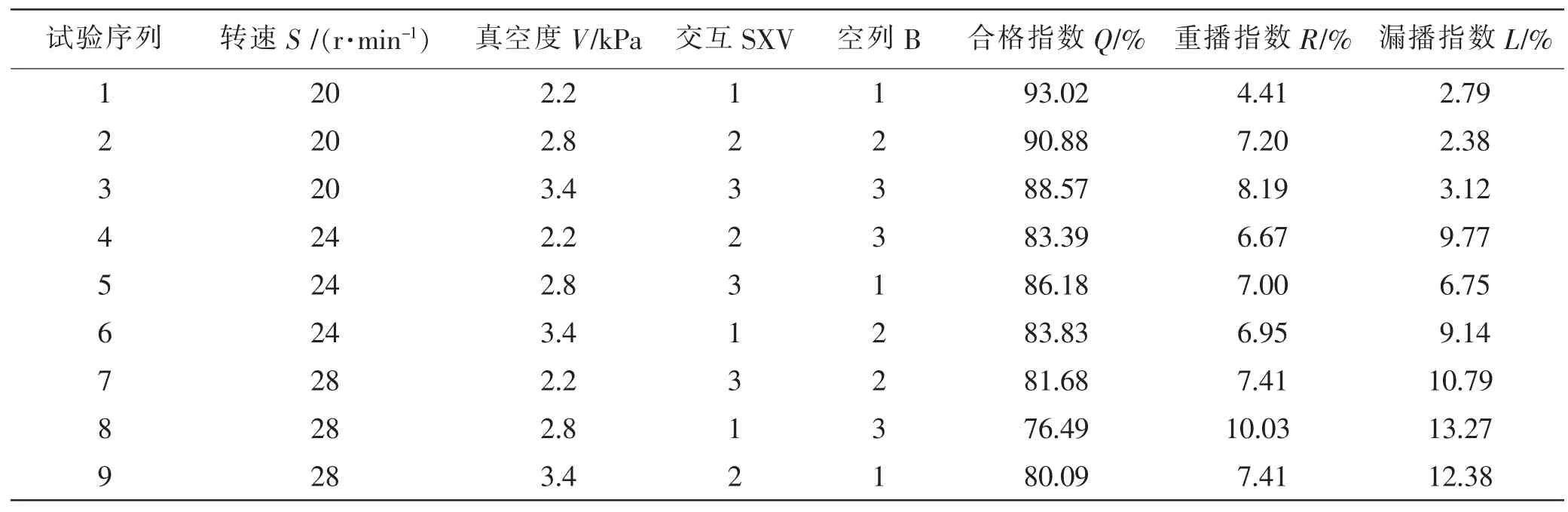
表2 正交试验结果

表3 试验结果极差分析
由图7 可知:当真空度在1.5~3 kPa 不断增加的过程中,合格指数逐渐增大,在3 kPa 时达到峰值89.42%,重播指数和漏播指数则逐渐减小;在3~5 kPa时合格指数反而呈下降趋势,重播指数快速增长,漏播指数则保持稳定。通过分析三者变化趋势,可以推断原
极差的大小代表着因素对试验指标影响的大小,极差越大,影响越显著。根据表2 及表3 的正交试验结果与极差分析可知:对于合格指数和漏播指数,转速的影响较显著;对于重播指数,真空度影响较显著;当转速为20 r/min、真空度为2.2 kPa 时,排种性能达到最佳,合格指数为93.02%,重播指数则为4.41%,漏播指数仅为2.79%,各项性能均符合国家农作物单粒精量播种质量指标要求。
4 结语
本文以步进电机代替地轮为中心,提高株距稳定性为目标,设计了一种基于PLC 的以播种机为载体的气吸式排种器株距电控系统,制定了电驱动系统的总体设计方案。根据台架多因素试验可以得出:排种盘转速和真空度对排种器的排种性能影响较大,当转速为20 r/min、真空度为2.2 kPa 时,排种器的性能最佳,台架试验的合格指数为93.02%,重播指数为4.41%,漏播指数为2.79%。
本文通过株距电控系统的设计与研究对播种机的外形设计和驱动方式进行了革新,也为农业自动化提供了一些思路,通过实现株距的一致性提高播种育种质量,对农业生产具有重要意义。
在实际研究过程中,由于时间和场地条件的限制,没有将台架上的试验结果和实际应用场景进行比对,需要在接下来的工作中做进一步的完善。
猜你喜欢
农业科技与装备(2024年3期)2024-01-01 00:00:00
新疆农机化(2022年1期)2022-03-02 09:44:18
河北农机(2021年9期)2021-12-07 17:00:34
科学与财富(2019年20期)2019-10-21 05:32:35
安徽农业科学(2019年15期)2019-09-24 03:15:06
现代农业科技(2019年7期)2019-09-06 11:48:49
农业与技术(2019年9期)2019-05-28 09:23:40
时代农机(2019年5期)2019-02-11 10:52:34
农机使用与维修(2019年1期)2019-01-30 06:45:32
农业工程学报(2018年24期)2019-01-14 10:42:32
