
复频谱插值DFT 的电力系统低频振荡信号测量方法
2021-11-04 09:40:34黄瑞肖宇刘谋海单铉昇温和
湖南大学学报(自然科学版) 2021年10期
黄瑞,肖宇,刘谋海,单铉昇,温和
(1.湖南大学 电气与信息工程学院,湖南 长沙 410082;2.国网湖南省电力有限公司,湖南 长沙 410004;3.湖南大学智能电气量测与应用技术湖南省重点实验室,湖南长沙 410082)
电网参数的准确估计是电能计量、电能质量检测、继电保护的重要基础.电力系统的干扰,例如故障,大负载的开/关,发电机的断开,线路切换等,会导致发电机之间的转子角发生振荡从而导致电网产生低频振荡.如何在低频振荡情况下实现电网参数准确快速测量,对维持电力系统稳定运行起着至关重要的作用[1].
近年来,很多学者与研究机构对于电网动态参数测量进行了研究.其中常用的测量方法主要有:基于正弦信号模型的检测算法;周期法及其改进算法,主要包括过零检测法、水平交点法、高次修正函数法和最小二乘多项式曲线拟合法等;随机模型算法,主要包括最小二乘法[2]、最小绝对值近似法[3]、牛顿迭代算法和线性滤波算法等[4-5].基于周期信号模型的检测算法应用最为广泛,主要包括离散傅里叶变换(Discrete Fourier transform,DFT)[6-7]和快速傅里叶变换类算法及其改进算法.
理想情况下的电网信号为标准正弦信号,以正弦信号模型为基础的电网频率测量方法得到大量应用,其中应用最为广泛的方法就是基于离散傅里叶变换的参数估计方法.在同步采样情况下,仅用一个周波的采样信息就可实现对参数的准确估计.但是在非同步采样情况下,其精度受到频谱泄漏和栅栏效应的影响,需要采用加窗插值[8-9]等方法进行优化.
当电网信号处于动态变化时,由于DFT 方法的局限性,相关动态参数无法准确估计.低频振荡的场景下,电网中的电压与电流信号不再是稳态信号,其幅值会产生周期性的波动,如不及时监测与控制,将进一步导致系统间产生功率震荡,对传输线路和用电设备造成不良影响,破坏系统的安全稳定性.为了实现对低频振荡信号及时准确的测量,国内外学者对相关算法进行了研究,文献[10]将Prony 方法与数字滤波相结合,相较于传统Prony 方法提高了抗噪性.卡尔曼滤波算法对于动态信号有着较好的跟踪效果,文献[11]提出了基于卡尔曼滤波的测量方法,有较好抗噪性和测量精度.迭代滤波算法[12-13]在频率接近工频的情况下能实现高精度的测量,但是在频偏较大与幅值动态变化的情况下误差较大.小波变换[14-15]虽然适用于动态信号分析,但是计算量大,实时性不足.文献[16]提出了适用于含阻尼振荡信号的插值方法,但该方法仅适用于事后离线分析,不适用于低频振荡在线监测.文献[17]提出了基于同步向量测量数据的振荡参数测量方法,但是每次运算需要累计约2 s 的同步相量数据.文献[18]提出的泰勒傅里叶方法通过泰勒级数展开简化计算,在稳态情况下精度高,谐波抑制能力强,在动态情况下响应速度快.文献[19]通过将Prony 方法与泰勒傅里叶级数结合,提出了泰勒Prony 算法,实现了在低频振荡场景下的参数估计.
以上提到的方法,均为利用单相信号实现参数估计,而在电力系统中通常要将三相作为一个整体进行考量,考虑到三相系统的平衡特性,本文提出了一种基于复频谱插值DFT 的参数估计方法.通过等幅值克拉克变换,将三相系统中的参数估计问题转换为复指数信号的参数估计,本文通过引入指数衰减系数,构建三相信号模型,并基于所构建模型对各项估计参数进行了推导,给出了各项参数的表达式.在稳态信号和动态信号的仿真验证中,通过与其他方法的对比,本文方法的准确性得到验证.
1 信号模型
电力系统故障、线路切换、发电机断开与连接以及断开或接入大量负载会导致电力系统的波动,进而引发电压或电流低频振荡.通常情况下,在低频振荡或对称故障时,电力系统仍然保持对称特性[20].
