一种边灯式FOD探测设备伺服控制系统设计
2021-11-03 01:58桑青华朱伟林
现代信息科技 2021年8期
桑青华 朱伟林

DOI:10.19850/j.cnki.2096-4706.2021.08.012
摘 要:文章分析了边灯式FOD探测设备伺服控制系统的特点,从转台框架设计、伺服控制器硬件设计和伺服控制器软件设计三个方面介绍了伺服控制系统的设计与实现。结构上采用步进电机经行星减速机构及齿轮副减速的形式,伺服控制器硬件采用TMS320F28335作为主处理芯片,软件采用模块化方法进行设计和实现。该伺服控制系统已完成实现,并已通过了高低温及振动冲击环境试验,能够满足工作方式、精度、环境适应性和远程更新等需求。
关键词:FOD;转台结构设计;伺服控制器;伺服控制软件
中图分类号:TP273+.5;TP29 文献标识码:A 文章编号:2096-4706(2021)08-0042-04
Design of a Servo Control System of Side Lamp FOD Detection Equipment
SANG Qinghua,ZHU Weilin
(The 38th Research Institute of China Electronics Technology Group Corporation,Hefei 230088,China)
Abstract:This paper analyzes the characteristics of servo control system of side lamp FOD detection equipment,and introduces the design and implementation of servo control system from three aspects:turntable frame design,servo controller hardware design and servo controller software design. In the structure,the stepping motor is decelerated by planetary reduction mechanism and gear pair,the hardware of servo controller adopts TMS320F28335 as the main processing chip,and the software is designed and implemented by modular method. The servo control system has been realized and has passed the environmental tests of high and low temperature and vibration shock,which can meet the requirements of working mode,accuracy,environmental adaptability and remote update.
Keywords:FOD;turntable structure design;servo controller;servo control software
0 引 言
