
基于旋翼无人机技术的近地磁测系统
2021-11-09 08:20:28张绍华徐超群孟立飞张艺腾杜爱民
航天器环境工程 2021年5期
张绍华,徐超群,易 忠*,孟立飞,张艺腾,杜爱民
(1. 北京卫星环境工程研究所,北京 100094;2. 中国科学院 国家空间科学中心,北京 100190;3. 中国科学院 地质与地球物理研究所,北京 100029)
0 引言
与地面磁探测相比,航空磁测技术因其探测效率高、成本低、维护简单等优势,在矿藏探测、沉船定位、目标侦测及导航定位等领域有广泛的应用前景。传统航空磁测平台大多是固定翼飞机,最大的缺点是需要空旷场地起飞和降落,在地形复杂多变或人流较多的地方受到很大限制,并且采用掠过式探测方式。相比之下,旋翼无人机平台操作方便,成本低,无须特定起飞降落场地,适应复杂地形,具有垂直起降和空中悬停等诸多优势,常被用于军民领域执行诸多任务。
飞行器自身磁干扰与磁探测器性能不足成为制约磁场测量精度的重要因素。目前的航空磁测量探测器都将磁传感器探头布置于飞行器的伸展机构上,通过使用无磁伸杆增加磁传感器探头与机体的距离来减小飞行器平台的本底磁场干扰。任来平等通过感磁矩和固有磁矩对无人机的磁性做了基础研究;常凯等研发了一种基于低温超导的固定翼无人机平台的磁测系统,但整个系统搭建较难实现,且成本较高。有关性价比较高的无人机和磁通门传感器组成的测量系统报道较少。
本文针对50 m 近地动态飞行磁场测量难题,利用旋翼无人机、三轴磁通门传感器、数据采集器和无磁伸杆组建成无人机近地磁场测量系统;通过测量整个系统周围的三维磁场来分析系统本底磁场分布特征;通过优化无磁伸杆的位置和修正三轴磁通门传感器的误差来提高磁场探测精度。为验证旋翼无人机磁测系统的整体性能,进行了野外飞行试验。
1 设备组成
研制的旋翼无人机磁测系统主要包括旋翼无人机搭载平台(大疆M600 Pro)、三轴磁通门传感器子系统和数据采集子系统。
1.1 六旋翼无人机
大疆M600 Pro 是六旋翼无人机,具备多重安全保障及先进的智能飞行功能,快拆式起落架和已预装至中心架的可折叠式机臂便于收纳及运输,并有效缩短了起飞前的准备时间(<5 min)。磁测系统的位置、飞行高度由大疆无人机系统提供(GPS定位精度为0.5~1 m)。表1 列出了大疆M600 Pro六旋翼无人机的主要指标:该无人机自重10 kg,最大有效载荷约5 kg,最大航行速度18 m/s,最大航程15 km,可实现连续15 min 的正常飞行时间和30 min的悬停,满足目前的磁场勘测需求,特别适用于复杂地形下的探测任务。

表1 大疆M600 Pro 六旋翼无人机主要指标Table 1 Main indexes of Dajiang M600 Pro six-rotor UAV