在文献[21]和[22]中提出,指数衰减的正弦信号可以用来近似拟合低频振荡和对称故障,本文将阻尼系数引入平衡的三相信号模型中,使得信号模型更加符合低频振荡下电网信号的特点.考虑到低频振荡的对称特性,将振荡信号建模为一组对称的指数衰减正弦信号,可以表示为:
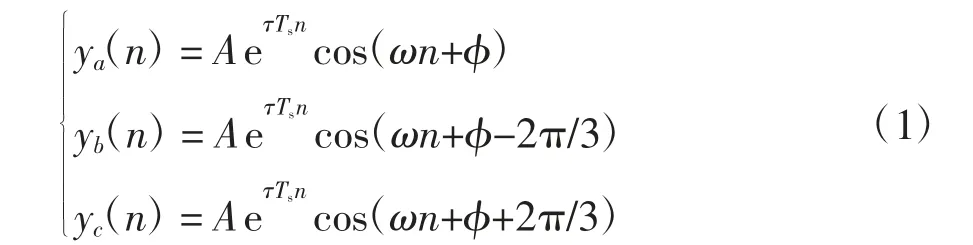
式中:A,τ,φ 和ω 分别代表幅值,衰减系数,相位和角频率.信号的采样率为fs,Ts=1/fs.
2 基于复频谱插值DFT 的参数估计方法
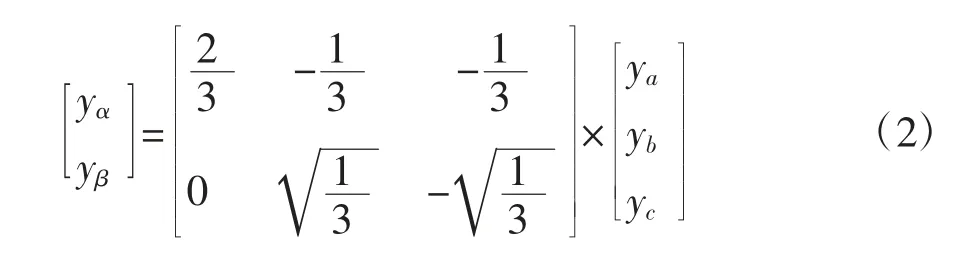
对于三相三线系统,其三相电流及以任意点为电压参考点的三相电压经克拉克变换后得到的α、β两相瞬时电压uα、uβ和瞬时电流iα、iβ可完全表征此三相三线系统.因此,基于前文给出的三相信号模型,做等幅值克拉克变换可得:
在三相系统中,经等幅值克拉克变换得到的yα和yβ可以通过如下方式重构信号,可得到含有正序分量和负序分量的复信号ycomples:

式中,下标+表示正序分量的参数,下标-表示负序分量的参数.当三项系统为对称系统时,负序分量为0,公式(3)可简化为:

由此,可以得到一个新的复信号序列,且根据克拉克变换的性质,复信号序列与三相系统有着相同的频率、幅值和相位.因此,三相系统的参数估计问题转化成了对复信号ycomplex的参数估计.接下来将对A,τ,φ 和ω 的求解进行推导.
使用长度为N 的矩形窗对复信号ycomplex(n)加权,并对序列做N 点离散傅里叶变换可得:
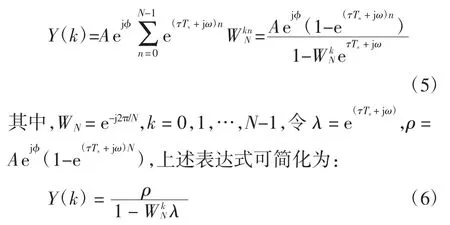
由公式(6)可知,λ 和ρ 通过这两个未知量包含了幅值、相位和频率的参数,因此,通过求解λ 和ρ便能得出所有的目标参数.将公式(6)改写为矩阵形式可得:

DFT 序列Y(k)可由未知参数λ 和ρ 的线性组合表示,在N>2 的情况下,有两个未知参数和N 个可用方程,那么未知参数λ 和ρ 的值可通过解线性方程的方法求得,选择幅值最大和次大的两根谱线,其序号分别记为k1和k2,可构建线性方程组:

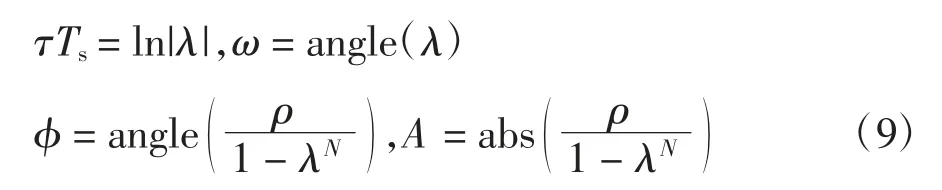
由此求解可得到未知参数λ 和ρ,根据λ 和ρ与幅值频率相位的关系可得:
在三相不平衡的情况下,由于存在负序分量,需要考虑负频成分的干扰,为实现对正序分量参数的准确估计,可将公式(6)扩展为如公式(10)所示:
需要求解的未知数增加为4 个,因此需通过在代表正序分量和负序分量的两处峰值附近选择最大和次大共计四根谱线构建矩阵如式(11)所示,其中等式左侧矩阵代表未知量矩阵.

