
基于车致振动响应的桥梁损伤识别方法研究
2021-11-08 09:42:44何兴文赵忠强
天津建设科技 2021年5期
何兴文,赵忠强
(大连理工大学土木工程学院,辽宁 大连 116024)
随着桥梁等城市基础设施的老化,结构安全评估与维修加固的需求日益增加,国内外学者在桥梁结构损伤识别领域开展了大量研究,包括基于静力测试、动力模型参数、智能计算等众多桥梁结构健康状态评估的方法[1]。对于中小型桥梁,如果能够确保精度,运用桥梁车致振动响应进行结构的损伤识别是一种高效且实用的方法[2],其能够在不中断交通的条件下快速、准确地获得桥梁结构的损伤情况,具有广阔的应用前景。
近年来,基于车-桥耦合振动理论引入优化方法来进行桥梁结构的损伤识别,作为一个新的研究方向受到学者们的青睐。HE Xingwen等[3]提出了利用车-桥耦合振动理论及遗传算法进行桥梁结构损伤识别的构想。毛云霄等[4]基于车-桥耦合系统的动力响应研究了遗传算法在桥梁结构发生单目标损伤和多目标损伤情况下的识别成功率及识别效率。本文基于文献[3]提出的方法,利用自研发程序进行平面简支桥梁结构的损伤识别,整体思路为:依据工程经验判断结构可能的损伤模式,通过自编的高精度车-桥耦合模拟计算程序计算该损伤模式下结构的车致动力响应,当某一模式下的响应与实测的响应数据一致时,即可确定其即为实际的损伤工况。由于可能的损伤模式数量巨大,为了提高计算效率,本方法引入了遗传算法优化求解过程,以便适应实际工程应用的要求。
1 车-桥耦合振动响应模拟分析
1.1 车辆模型
车辆是一个非常复杂的振动系统,在实际工程中应当依据所研究的具体问题进行科学合理的简化建模。当着眼于车-桥耦合系统竖向振动问题时,空间车辆模型需要考虑轮对的竖向运动、车体的沉浮、点头与侧滚运动等;平面半车模型则仅需考虑车体的沉浮及点头运动[5]。
本文旨在利用简单模型对构想方法进行初期可行性确认,因此采用能够反应竖向振动主要成分的平面简化模型,将车辆模拟为二自由度(沉浮自由度zj与点头自由度θj)平面模型,车体与下部结构之间的悬挂系统按照线性弹簧、阻尼分析。见表1。
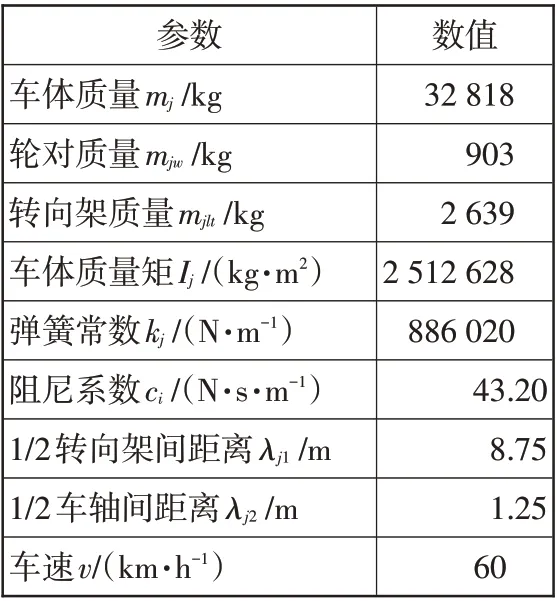
表1 二自由度平面列车模型参数
算例采用一段铁路桥梁实测数据,假设轮对与轨道密贴接触,计算程序能够考虑行驶过程的“跳车”现象。
车体的沉浮运动方程

车体的点头运动方程

其中

式中:j——列车的车厢号;
l=1、l=2——该车的前后转向架;
k=1、k=2——转向架的前后车轴;
vjl(t)——由弹簧伸缩和阻尼引起的作用力;
wjlk——轮对的竖向位移,由桥梁结构变形产生的挠度w(t,xjlk)及路面不平顺z0(xjlk)组成。