1.2 三轴磁通门传感器
无人机磁测系统的磁场探测设备采用巴灵顿Mag03 三轴磁通门传感器,并配有激励模块、感应模块、补偿模块、温度测试模块、信号处理模块及其他附件。巴灵顿Mag03 三轴磁通门传感器具有体积小、重量轻、功耗低、灵敏度高等优点。其主要技术指标如表2 所示。
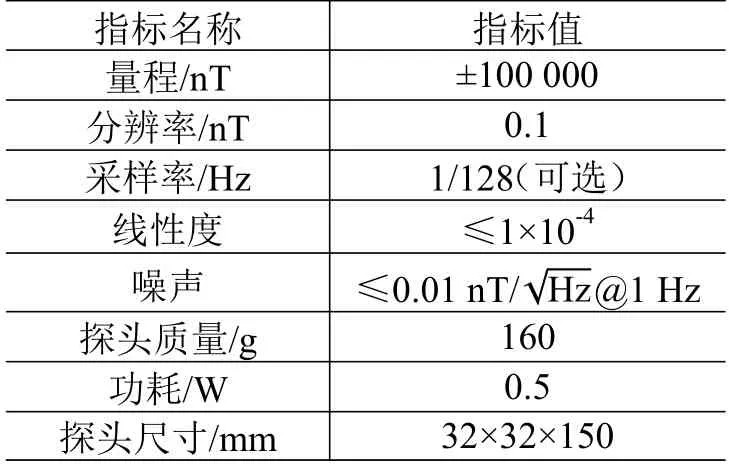
表2 巴灵顿Mag03 三轴磁通门传感器主要技术指标Table 2 Main technical specifications of Barrington Mag03 three-axis fluxgate sensor
1.3 数据采集子系统
与三轴磁通门传感器配套的数据采集子系统安装于无人机主体下挂的搭载平台,可提供高采样率数据信号的采集和存储。考虑到旋翼无人机搭载空间有限和重量限制,对数据采集模块专门做了小体积化与轻量化处理。此外,由于商用无人机的飞控系统相对封闭,为实现飞行过程中磁场数据的实时传输,专门配备了外置的供电模块与无线数据传输设备。
1.4 无磁伸杆
三轴磁通门探头通过外置长无磁伸杆置于旋翼无人机机体下方,可降低无人机本底的磁场干扰,实现高精度磁场探测。无磁伸杆采用无磁、重量轻、强度高的碳纤维杆,保证无人机移动飞行过程中的稳定性和结构强度。无磁伸杆的前端通过十字插销与数采托盘架相连接,后端与磁通门传感器专用的工装连接。该工装采用铝制材料制成,探头内置其中,各固定用螺丝均采用无磁材料,以提高磁探头周围的磁洁净度。
2 无人机本底磁性测量分析
无人机的6 个旋翼发动机、2 个起落架电动控制装置、近200 颗大小不一的铁质螺钉等都有较大的磁性,对无人机周围的磁场分布有很大影响,成为制约磁场探测精度的主要因素,因此有必要对旋翼无人机本底磁性进行测量与分析,优化无磁伸杆安装方案。测试地点选在北京卫星环境工程研究所的CM2 零磁实验室。该实验室可提供单边长16 m方形线圈,线圈内具有直径3 m 球域的均匀磁场区,可以进行卫星、部组件的磁试验。为了提高测试精度,无人机磁测试时间选在凌晨1∶30 之后,环境的磁场波动通常在0.5 nT 范围内。图1 所示为无人机在CM2 零磁实验室的磁场测试现场。

图1 无人机在CM2 零磁实验室中进行磁场测试Fig. 1 Magnetic field test of UAV in CM2 zero magnetic laboratory
无人机本底磁场旋转测试方法如下:
1)将无人机置于无磁转台中心位置,无人机边上的测试支架上并排布置3 个磁通门传感器(A、A、A);
2)调节测试支架的高度,使得磁通门传感器与无人机六旋翼永磁电机在同一个高度,记录传感器至无人机中心的距离d