根据式(11)以及λ+、λ-和ρ+、ρ-的关系,可分别求得λ+、λ-、ρ+、ρ-.将λ+、ρ+代入公式(9),即可得到正序分量的相关参数.
通常情况下,幅值最大和次大两根谱线的选择十分简单,但是在信号频率十分接近工频时,峰值谱线左右两侧的谱线幅值很小,次大幅值谱线的选择会因为噪声的影响导致误判,从而影响估计精度.
将信号的实际角频率记为ω,最大幅值谱线位置记为k1,则

由公式(6)和(10)可得
则任意谱线与Y(k1)存在如下关系式

记k2=k1+1,k3=k1-1,在δ 趋近于0 时,由公式(15)可得:
由公式(16)(17)可知,在δ 趋近于0 时,最大幅值谱线两侧的谱线幅值十分接近,在噪声的影响下,直接地比较幅值大小容易造成次大谱线选择的误判.为了降低噪声对谱线筛选造成的影响,本文采取文献[23]中的方式进行次大谱线的选择:

其中Re 表示取实部,

当Δ--Δ+>0 时,k2=k1+1,Δ--Δ+<0 时,k2=k1-1.
基于复频谱插值DFT 的参数估计方法的流程可总结为如下几个步骤:
1)设定采样参数,同步采集三相电压信号ya、yb、yc.
2)通过克拉克变换,将采集的三相电压信号序列转换为复信号序列ycomplex.
3)以长度为N 的矩形窗截取复信号序列ycomplex并做N 点DFT 得到DFT 序列Y(k).
4)在三相平衡情况下,筛选最大和次大谱线,序号记为k1和k2,并根据公式(8)求解未知参数λ 和ρ.在三相不平衡的情况下,在代表正序分量和负序分量的两处峰值附近选择最大和次大共计四根谱线,并根据公式(11)求解未知参数λ+/-和ρ+/-.
5)根据得到的λ 和ρ 以及公式(9)求解幅值、频率和相位参数.
3 仿真分析
3.1 白噪声影响下的仿真分析
为检验本文所提出方法的性能,本节将在稳态信号与动态信号两种场景下下进行仿真验证.在稳态信号的场景下,通过在不同信噪比(SNR)的条件下,估计稳态信号的参数,并将本文方法与其他方法的估计精度进行对比.在动态信号场景下,分别在幅值阶跃、相位阶跃以及频率斜升三种情况下对算法进行测试,对比本文方法与其他方法的动态跟踪性能.为模拟三相不平衡的情况,所有仿真试验中均在模拟三相信号中加入负序分量,幅值为正序分量的30%.参与对比的方法有两类,一类是加窗插值法,加窗类型分别为最大旁瓣衰减窗和汉宁窗[24];另一类为基于Prony 的参数估计方法,分别为传统Prony方法以及泰勒Prony 方法[19]。
稳态情况下仿真参数设置为:三相信号的基频f=49.5 Hz,采样率fs=6 kHz,幅值A=1,初相位φ=0.1 rad.采样窗长设置为N=256,SNR 变化范围为30 dB 到90 dB,相位频率和幅值估计的均方根误差如图1 所示.