机场跑道异物(Foreign Object Debris,FOD)的快速定位和检测已成为飞机飞行安全的重要保障[1],雷达和图像处理技术的发展使自动检测跑道异物成为可能,然而,若使雷达或相机在FOD探测中真正发挥作用,必须依赖高性能的控制平台作为载体[2],伺服转台可作为其运动载体。雷达与摄像设备以固定或移动方式监测整条跑道[1],固定方式主要有边灯式和塔式,本文研究的是边灯式FOD探测设备的伺服控制系统。
作为雷达和相机的运動载体(并为跑道异物定位提供数据[3]),此伺服控制系统应具有较高的位置控制精度和较好的运动平稳度。边灯式安装方式是将设备安装在跑道边缘,工作环境受日照强度、近地面二次辐射、环境温度[4]以及飞机尾流强风等影响,对转台的环境适应性提出了较高的要求。因机场流量大,为后期设备调试和维护升级少占用跑道时间,转台设备软件应具有远程升级功能。
本文从转台框架设计、伺服控制器硬件设计和伺服控制软件设计等方面系统介绍了某边灯式FOD探测设备伺服控制系统的设计与实现。在结构设计上充分考虑了系统精度要求和飞机尾流强风影响,伺服控制器设计采用TI的32位浮点型芯片TMS320F28335作为主处理芯片,软件设计上采用模块化设计方法。目前该伺服控制系统已经实现,满足系统精度和工作方式等要求,并通过了高低温和振动冲击环境试验,系统运行稳定,环境适应性强。
1 伺服控制系统总体设计
伺服控制系统的主要功能是接收雷达分系统的控制指令,驱动转台运转,承载雷达和相机按照期望工作模式运动到期望位置,并向雷达和相机反馈转台当前位置。
伺服控制系统设计主要包括转台框架设计、伺服控制器硬件设计和伺服控制器软件设计,如图1所示。转台框架设计主要包括伺服转台结构设计和主要器件选型;伺服控制器硬件设计主要实现伺服控制电路板各功能模块,伺服控制器软件设计主要完成系统数据采集、逻辑运算和控制驱动等功能实现。
2 伺服控制系统转台框架设计
2.1 转台框架结构设计
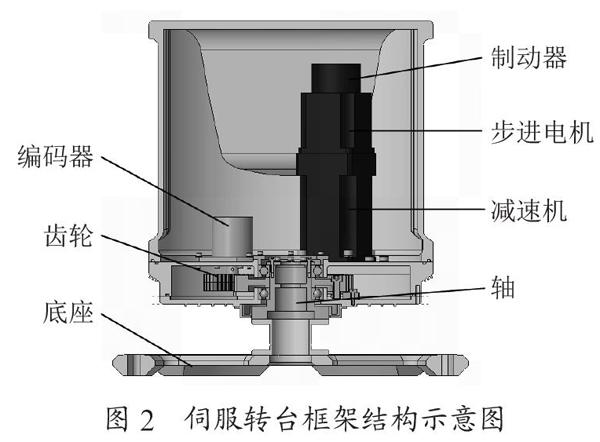
转台框架设计为单轴旋转结构,由底座、框架、电机驱动组合、齿轮传动组合、角度检测机构及旋转组合等部分组成,如图2所示。
电机驱动结构采用步进电机经行星减速机构及齿轮副减速后,通过电控实现转台运动。为防止转台在高速飞机尾流下过冲导致设备损坏,电机末端加装制动器,在转台不工作或掉电情况下,可抱闸锁定。齿轮传动组合中安装偏心套,可消除齿轮传动间隙。同时,角度传感器部分经双片齿轮减速输出至绝对值编码器进行测量,可消除角度检测的间隙和误差,确保转台旋转满足精度要求。设备整体框架采用圆柱形造型设计,可减少风载荷对设备的附加载荷。框架各零部件安装接口处设计有密封槽保证设备密封性。
2.2 主要结构件选型
2.2.1 电机驱动组合选型
转台驱动系统需克服转台工作时的惯性力矩、摩擦力矩和低温时轴承附加力矩等。根据设备整体尺寸、功率、性能需求及成本分析,选用某型号两相四线制步进电机,工作电压10~48 V,额定电流3 A,静扭矩1.5 Nm,步距角1.8°。制动器选用弹簧式断电刹车,额定电压24 V。减速机采用某型号行星齿轮减速器,减速比36,额定扭矩50 Nm。末级传动链采用大、小齿轮传动方式,传动比3.6。
2.2.2 角度传感器
光电编码器具有精度高、响应快、抗干扰能力强的优点,因此本系统采用光电编码器作为角度传感器。系统精度要求0.1°,故编码器最终分辨率应大于12位;为避免系统意外掉电导致的寻零位问题,选用绝对值编码器;伺服控制系统主轴与编码器的传动比为1:2,为方便后期软件设计中圈数判断,选用多圈编码器。综上,本系统选用某型号的15位多圈绝对值式编码器,该编码器工作电压为+5 V,通信接口为RS485,支持Modbus协议。