;3)在距离无人机平台足够远处放置参考磁传感器A,使其与A、A、A保持在一条直线上,用于监控环境磁场波动;
4)做好无人机位置及坐标指向标记,然后启动无磁转台,每隔10°测量一次磁场,直至旋转360°为止;
5)把无人机移动到足够远处,测量背景磁场。
图2 给出无人机周围不同轴距d
的磁场测试结果。可以看出:当d
=0.8 m 时,无人机周围的磁场强度呈显著多峰分布,每个峰都基本对应一个旋翼发动机;随着探头距离增加,多峰分布逐渐消失,以双峰分布代替,表明无人机的本底磁场干扰由多偶极子演变成了单偶极子;当d
=1.5 m 周线上,最大磁场扰动8 nT,最小扰动2 nT;且根据磁场总量分布曲线,当d
>1.5 m,磁场极小值主要集中在90°~120°和240°~270°附近的区域。因此,如果横向安装伸杆,同样的长度,把磁通门传感器安装在这两个区域,则本底磁场扰动最小。为了减少无人机本底磁场干扰,需要尽可能增加无磁伸杆的长度,但长度增加带来的载荷不稳定性力矩会对无人机飞控系统造成不利影响。出于飞行的安全性和实用性考虑,本文将伸杆垂向安装于机体正下方,并测量了不同距离(即伸杆长度)d
处的磁场扰动,结果如图3 所示。可知,当d
=1.2 m 时,磁场最小扰动控制在5 nT,符合本系统的工程应用要求。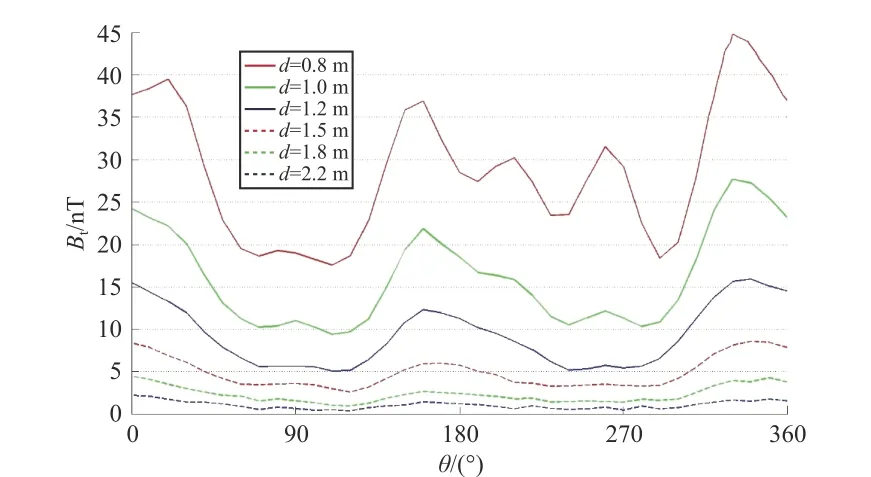
图2 无人机周围不同轴距的磁场总量分布Fig. 2 Distribution of circumferential magnetic field around UAV with different wheelbases
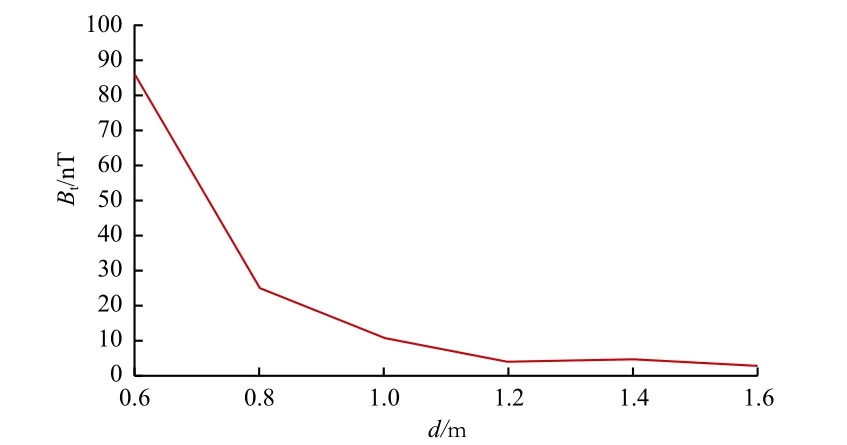
图3 无人机正下方不同距离的磁场最小扰动分布Fig. 3 Distributions of total magnetic field underneath the UAV at different distances to the vehicle center
3 正交性、零偏及刻度误差校正
磁测系统的坐标系与无人机搭载的三轴磁传感器的坐标系一致。由于三轴磁通门传感器在飞行运动状态下存在三轴非正交性、零偏移、刻度系数等偏差,会造成测量结果偏离实际值,所以在使用三轴磁传感器测量磁场时,首先需要对其进行校正,测量出误差系数并用于磁测数据校准。
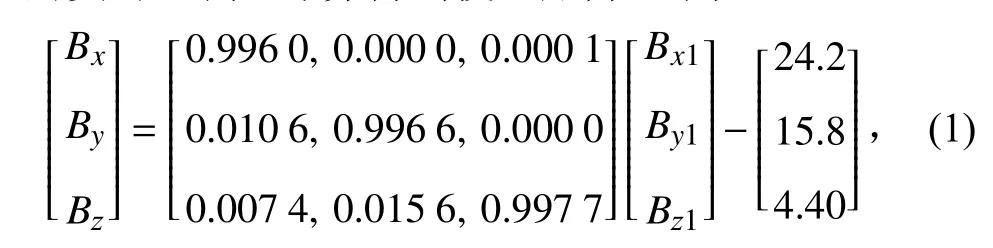