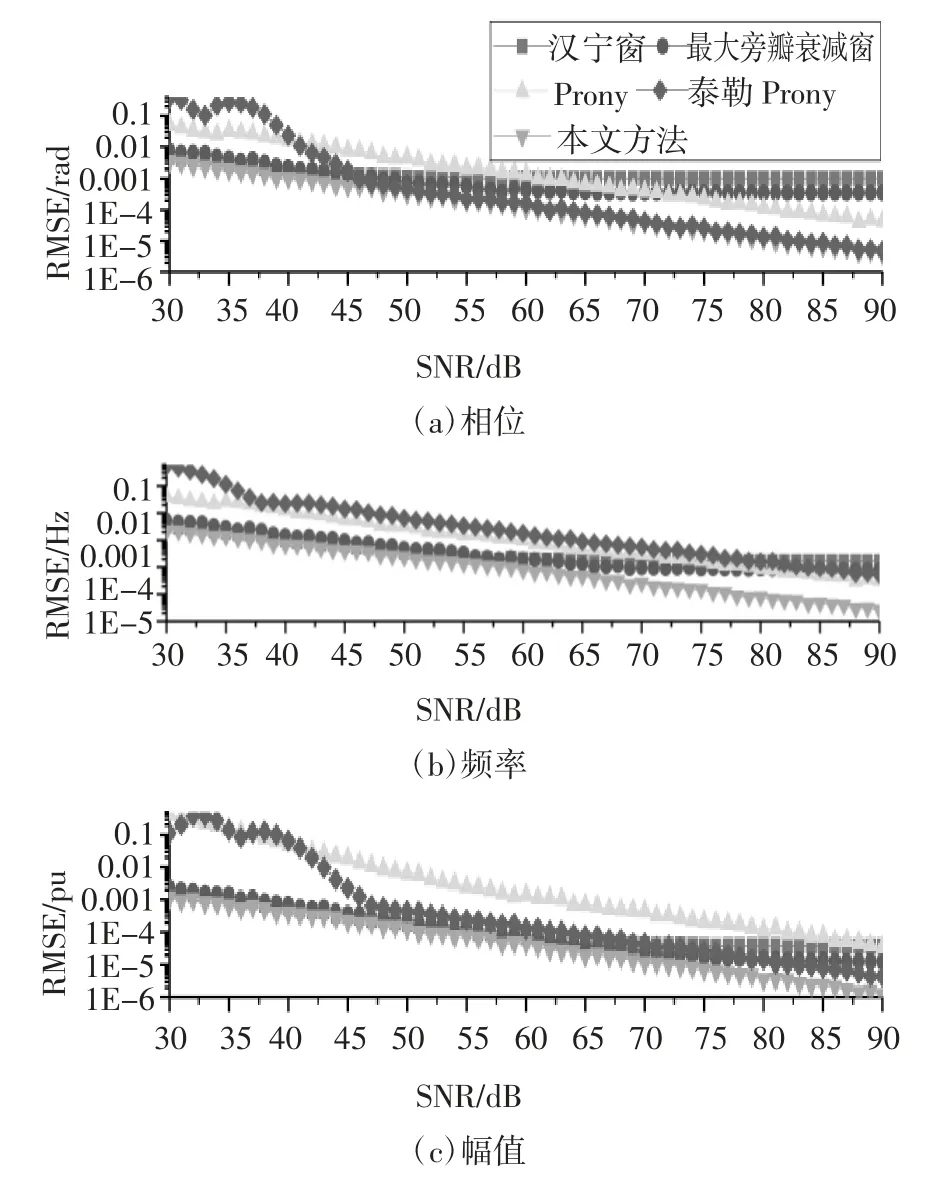
图1 相位、频率与幅值估计误差随信噪比变化图Fig.1 RMSE of phase,frequency and amplitude estimation results versus SNR
在白噪声的影响下,随着信噪比的增加,所有方法的相位,频率和幅值估计结果的均方根误差均呈现下降趋势.不论是在信噪比较低的情况下,还是在高信噪比的条件下,本文方法的估计精度均高于其余方法.基于Prony 的算法在信噪比较低的情况下估计精度较低,但是随着信噪比的提高,估计精度有所提高,并在信噪比高于70 dB 的情况下优于加窗插值算法.
动态情况下,幅值阶跃设置为100%,相位阶跃设置为π/4,频率斜升速率设置为1 Hz/s.初始频率均设置为f=50 Hz.采样率fs=6 kHz,采样窗长设置为N=256,SNR 设置为50 dB.