3 伺服控制器硬件设计
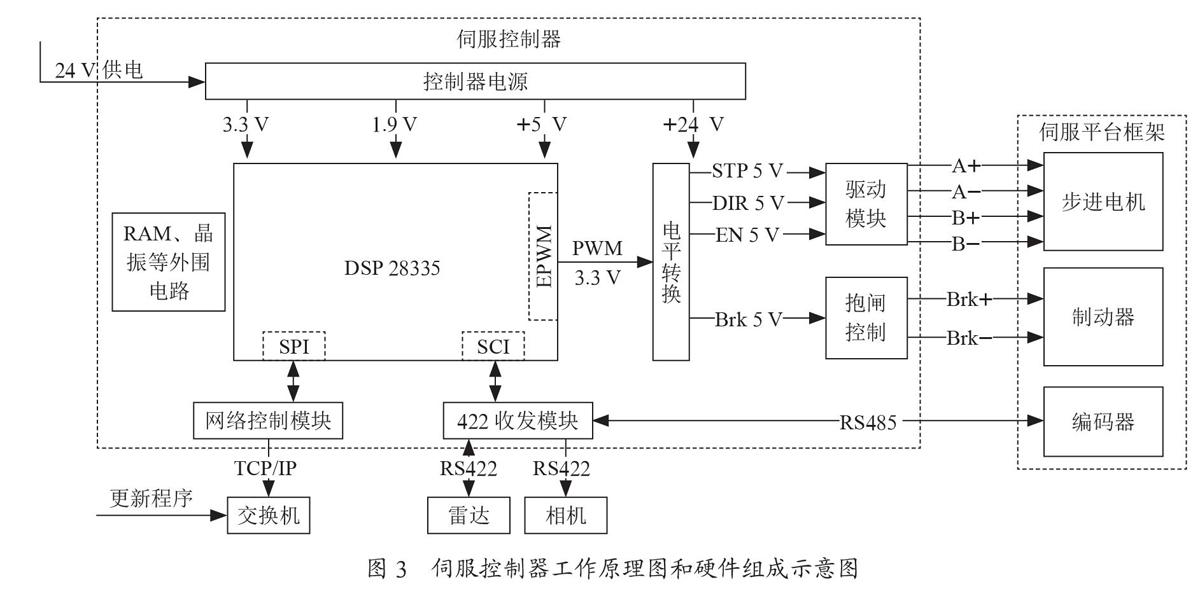
伺服控制器工作原理和硬件主要组成如图3所示。
伺服控制器接收雷达分系统的工作模式、定位角度等工作指令,通过编码器检测转台框架角度位置,综合工作指令和控制算法产生驱动信号,经功率放大后驱动电机运转,实现雷达分系统所期望的运动控制,并向雷达分系统和相机反馈伺服分系统的实时角度等状态信息。非超载情况下,电机转速和停止位置只取决于脉冲信号的频率和脉冲数[5],改变脉冲频率即可改变转台运动速度,控制PWM脉冲数量即可控制转台角位移量,改变驱动模块的DIR信号电平可以控制转台运动方向。同时,系统设计了网络接口,通过连接到外部交换机上,可方便地实现远程程序更新。
伺服控制器以32位浮点型芯片TMS320F28335为主处理芯片,该芯片主频可达150 MHz,指令周期为6.67 ns,具有强大的运算能力。伺服控制器硬件电路主要包括以下功能模块:DSP及其外围电路、电源管理模块、通讯控制模块、驱动控制模块、制动器控制模块等。各模块的实现方式及功能为:
(1)DSP及其外部电路。包括512 kB×16位大小的RAM扩展、30 MHz晶振时钟电路、JTAG电路等。DSP电路模块主要完成逻辑判断、控制运算、系统通信等功能。
(2)电源管理模块。主要实现防雷防浪涌和所需的电源转换功能。防雷防浪涌功能采用两级保护电路实现,第一级采用GDT气体放电管+电感,第二级采用TVS瞬态电压抑制二极管。系统外部供电为+24 V,伺服控制器硬件所需电源有+24 V、+5 V、+3.3 V和+1.9 V,其中+24 V到+5 V以及+5 V到3.3 V和1.9 V的电源转换由此模块实现。
(3)通信控制模块。包括RS422通信接口和网络接口。RS422通信通过DSP的SCI模塊和RS422收发驱动芯片实现,网络接口通过DSP的SPI模块和网络控制芯片W5500实现。由于所选择的编码器为RS485半双工通信接口,为实现控制器小型化设计,充分利用422收发模块芯片功能,设计中利用RS422全双工接口实现编码器角度数据的采集,只需在接线时将RS422的T+和R+与RS485的A相连,将RS422的T-和R-与RS485的B相连,同时在软件设计时注意区分收发时序即可实现。
(4)驱动控制模块。TMS320F28335具有6个EPWM模块,可以输出PWM控制信号,但DSP输出信号电平为3.3 V,电机驱动芯片控制信号所需电平为5 V,因此需实现电平匹配。驱动控制模块主要实现3.3 V到5 V的电平转换,并实现步进电机相电压的生成。为提高步进电机控制精度,降低步进电机的振动和噪声,驱动器细分设置为8。
(5)抱闸控制模块。此模块与驱动控制模块类似,DSP输出的PWM信号经3.3 V到5 V电平转换后,控制MOSFET的通断实现DC/DC转换,进而改变制动器两端电压。
4 控制器软件设计
伺服控制软件是整个伺服控制系统的大脑,系统逻辑与控制功能最终都需要通过软件实现。本系统软件主要完成数据采集、数据分析与处理、电机驱动、设备间通信、远程更新等功能。控制器软件采用模块化设计方法,主要模块划分如图4所示。
伺服控制器软件各模块功能为:
(1)系统初始化模块。主要实现系统上电后DSP的GPIO、SCI、EPWM、SPI等的初始化,网络通信相关参数和寄存器的初始化,系统变量初始化,电机驱动器和制动器初始化等,此模块在主程序部分完成。