目前一般都采用标量法进行校正,即在已知磁场总量并保持恒定的情况下,旋转磁传感器获得其不同姿态下的测量值,建立误差参数的方程,进行参数求解。旋转的姿态尽可能均匀覆盖整个三维空间,以提高参数的适用性。本文采取综合系数法,将三轴磁强计放置于无磁转台,然后在均匀磁环境中进行标定,同时利用光泵磁强计进行总场的实时监测。计算得到校正矩阵为
B
、B
和B
为误差校准后的磁场;B
、B
和B
为误差校准前的磁场。图4 给出磁场校正前后的对比结果,蓝色曲线每一个台阶对应一个旋转姿态,台阶之间的波动为试验人员在调整磁强计探头姿态过程中。该方法能将磁强计的最大总场偏差从500 nT 降低到3.0 nT,均方根误差(RMSE)为0.61 nT,有效提高了三轴磁通门传感器的测量精度。
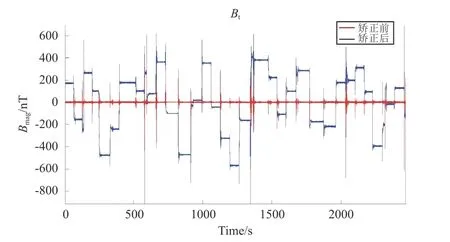
图4 矢量磁通门传感器校正结果对比Fig. 4 Comparison of calibration results for vector fluxgate magnetic sensor
4 飞行试验与结果分析
为验证无人机磁探测系统的整体性能,2019 年7 月使用该磁测系统在野外进行了磁场考察飞行试验。得益于整个系统的轻量化、模块化设计,系统装配简易,无人机可在10 min 内完成有效载荷的装配并垂直起飞,升至15 m 高度,然后在80 m 的半径稳定飞行了3 圈,每圈飞行时间为260 s,磁场采样频率10 Hz,系统集成的GPS 实时记录了无人机飞行的位置信息,三轴磁通门传感器子系统自动测量并记录飞行路径上空的磁场。图5 所示为整个飞行过程中磁场观测值(蓝色实线)及修正值(红色虚线)随时间的变化。可见:磁场观测值在误差修正前除了有伴随无人机转圈飞行明显起伏的转向差,还有高频的波动噪声,推测与无人机飞行过程中的剧烈抖动相关;经过滤波处理,转向差与高频噪声都得到有效抑制,每一圈勘测飞行路径上的3 个磁异常清晰可见,而且不同航次之间的一致性很好。
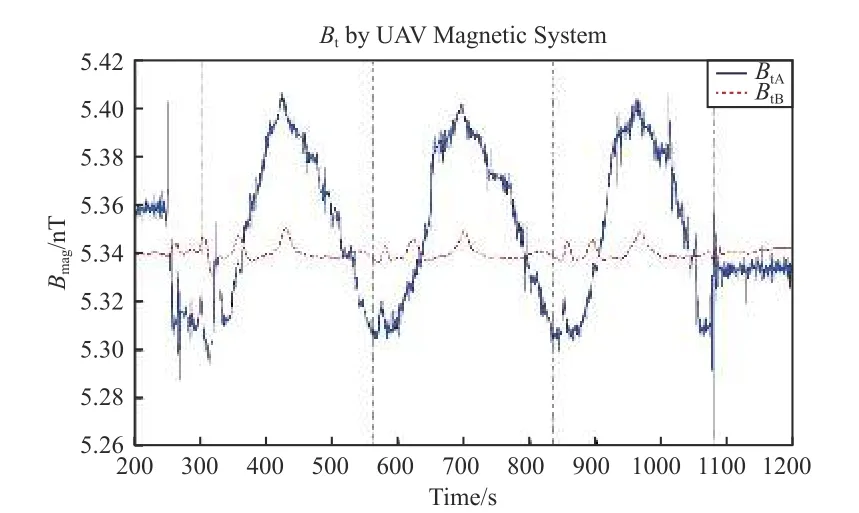
图5 误差修正前后旋翼无人机磁测结果Fig. 5 Magnetic measurement results of rotor UAV before and after error correction
图6(a)、(b)分别为误差修正前后旋翼无人机磁测结果的二维平面投影,为了更清楚显示磁异常,此处磁场测量值减去了背景磁场的均值。由图6(a)可见,校正前磁场分布是左右对称的,分别约为-500 nT 和+500 nT。这显然不是真实物理量,应是三轴磁通门传感器在无人机飞行过程中的姿态变化导致的转向误差,其量级与标定计算值相符合。转向误差的存在,掩盖了真实存在的磁异常。这里利用式(1)的误差修正系数对测试结果进行了数据校正,结果如图6(b)所示,可见异常较明显。在坐标(1100 m, 450 m)附近,停放了一辆小轿车,从测量结果可以看出,小轿车产生的磁异常在这3 次掠过飞行中都被探测到,磁异常值在100 nT 左右,估算出小轿车的磁矩在3000 A·m,与实际量级相符。
