
家用小型智能垃圾分类装置的设计与实现
2021-11-05 08:03陈长征刘立昕
电子技术与软件工程 2021年17期
陈长征 刘立昕
(1.西安航空学院 陕西省西安市 710077 2.中航光电科技股份有限公司 河南省洛阳市 471000)
1 前言
1.1 研究背景
垃圾分类(英文名为:Garbage classification),一般是指按一定规定或标准将垃圾分类储存、分类投放和分类搬运,从而转变成公共资源的一系列活动的总称。分类的目的是提高垃圾的资源价值和经济价值,力争物尽其用。进行垃圾分类收集可以减少垃圾处理量和处理设备,降低处理成本,减少土地资源的消耗,具有社会、经济、生态等几方面的效益。2017年3月,经国务院批准,国家发展改革委、住房和城乡建设部联合下发了《生活垃圾分类制度实施方案》,各省也陆续出台了实施细则,逐步推进居民生活垃圾分类工作。但是,一些城市在执行垃圾分类规定时,居民普遍反映存在分类困难、界定不清等问题,导致工作难以开展。
本文围绕该问题进行深入研究,设计了一种基于语音识别技术的智能垃圾分类装置,通过语音识别技术和计算机控制技术将户声音信号转换为电信号,再通过可编程控制器控制执行机构完成预设动作,从而实现不同垃圾仓位位置的自动同步。这样,用户只需说出要投放的垃圾名称,语音模块将自动识别确认其属于何种垃圾,并辅助用户轻松实现垃圾分类。
1.2 国内外现状
国外某些发达国家进行垃圾分类已有数十年了,比如日本、德国和瑞典等,目前他们在垃圾分类方面已处于比较成熟的阶段,例如美国BigBelly Solar 公司发明的智能垃圾桶,这种智能垃圾桶主要针对的是户外社区垃圾集中点的垃圾打包处理。此垃圾桶拥有太阳光伏板、网络通信模块、高强度垃圾压缩装置。通过顶部的太阳能光伏板为整个垃圾装置提供电源,当装置内的垃圾达到设定的溢出位后,压缩装置会在极其短的时间内将垃圾的体积压缩至原来的20%,等到垃圾箱快满时又会启动网络通信模块发送垃圾需要处理及该垃圾装置所在的精确地理位置等信息至垃圾处理中心。然后处理中心的系统会根据各个垃圾装置发回的数据进行分析,然后规划处理,为垃圾回收车确定最佳的回收路线和时间,再将垃圾清理走。
而国内智能垃圾桶能达到的最高状态就是将电控和普通的垃圾装置结合,其中90%的地方都采用的普通的垃圾分类装置,并在家用垃圾装置领域没有实现垃圾分类功能。目前国内垃圾装置大致分为四种:
(1)按钮电控式垃圾桶:此种垃圾桶就是利用简单的电气控制原理,通过人为按下垃圾桶桶盖的开启按钮,垃圾桶通过机械控制结构和电机或者电磁阀来打开桶盖。这种垃圾桶实现了不让人触碰垃圾桶桶盖就可以打开垃圾桶,减轻了人力,而且防止了因为手部接触而造成的疾病细菌感染问题。
(2)红外传感翻盖式垃圾桶:此种垃圾桶与按钮电控式垃圾桶的控制原理相同,它就是用红外传感器代替普通的按钮。在功能和用户体验上有了很大的革新,让人们隔空就可以控制垃圾桶盖的打开。
(3)普通带盖垃圾桶:这种垃圾桶也是我们日常家庭生活中最容易见到的,它没有任何的电气及电路控制部分。它的优点就是便宜耐用、可以隔绝垃圾桶内垃圾散发出气味,缺点就是需要浪费人力来打开垃圾桶桶盖。
(4)脚踏式垃圾桶:此种垃圾桶与普通带盖垃圾桶的工作原理基本相同。脚踏式垃圾桶就是通过机械结构设计将开盖装置设置在垃圾桶的下部,用户只需用脚踩下脚踏装置垃圾桶的桶盖机会打开。
2 系统功能结构及主要硬件参数
装置主要分为执行机构和电控机构两个部分,其中执行机构由四个垃圾仓位和垃圾桶主体构四个垃圾仓位分别是有害垃圾、厨余垃圾、可回收垃圾、其他垃圾。四个仓位采用可分离式设计,相互独立且可以灵活拆卸。
电控机构则主要包括单片机控制器、语音识别芯片、语音播报芯片、外接语音播报音响、位置传感器及舵机等。当垃圾分类装置整个系统开始工作时,用户说出要投放的垃圾名称,语音识别单元采集到声音信号并确认垃圾分类属性,通过发声单元播报给用户相关信息;同时语音识别单元将识别的垃圾分类数据传递给单片机控制器,再单片机控制电机旋转相应的角度;位置传感器则实时检测每个垃圾桶中的垃圾量,当垃圾桶容量超过80%时,将语音提示用户及时倒垃圾。系统主要硬件参数如表1所示。

表1:系统主要硬件参数及功能表
3 系统工作原理
3.1 控制机构
系统上电后首先进行初始化,各模块进入待命状态。此时LD3320 语音模块的外接麦克风收到外界发出的信息,将声音信息转换为二进制数组并通过串口传输给单片机,单片机再将收到的数据与其内部程序定义的分类词条二进制数组进行比较,得出结果后控制舵机和语音播报模块进行相应动作。控制机构执行流程如图2所示。