幅值阶跃情况下的幅值估计结果如图2 所示.所有方法均在1 个周波左右的时间后实现了对幅值的准确跟踪.其中,加窗插值方法延迟略小于一个周波的时间,且波动最小.本文方法在阶跃瞬间估计结果出现超调,约为阶跃值的30%.基于Prony 的估计方法在阶跃瞬间的估计结果出现较大幅度的波动.
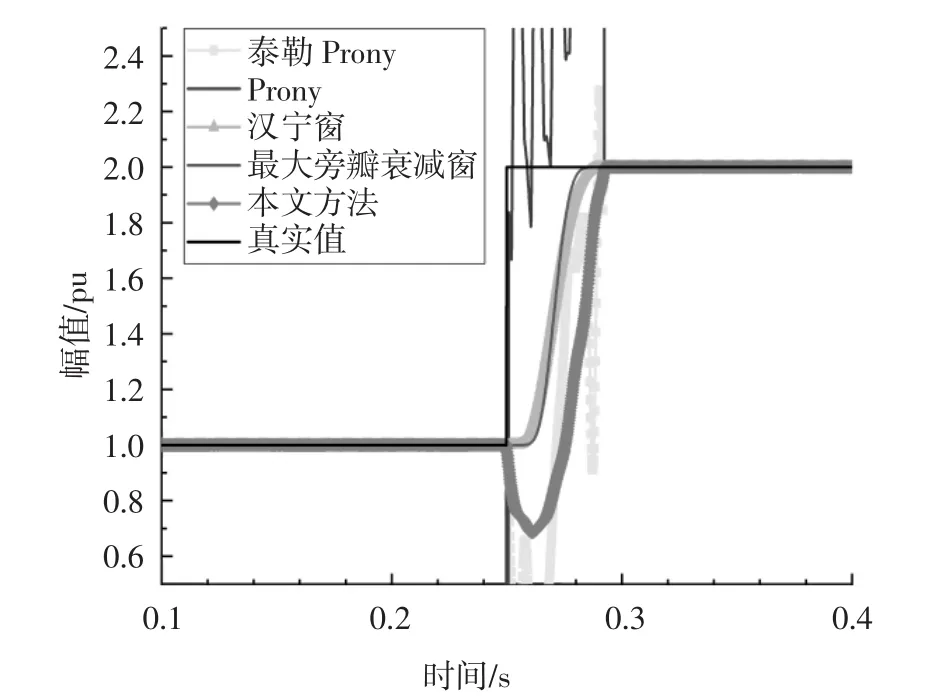
图2 幅值估计结果图Fig.2 Estimation result of amplitude and phase
相位阶跃情况下的相位估计结果如图3 所示.所有方法均在1 个周波左右的时间后实现了对相位的准确跟踪.本文方法在阶跃瞬间超调最小,其余方法的结果均出现了较大的波动.
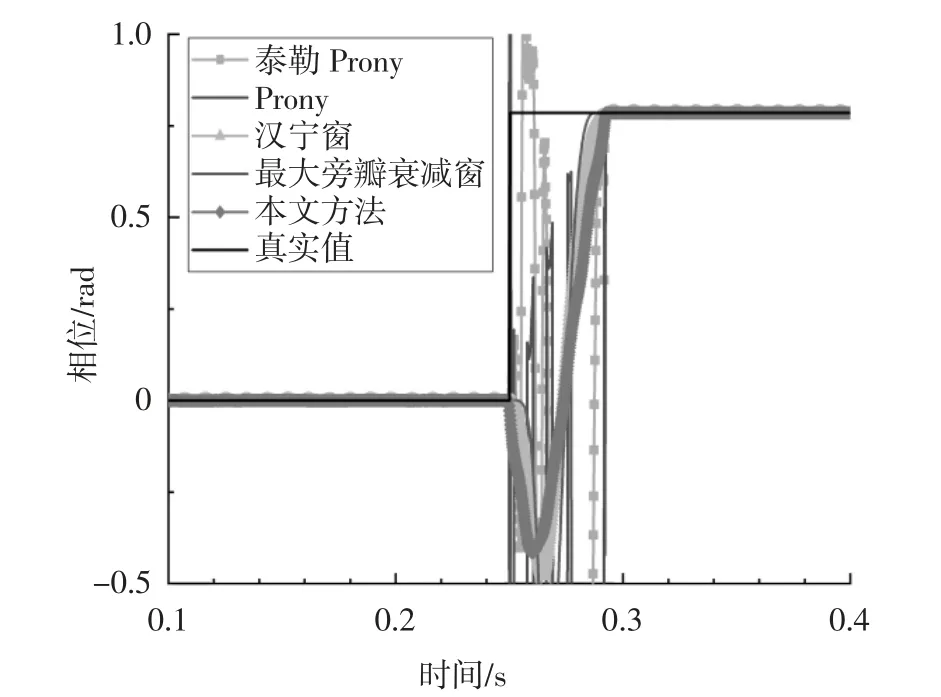
图3 相位估计结果图Fig.3 Estimation result of amplitude and phase
在频率斜升情况下的频率估计结果如图4 所示,本文方法的频率估计结果波动最小,全程实现对频率的准确跟踪,其他方法的估计结果均存在波动,其中基于Prony 方法的结果波动最大.
