
无刷双馈电机发电控制策略研究
2021-10-31 00:21周少珍李雪桓吴明孝杨涛赵书杰
河南科技 2021年15期
周少珍 李雪桓 吴明孝 杨涛 赵书杰
摘 要:针对无刷双馈电机在静止坐标系中的电压电流磁链等空间相量具有交变耦合的特点,提出了一种矢量解耦控制策略。该控制策略中,基于同步速坐标系统下功率绕组磁链定向,可实现各空间相量解耦独立控制。仿真验证表明,在此种控制策略下能快速准确地实现独立稳定发电。
关键词:无刷双馈电机(BDFM);变速恒频;补偿控制;矢量解耦
中图分类号:TM301.2 文献标识码:A文章编号:1003-5168(2021)15-0030-04
Abstract: A vector decoupling control strategy is proposed for Brushless Doubly Fed Machine(BDFM) which has the characteristics of alternating coupling of space phasors such as voltage, current and flux linkage in static coordinate system. In this control strategy, based on the flux orientation of power winding in the synchronous speed coordinate system, the decoupling and independent control of each space phasor can be realized. The simulation results show that the independent and stable power generation can be realized quickly and accurately under this control strategy.
Keywords: Brushless Doubly Fed Machine(BDFM);variable speed constant frequency;compensation control;vector decoupling
1 研究背景
无刷双馈电机(Brushless Doubly Fed Machine,BDFM)在具有普通双馈发电机结构简单牢固和运行方式多样等优点的基础上,省去了转子上的电刷和滑环,大大提高了运行可靠性。因其速度和功率因数均可调节,可同步运行又可异步运行,在大容量调速系统和变速恒频发电系统中获得了广泛应用,取得了较大的社会效益。当BDFM并网发电和独立运行进行发电时,它的控制目标和控制策略不同[1-2]。本文将对BDFM在独立发电运行状态时的控制策略进行研究。
2 无刷双馈电机控制策略
2.1 无刷双馈电机数学模型
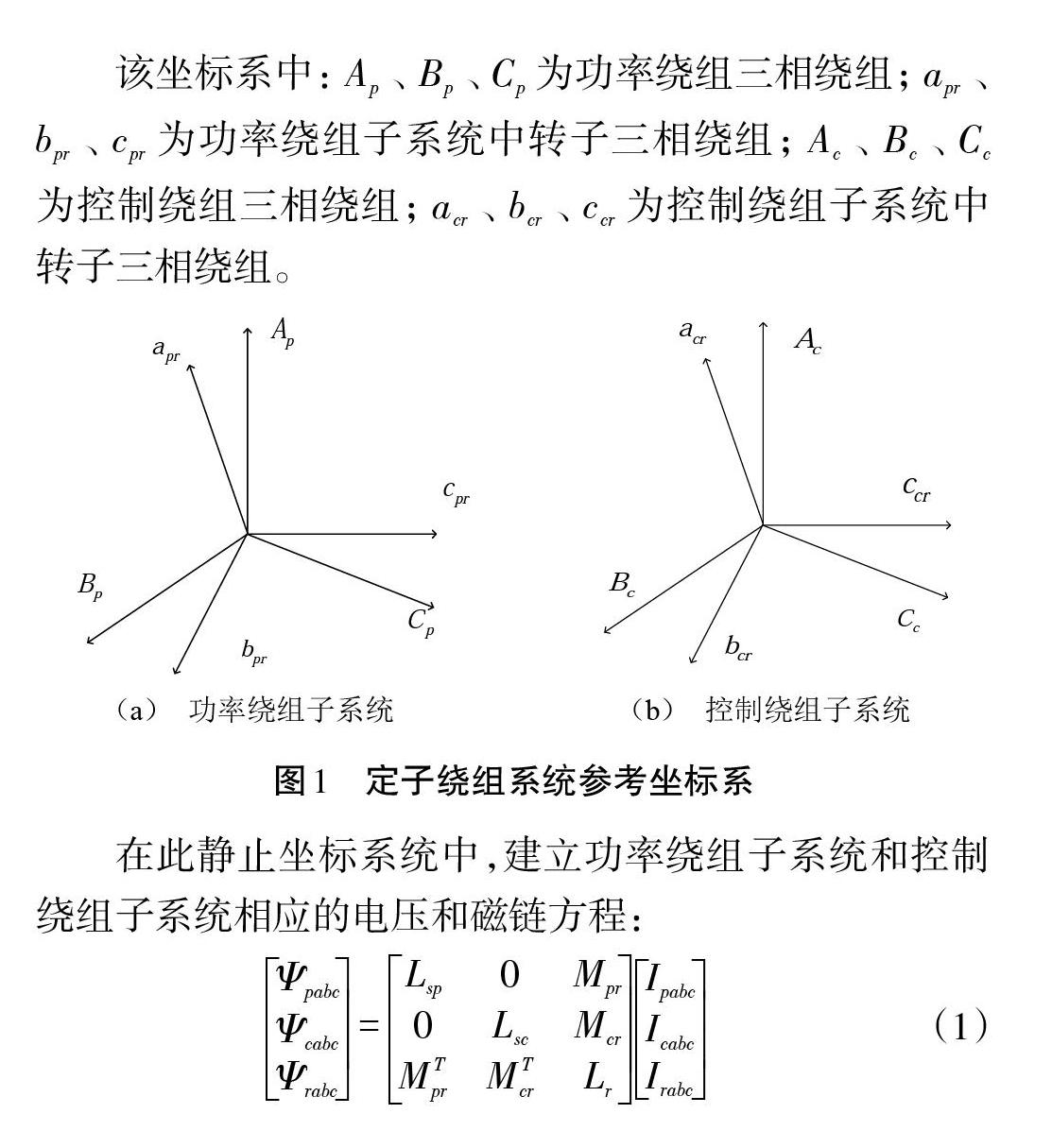
首先,考虑在静止三相ABC坐标系下建立BDFM的运动模型,如图1所示。假设电机定转子气隙均匀,绕组均匀分布,忽略无用的空间谐波,不计铁磁磁滞和涡流影响等[3]。
该坐标系中:[Ap]、[Bp]、[Cp]为功率绕组三相绕组;[apr]、[bpr]、[cpr]为功率绕组子系统中转子三相绕组;[Ac]、[Bc]、[Cc]为控制绕组三相绕组;[acr]、[bcr]、[ccr]为控制绕组子系统中转子三相绕组。
式(1)至式(4)中:下标[sp]表示功率绕组ABC的相关变量参数;下标[sc]表示控制绕组[a]、[b]、[c]的相关变量参数;下标[r]代表与转子有关的变量参数;[Ψpabc]为功率绕组磁链;[Ψcabc]为控制绕组磁链;[Ψrabc]为转子绕组磁链;[Lsp]为功率绕组之间互感矩阵;[Mpr]为功率绕组与转子绕组间互感矩阵;[Upabc]和[Ipabc]为功率绕组三相电压和电流;[ Zspr]和[Zscr]分别表示功率绕组、控制绕组与转子绕组间的互电抗矩阵。