车辆轮载

以矩阵形式表示车辆的运动微分方程

式中:M v,C v,K v,F v——车辆模型的质量、阻尼、刚度矩阵及外力向量;
w v——车辆模型全部自由度构成的位移向量。
1.2 桥梁模型
采用有限元建立平面简支梁桥的有限元模型。桥梁计算跨度L=50 m,等间距划分为20个单元,材料的弹性模量E=2.06×1011N/m2,剪切模量G=7.9×1010N/m2,抗弯惯性矩I=0.226 393 m4,单位长度质量m=1 500 kg/m。见图1。
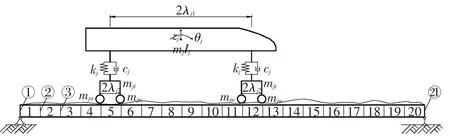
图1 车-桥耦合振动模型
同车辆运动方程的推导类似,桥梁的运动方程

式中:M b,C b,K b,F b——桥梁模型的质量、阻尼、刚度矩阵及外力向量,本文采用Ray⁃leigh阻尼获取阻尼矩阵;
w b——桥梁模型节点位移向量,可用特征向量φi及节点广义坐标qi表示。

通过轮对与桥梁接触点的耦合作用力与耦合位移建立车辆与桥梁模型振动的关系,联立得到车-桥系统的运动方程,以矩阵形式表示

式中:̈——全系统的等效质量矩阵;
̇——等效阻尼矩阵;
K w——等效刚度矩阵;
F——外力向量。
2 损伤识别中遗传算法的引入
遗传算法是模拟生物在自然环境中的遗传和进化过程而形成的一种自适应性全局优化概率搜索算法[6]。本文所采用的目标函数OBJ定义如下