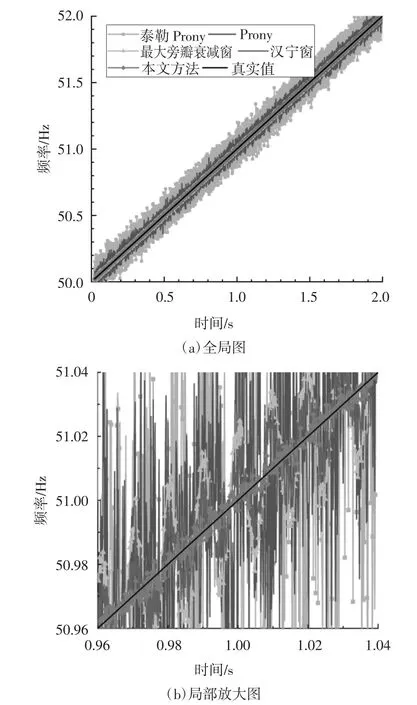
图4 频率斜升估计结果图Fig.4 Estimation result of frequecy ramp
3.2 低频振荡情况下的仿真分析
在低频振荡的情况下,电网信号的各项参数都处于动态变化,本节将通过幅度相位调制信号模拟典型的低频振荡信号,对本文所提出方法的性能进行评估,参与对比的方法为Prony 与泰勒Prony 的参数估计方法.
基于公式(1)的稳态三相系统模型,对幅度与相位进行调制,调制后的幅值与相位的表达式如下所示:

其中A0=1,φ0=0.5,A1=0.1,φ1=0.05,fa=fφ=5,τ1=0.5,τ2=0.4.
基频频率f=50 Hz,采样频率fs=5 kHz,信号的信噪比SNR 设置为60 dB,考虑到在低频振荡的情况下测量结果的实时性,参数估计的延迟最好不要超过一个周波,因此采样窗长设置为N=128.仿真过程采取滑窗的形式,每次滑动1 个点,估计各个时刻幅值和相位参数,算法估计精度通过综合矢量误差(TVE)来评估.
综合矢量误差(TVE)结合了幅值误差和相角误差,是对相量误差的综合衡量,TVE 能够更全面反映出动态相量估计的准确度,本文方法与TFT 方法的TVE 如图5 所示,图中反映了在50 个工频周期数内的最大综合向量误差,可以看到本文的TVE 均保持在0.5%以下,Prony 方法的TVE 最大可达到1.5%,泰勒Prony 方法的TVE 介于本文方法与Prony 方法之间.以此可见本文提出的方法在低频振荡的场景下有更高、更稳定的估计精度.
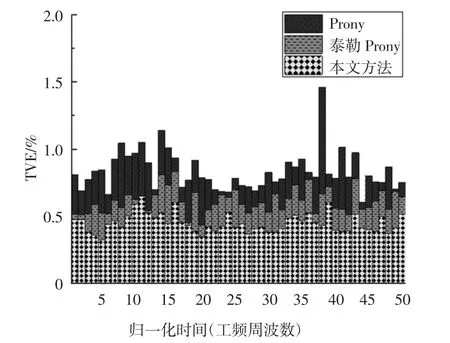
图5 综合矢量误差Fig.5 Total vector error
3.3 三机九节点系统中的仿真分析
为了验证该方法在低频振荡条件下的参数估计性能,本文在IEEE 标准的三机九节点系统进行仿真模拟,三机九节点系统如图6 所示.三机九节点系统采用PSCAD 软件进行仿真.仿真条件设置如下:继电保护装置R 位于7 号和5 号总线之间的线路中.为了在系统中产生低频振荡,在总线7 和总线8 之间的线路中引入三相接地故障,故障在t=1 s 时开始,并在0.2 s 后通过断开位于该线路两端的断路器来清除故障,此时该系统产生低频振荡,继电保护装置R 处可以观测到低频振荡信号.