(2)系统自检模块。系统初始化完成后进入自检模式,自检完成后等待雷达分系统的控制指令,自检结果传送给雷达分系统,此模块在主程序部分完成。
(3)角度采集模块。编码器设置为高速自动上传模式,更新频率为200 Hz,利用DSP的SCIB完成角度数据采集与解析。由于存在加工误差、结构安装误差,系统安装完成后,利用激光跟踪仪或全站仪对角度检测误差进行标定,并在软件中采用“查表+线性插值”的方法进行补偿。此模块在DSP的SCIRXINTB中断处理部分实现。
(4)指令接收处理模块。利用DSP的SCIA接收雷达分系统工作模式和控制指令,并进行解析处理。根据结构设计的转动范围,增加软限位保护,防止过冲对设备造成损坏。此模块在DSP的SCIRXINTA中断处理部分实现。
(5)控制算法模块。采用位置、速度双闭环控制,如图5所示,系统综合雷达分系统的工作指令、当前框架角度和PID控制算法,产生驱动信号,经功率放大后驱动电机运转。因空间有限,系统未设置速度传感器,只安装编码器作为角度传感器,软件设计中通过对角度位置取微分的方式计算速度分量,为避免速度分量噪声过大,采用滑动平均值法进行滤波处理。控制算法对实时性要求高,此模块在DSP的timer0中断处理部分实现,控制周期取5 ms。
(6)抱闸控制模块。在电机转动过程中,应使制动器保持带电松闸状态。利用DSP的EPWM模块输出脉冲波形,调节脉冲占空比可改变施加在制动器两端的电压值。系统选用的制动器额定电压为24 V,上电松闸后,当两端施加电压降低至小于7 V时,制动器将抱闸制动。为降低系统热耗,给制动器上电松闸后,在电机工作期间,减小脉冲占空比使制动器两端电压保持在10 V左右(留有一定余量);需要制动时将占空比减小为0,使制动器两端电压为0而抱闸制动。抱闸控制模块对实时性要求不高,此模块在DSP的timer0中断处理部分实现,控制周期取50 ms。
(7)网络更新模块。采用TCP/IP协议,利用DSP的SPI模块完成程序的远程更新功能,此模块在DSP的SPIRXINTA中断处理中实现。
5 结 论
本文从框架结构设计、伺服控制器硬件设计和伺服控制软件设计等方面详细介绍了某边灯式FOD探测设备伺服控制系统的设计与实现。目前,该FOD探测设备伺服控制系统已完成实现,使用激光跟踪仪进行角度标定并进行软件补偿后,定位精度优于0.1°,具有扇扫、定位、自检和停止等工作模式,具备抗高速飞机尾流、软件远程更新功能。该系统通过了-30 ℃~60 ℃的高低温试验和加速度为2 g、频率为10 Hz~150 Hz的扫频振动冲击试验,试验结果表明系统运行平稳,对环境适应性强。
参考文献:
[1] 张艳,孙灿飞,郑国,等.机场跑道异物检测技术的研究与进展 [J].航空科学技术,2017,28(5):14-18.
[2] 孙久荣,王大明,李寒.基于STM32的FOD雷达转台控制系统的设计 [J].计算机与数字工程,2015,43(12):2288-2290.
[3] 郭晓静,于之靖.機场跑道异物定位算法研究 [J].测控技术,2012,31(5):41-44.
[4] 刘双富,余南阳.机场跑道义务探测系统光学探测转台温度控制试验研究 [J].制冷与空调,2019,33(1):98-102.
[5] 党威望,岳改丽.基于DSP的四相步进电机控制系统设计 [J].计算机技术与自动化,2017,36(12):51-54.
作者简介:桑青华(1986—),女,汉族,河南商丘人,工程师,硕士研究生,主要研究方向:伺服控制设计。
收稿日期:2021-03-14