图2:控制机构执行流程

图1:四种常见的垃圾储存分类装置
3.2 语音识别
语音识别模块LD3320 是在一种离线模式下对声音信号进行识别和分析的集成电路,该模块采用ASR 技术,用户可以自定义设置一级唤醒词条。当用户语言输入为唤醒词时,语音模块等待接收二级命令。若不是一级命令,语音播报模块提示用户语音输入正确的一级命令词条,待一级命令输入正确时进行下一步。二级命令为各种垃圾种类,当接收到语音信号且与系统库中的词条数据相似度较高,则判断词条属于哪种垃圾并通过语音播报模块进行播报反馈给用户。同时,单片机驱动舵机旋转固定的角度,将垃圾分类装置的此种垃圾仓位旋转到预设位置并打开垃圾投掷口,语音播报模块提示用户投掷垃圾,投掷完成后,投掷口的舵机自动复位关闭投掷口。若二级命令不属于系统库的词条,则此词条无法识别。语音播报模块提示用户“此垃圾无法识别”,垃圾分类装置的其他部分不执行任何操作。除此之外,装置内部增加了一个距离传感器,在每次打开投掷口之前,传感器都会对内部仓位的垃圾进行检测,当有效距离低于预设值时即垃圾量超过总仓位最大上限时,语音播报模块自动发出提示。如表2所示。
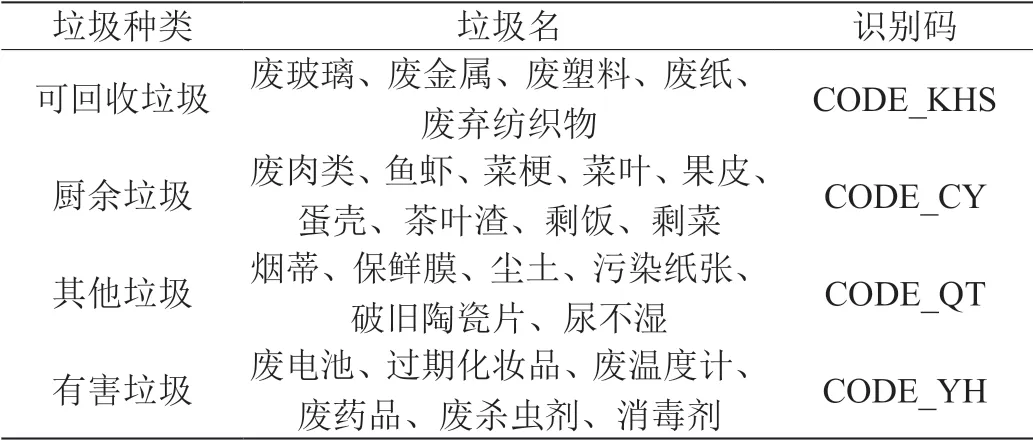
表2:垃圾分类语音识别词库
3.3 执行机构控制
执行机构动作主要是在通过控制PWM 脉冲信号,实现特定调价下舵机旋转一定角度,从而实现垃圾仓位到达指定位置。其中输出转角与输入脉冲的关系是转动方向与单片机产生的PWM 脉冲占空比有关,占空比大舵机的转动角度就越大,舵机的转动角度就越大。为了实现垃圾分类仓位自动旋转和仓盖自动打开的功能,系统主要包括两个舵机,其中舵机1 控制需要实现上电自复位,当成功识别一级指令时不做出任何反应。当成功识别二级指令时,舵机向左旋转90 度打开垃圾分类装置的投掷口仓门,5 秒之后垃圾投掷完垃圾分类装置的投掷口仓门关闭。舵机2 的控制需要实现垃圾四个仓位的精确角度旋转,当成功识别一级命令后,用户说出垃圾种类单片机进行垃圾种类判断并作出语音回复反馈给使用者。这样,垃圾仓位就能根据垃圾的种类旋转到相应的角度。
3.4 仓位溢出提醒
传感器检测模块的主要功能时检验垃圾仓位的垃圾是否到达了垃圾溢出位。一旦垃圾分类装置的仓位发现到达了设定的垃圾溢出位,必须通知用户及时的通知用户清理相应仓位中的垃圾。以免垃圾过多溢出造成其他的仓位污染及损坏设备本身。传感器控制部分主要是传感器作为输入一旦检测到有东西长时间遮挡传感器,则视为垃圾到达了溢出位。这时,单片机将控制语音播报提示垃圾装置垃圾仓位已满,用户需要自行的倾倒桶内的垃圾。
4 实物展示
通过使用Solidworks 和Protues 两款软件分别执行机构部分和电控部分进行建模仿真,在此基础上最终以一款小型笔筒为原型进行改造,完成了垃圾分类装置的制作,装置功能达到预期目标,能够自动识别语音信号并在较短的时间内将分离仓旋转至入口,同时打开盖板。如图3所示。
猜你喜欢
趣味(作文与阅读)(2021年11期)2021-03-09
趣味(语文)(2021年11期)2021-03-09
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
舰船科学技术(2015年8期)2015-02-27