图6 三机九节点系统Fig.6 IEEE 9 bus system
继电保护装置的采样率设置为5 kHz,采样窗长设置为N =128,约为0.8 个工频周期.本节将对继电保护装置R 处所采集到的三相电压信号进行分析,所有数据在MATLAB 中处理,信噪比SNR=40 dB,其中a 相电压信号如图7 所示.

图7 a 相电压Fig.7 Voltage signal of phase a
幅值估计结果如图8 所示,通过对比可以看出,本文方法在故障发生前、故障发生时、以及故障清除后的三种情况下都能够准确地实现幅值的估计,而且在故障发生时能够对电压骤降实现快速准确的跟踪,在故障发生后约0.02 s 后,本文方法实现了对幅值的正确跟踪,期间与真实值的偏差不超过10%,相较于对比方法,本文方法在故障发生阶段的估计结果波动最小.而Prony 方法与泰勒Prony 方法更易受噪声影响,在故障发生后,估计结果存在较大的波动,偏离真实值最大超过40%以上,无法准确跟踪故障期间电压的变化.
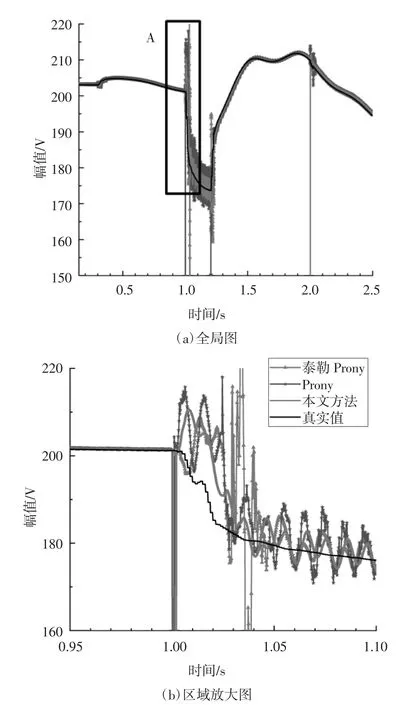
图8 幅值估计结果比较(b 为a 中A 区域的放大图)Fig.8 .Comparison of amplitude measurement results(area A is magnified in b)
4 结论
本文提出了一种基于复频谱插值DFT 的动态振荡信号测量方法.通过等幅值克拉克变换,将三相系统中的参数估计问题转换为复指数信号的参数估计,通过引入指数衰减系数,构建三相信号模型,并基于所构建模型对各项估计参数进行了推导,给出了各项参数的表达式.通过理论仿真与电力系统模型仿真验证,结果均表明本算法具有良好的性能,主要体现在以下方面:
1)本文所提出的方法可在采样点数较少的情况下实现对频率幅值的准确测量,且能在信噪比较低的场景下提供较为准确的估计结果.
2)在处理动态信号时,仿真实验的结果表明,本文所提出的方法在抗噪性能和动态参数估计性能上都具有一定优势,可以在噪声干扰的情况下对低频振荡状态下的三相信号参数进行较为准确的估计.
3)本文方法最多只需要四根DFT 谱线的参数即构建矩阵实现对参数的估计,运算量主要为DFT 运算,而且只需采集一个周波左右长度的数据即可,现有DSP 的运算能力足以满足本文方法的需求,因此本文方法可移植至嵌入式平台进行应用.
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19 13:26:28
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
电子测试(2018年11期)2018-06-26 05:56:02
雷达学报(2017年3期)2018-01-19 02:01:27
统计与决策(2017年2期)2017-03-20 15:25:22
数学物理学报(2016年5期)2016-08-24 07:38:48
系统工程与电子技术(2016年2期)2016-04-16 05:17:08
电源技术(2015年12期)2015-08-21 08:58:44
西南石油大学学报(自然科学版)(2015年5期)2015-04-16 05:12:24