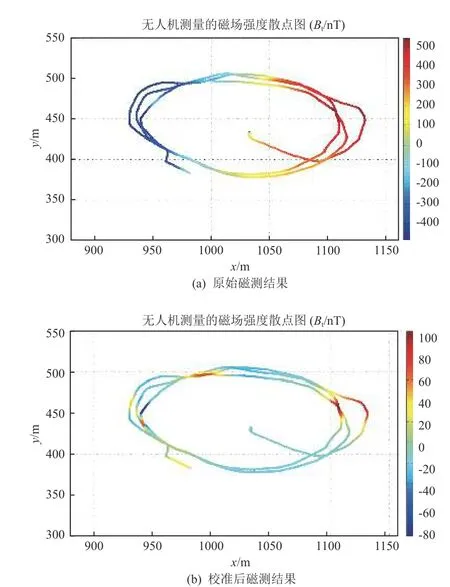
图6 误差修正前后旋翼无人机磁测结果二维平面投影Fig. 6 Two dimensional projection of rotor UAV magnetic survey results before and after error correction
5 结束语
本研究以商用大疆六旋翼无人机为平台,集成三轴磁通门传感器子系统、数据采集子系统和无磁伸杆构建了旋翼无人机磁测系统;详细测量了无人机本底磁场分布,分析了无人机干扰磁场的空间分布特征,优选出最佳的磁通门传感器布设位置及方案,采用无磁伸杆有效降低了无人机的本底磁场干扰。利用综合系数矫正法对三轴磁通门传感器在飞行运动状态下存在的非正交性(转向)误差、零偏移及刻度误差进行修正,极大提高了无人机磁测系统的探测精度:量程±100 000 nT,均方根误差<1 nT。野外飞行试验表明,本文的无人机磁测系统能够快速、清晰地识别飞行路径上的磁异常;动态飞行一致性也得到证实,同时验证了旋翼无人机磁测系统应用于飞行勘察的可行性。
目前存在的问题是磁测系统采样频率与无人机自带的位置姿态数据采集频率不一致,难以保证数据同步性,后期需要进行插值处理才能得到对应位置点的磁场数据;此外,还需进一步集成磁探测系统专用的、更高精度的位置姿态测量子系统,以解决数据接口不一致、通信效率低和不同步问题,提高无人机磁测量系统的整体探测性能;另外,在无人机飞行磁探测数据的实时可视化与数据反演解释等方面也有待突破。
(编辑:许京媛)
猜你喜欢
大电机技术(2022年2期)2022-06-05 07:28:34
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
电子制作(2019年9期)2019-05-30 09:41:48
传感器与微系统(2018年7期)2018-08-29 00:44:20
电测与仪表(2017年24期)2017-12-19 05:15:18
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
水利科技与经济(2016年8期)2016-04-22 03:41:48
设备管理与维修(2016年5期)2016-03-16 02:20:44
电测与仪表(2015年8期)2015-04-09 11:50:12
