卡尔曼滤波在目标跟踪中的应用研究
2021-11-03 09:24:00中国电子科技集团公司第二十研究所刘翌祥
电子世界 2021年18期
中国电子科技集团公司第二十研究所 刘翌祥
武器系统的快速发展对目标跟踪精度的要求越来越高,由于系统环境包括各种各样的干扰,卡尔曼滤波器凭借其优良的噪声处理能力而被广泛应用。工程实践中由于系统环境存在随机干扰,导致观测得到的信号中含有随机噪声,往往不能直接得到状态变量的真实值;通过算法单独分离出目标运动状态是很难实现的,卡尔曼滤波器就是降低噪声解决这类问题的好方法。
卡尔曼滤波就是通过不断迭代,一步步递推计算,逐步得到测量目标模型的最优估计值,这种不断逼近最优的方法是目标跟踪中最热门的一种算法,通过一系列处理算法,建立近似的目标运动轨迹,对目标状态进行实时估计和预测,根据估计值对目标进行评估。本文主要介绍了卡尔曼滤波算法的基本原理,并通过其在目标跟踪数据处理系统中的应用,结合轨迹仿真进行了研究分析。
1 卡尔曼滤波算法
现代目标滤波系统中应用最广泛的是卡尔曼滤波算法,以卡尔曼滤波为基础后续发展起来其他衍生算法。随着连续系统卡尔曼滤波的推广,彻底实现了滤波算法在解决工程实际问题中的实用性。
卡尔曼滤波算法以最优条件估计为目标,以误差方差值最小为准则,将从目标模型中得到的测量值一步步递推实时获取新时刻的状态估计值。卡尔曼滤波算法中的目标状态值,是由目标状态空间方程、滤波观测方程加上实时测量噪声和系统噪声逐步地推计算得到的。
在目标跟踪过程中,目标的测量时刻都有各种干扰噪声。卡尔曼滤波实质上就是通过基于目标的运动特征,来减小甚至消除噪声,实现达到最优估计的效果,具有以下优点:
(1)系统增益可以动态计算,同一个滤波设计适用于多种机动状态。
(2)利用协方差矩阵快速地对估计精度进行准确测量。
(3)通过对残差的变化分析,来判断当前目标运动模型是否可靠。
(4)卡尔曼增益序列根据运动状态自适应改变,实现最优的滤波效果。
卡尔曼滤波主要分为两个阶段:预测阶段和更新阶段。
目标状态方程及量测方程为:

取上一步的状态值与控制矩阵计算当前状态初步预测。
在进行实证分析之前,先对六个指数收益率序列进行描述性统计分析,这样有利于后文更好地分析数据之间的相依性。
状态值与协方差矩阵的初步预测为:

更新阶段实现测量值与估计状态值结合,得到最新估计状态值,并且计算得到滤波增益权衡数据。卡尔曼增益为:

状态更新为:

协方差更新为:

由更新阶段方程发现,更新后的目标状态值其实相当于给先前预测值加上含有增益值的修正项,每一步推进都需要重新计算使得计算量骤增,这就引出滤波对应的优势,其增益可以单独计算。
滤波适用于匀加速运动的目标,定义为目标机动指数,可通过机动指数调整增益大小,使滤波器性能得到改善。
其中:

滤波增益为:

对于目标做随机机动时,卡尔曼滤波的性能就要比其他滤波算法更好,而且还有很好的适应能力,可以实时对状态值等进行处理,得到当前时刻误差,这些优势可以便于后续来进行控制系统设计。
2 目标系统仿真
通过仿真三种机动方式的目标轨迹,在验证αβγ滤波、卡尔曼滤波算法的可行性同时,针对算法对强、弱机动目标、复杂机动目标跟踪过程进行分析比较。
由图1可知,αβγ滤波轨迹基本符合目标轨迹。随着估计的进行,估计误差仅有噪声产生的起伏,说明估计的有效性。图2对目标真实轨迹和两种滤波轨迹进行比较,发现滤波轨迹偏差比较小,说明滤波算法有良好的滤波性能,同时局部放大图显示出了卡尔曼滤波相比较于αβγ滤波的误差更小,直观表现了卡尔曼滤波能更好的对机动目标进行滤波跟踪。

图1 弱机动目标轨迹对比图

图2 强机动目标轨迹对比图
由图3看出对于做较复杂运动的目标,卡尔曼滤波轨迹可以较好跟踪,但会在目标转弯时跟踪效果变差。由图4可以得出,随着滤波估计进行,滤波轨迹越来越贴合实际轨迹,估计误差的起伏也逐渐减小,趋于收敛,说明卡尔曼滤波能发挥其优良的滤波性能,对目标轨迹很好的进行预测估计。

图3 复杂机动目标轨迹对比图
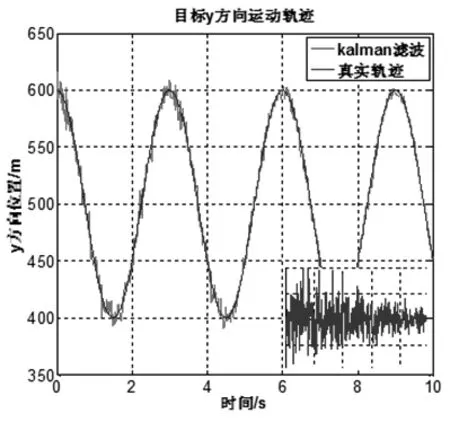
图4 y方向轨迹对比图
通过Matlab对卡尔曼滤波在目标跟踪中的应用进行了轨迹仿真,递推形式使其便于实时处理,轨迹仿真曲线及误差结果证明了其相对于其他滤波算法有更好的性能优势。但是需要着重考虑的是,卡尔曼滤波算法跟踪结果好坏与建立的目标状态模型、噪声模型等有关,同时受到初始条件及测量矩阵等的影响,若选取差距过大就会导致滤波器的实际误差大于估计,且随时间不断增大最终发散。
猜你喜欢
装备制造技术(2020年3期)2020-12-25 05:21:52
交通运输系统工程与信息(2020年4期)2020-09-01 02:34:02
电子技术与软件工程(2020年3期)2020-06-12 07:09:20
当代陕西(2019年12期)2019-07-12 09:12:02
汉语世界(The World of Chinese)(2019年1期)2019-03-18 01:50:16
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
计算机应用(2016年6期)2016-06-28 08:30:16
电源技术(2016年9期)2016-02-27 09:05:39
电源技术(2015年1期)2015-08-22 11:16:28
小哥白尼·军事科学画报(2014年8期)2015-04-07 03:54:50