式中:f(i)——遗传算法搜索到的各损伤工况下某节点的计算响应数据;
f*(i)——模拟实测响应数据;
t——所利用计算响应的时间总步数。
OBJ越小,表明该损伤模式与实际损伤越接近,适应度越好。当OBJ满足收敛条件时,可认为该工况为真实损伤模式,即成功地对损伤进行了识别。
将目标函数收敛值设定为10-8m2/s4,算法的最大遗传代数设置为1 000代,当满足收敛条件或运行至最大遗传代数时停止运算,输出当前识别结果。
假定结构的损伤仅考虑单元抗弯刚度的降低,降低程度从0到70%,以步长10%变化。对单元的损伤位置以及损伤程度进行编码,编码方式为二进制;两点交叉,交叉率0.6;基本位变异,变异率为0.05;种群大小视研究工况而定。
利用该算法进行损伤识别的具体流程:
1)事先假定桥梁的损伤模式,利用自研发程序计算出其加速度响应,作为模拟实测响应数据输入算法;
2)根据工程经验推断可能的损伤部位及程度,生成初始种群,种群中的每个个体均代表一种损伤模式;
3)调用车-桥耦合计算程序,对当前种群中的全部个体计算动力响应f(i),计算目标函数,如收敛则停止运算,输出识别结果,否则继续向下搜索;
4)对上一代个体按照适应度进行选择、交叉、变异生成第n代种群,重复步骤3,若没有收敛则执行至最大遗传代数,即n=1 000时停止运算并输出种群中适应度最好的个体。
3 损伤识别算例
遗传算法的计算过程具有不确定性和不可重复性,研究表明,可以通过多次重复计算并取平均值的方法提高结果的可信度与精度[7]。HE Xingwen等[3]以简支梁桥为例进行计算,验证了利用该方法对简单条件下平面简支桥梁结构初步进行损伤识别的可行性。在此基础上,本文对预设的每种损伤工况均进行100次独立重复计算,得到100个识别结果,对每次识别成功时的遗传代数由小到大排序,取平均值得到ANI(平均遗传代数),对该工况下识别成功的次数进行统计得到SR(识别成功率)。
3.1 种群大小的影响
在遗传算法中,种群过小会引起生物多样性降低,有可能陷入局部最优解而出现早熟现象,导致识别效率降低;种群过大时可以提高识别的成功率,但会导致算法在每一代的运行速度变慢。
工况1~4探究了种群大小对识别效率的影响。模拟实测损伤模式为单元10发生40%的损伤;搜索范围为单元8~12,损伤程度未知,共计85种可能损伤模式。4种工况下的识别成功率均为100%,随着种群由25到100逐渐增大,每一代的运行速度为识别成功所需的平均遗传代数ANI降低,综合考虑运行速度与ANI,将种群大小设为50能够获得更高的识别效率,下文讨论的工况中均按此设定。见表2。
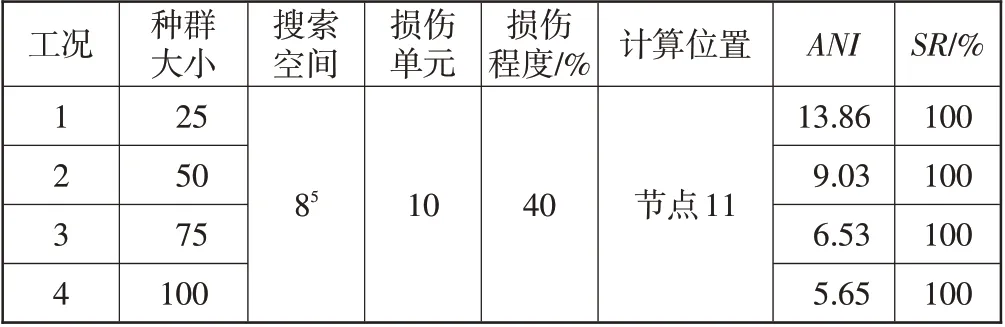
表2 种群大小对损伤识别的影响
3.2 搜索空间大小的影响
在实际工程中对桥梁进行损伤识别时,非常有必要依据工程经验对结构可能发生损伤的模式做出初步判断,以缩小搜索的范围。
工况5~7探究了搜索空间大小对识别效率的影响。模拟实测损伤模式为单元10发生了40%的损伤。工况5搜索范围为单元10~11,工况6与工况2为同一损伤模式,搜索范围为单元8~12,工况7搜索范围为单元6~15,损伤程度均未知。3种工况所对应的搜索空间分别为82、85和810。搜索空间大小随着可能损伤单元范围的扩大呈指数型增长,但平均遗传代数ANI的增长速度却显著低于搜索空间增长的速度。搜索空间越大,利用本算法进行损伤识别的效率越高,证明了其在桥梁结构损伤识别方面的可行性与巨大的应用潜力。见表3。

表3 搜索空间大小对损伤识别的影响
3.3 单元损伤程度的影响
工况8~15探究了单元损伤程度对识别效率的影响。模拟实测损伤模式考虑单元10分别发生0、10%、20%、……70%共8种不同程度的损伤,种群大小为50、计算位置选择节点11,搜索范围为单元8~12,损伤程度未知,共85种损伤模式。实际工程中不会允许结构发生工况13~15所设定的50%~70%严重破坏,仅本着理论研究的目的加以分析,对实际情况暂不予考虑。当损伤程度由0到30%逐渐增加时,ANI由3.65渐增至12.97,当损伤程度增至40%时,识别效率会出现明显提高,与损伤20%时的结果近乎一致,继续增加至50%时,识别效率出现短暂降低,而当损伤程度继续增加至70%时,识别效率逐渐提高,ANI由12.68缓慢减至11.46。见表4和图2。
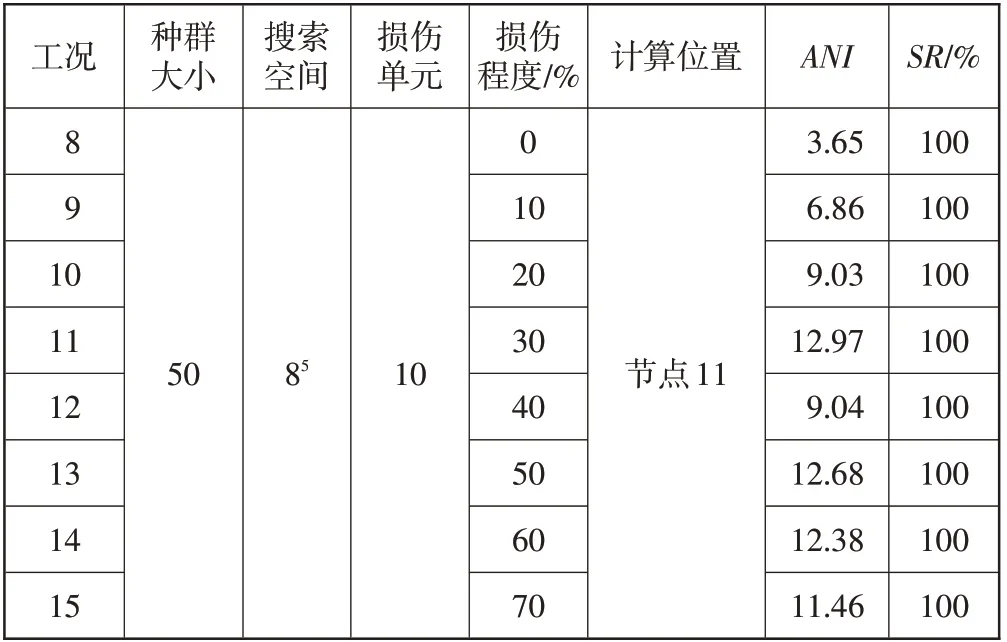
表4 单元损伤程度对损伤识别的影响

图2 损伤程度对损伤识别的影响
3.4 动力响应计算位置的影响
在对结构进行损伤检测时,传感器布置在不同的位置其记录的动力响应亦不相同,而损伤部位往往是未知的,工况16~18探究了计算位置对损伤识别的影响。模拟实测损伤模式为单元10发生40%的损伤。3种工况分别为计算节点1(支点位置)、节点6(1/4跨位置)和节点11(跨中位置),搜索空间大小均为85,其余参数均相同。对同一损伤模式,计算位置选取的不同会严重影响算法的识别效率。对于所设定的损伤工况,将计算位置选在1/4跨中位置平均仅需9.03代便可识别成功,显著少于计算位置为支点处的42.98代。见表5。

表5 计算位置对损伤识别的影响
4 结论
1)计算位置的选取对算法识别效率的影响十分显著,对于同一损伤模式,计算位置选取的不合适,会使得识别效率大大降低。
2)该算法的识别效率会随着损伤程度的增加呈“降低-提高-降低-缓慢提高”趋势。
3)平均遗传代数ANI随着种群大小的增加逐渐降低,每一代运行时间随之延长,综合考虑二者的影响,本算例中选取种群大小为50能够保证最快的识别速度。
4)当其余条件一致时,随着搜索空间的增大,本算法的识别效率将会得到显著提升。
5)本文所设定的全部工况中,无论所需要的平均遗传代数ANI之间差异如何,算法均能以100%的成功率实现桥梁结构的损伤识别。□■
猜你喜欢
今日农业(2022年15期)2022-09-20 06:54:16
数学物理学报(2022年2期)2022-04-26 14:08:28
红土地(2018年7期)2018-09-26 03:07:38
石油地球物理勘探(2017年2期)2017-11-23 06:02:04
中央民族大学学报(自然科学版)(2017年1期)2017-06-11 07:13:32
统计与决策(2017年2期)2017-03-20 15:25:24
智能系统学报(2015年4期)2015-12-27 09:38:39
大型铸锻件(2015年5期)2015-12-16 11:43:20
湖南理工学院学报(自然科学版)(2014年1期)2014-02-28 22:12:27
济宁学院学报(2014年6期)2014-02-28 01:14:10