转子绕组中各空间向量关系如下:
式(5)至式(8)中:[ upra]、[ uprb]、[ uprc]为转子绕组中功率绕组电压分量;[ ipra]、[ iprb]、[ iprc]为转子绕组中功率绕组电流分量;[ φpra]、[ φprb]、[ φprc]为转子绕组中功率绕组磁链分量;[ ucra]、[ ucrb]、[ ucrc]为转子绕组中控制绕组电压分量;[ icra]、[ icrb]、[ icrc]为转子绕组中控制绕组电流分量;[ φcra]、[ φcrb]、[ φcrc]为转子绕组中控制绕组磁链分量;[ rrp]和[ rrc]为转子绕组中功率绕组和控制绕组电阻分量。
2.2 同步速坐标系数学模型
BDFM异于普通异步電机之处在于其气隙磁场中存在两种不同转速的同步旋转磁场,无法像一般交流电机可以采用同一个唯一的同步坐标系。
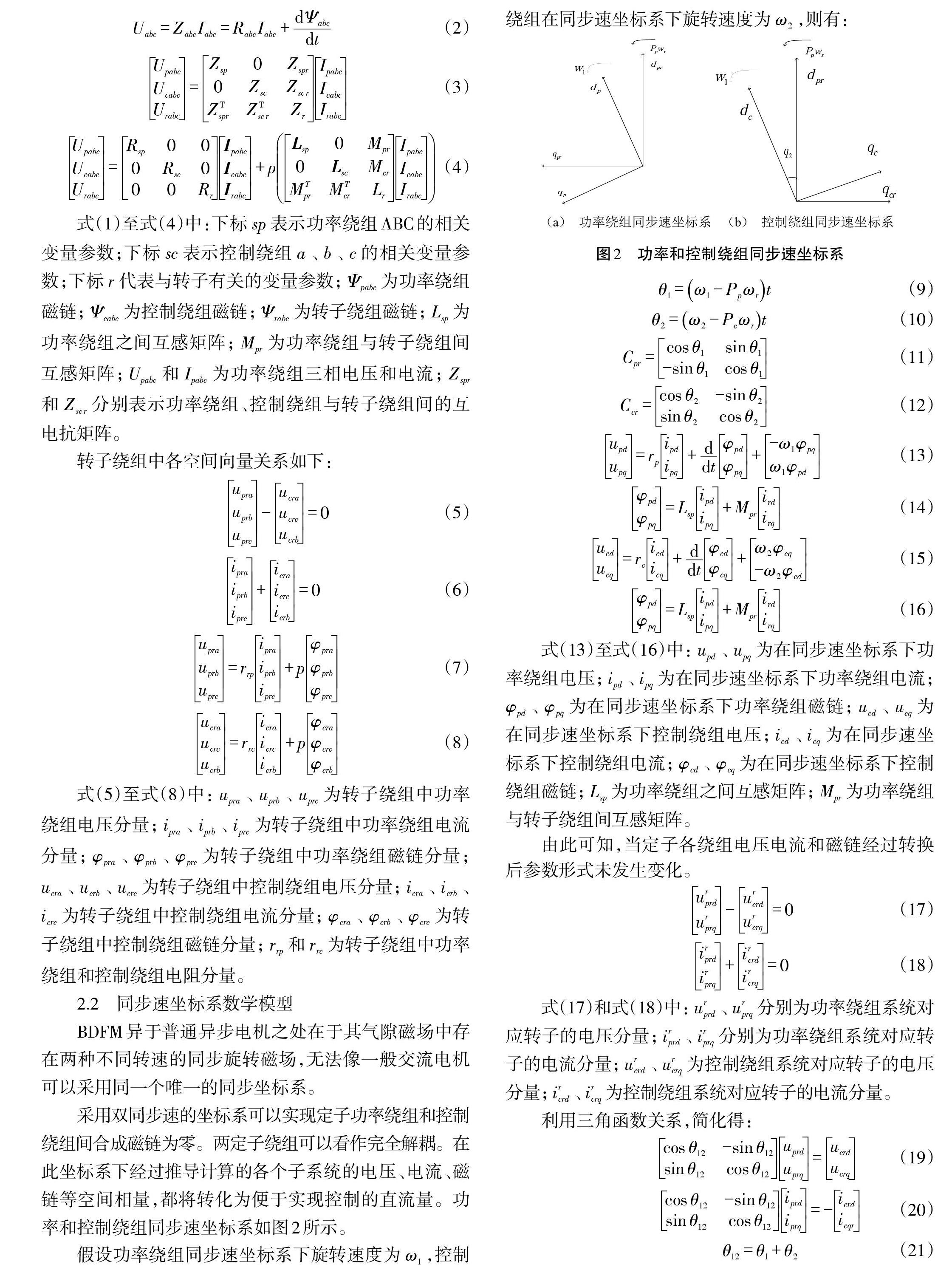
采用双同步速的坐标系可以实现定子功率绕组和控制绕组间合成磁链为零。两定子绕组可以看作完全解耦。在此坐标系下经过推导计算的各个子系统的电压、电流、磁链等空间相量,都将转化为便于实现控制的直流量。功率和控制绕组同步速坐标系如图2所示。
假设功率绕组同步速坐标系下旋转速度为[ω1],控制绕组在同步速坐标系下旋转速度为[ω2],则有:
式(13)至式(16)中:[ upd]、[ upq]为在同步速坐标系下功率绕组电压;[ipd]、[ipq]为在同步速坐标系下功率绕组电流;[φpd]、[φpq]为在同步速坐标系下功率绕组磁链;[ ucd]、[ ucq]为在同步速坐标系下控制绕组电压;[icd]、[icq]为在同步速坐标系下控制绕组电流;[φcd]、[φcq]为在同步速坐标系下控制绕组磁链;[Lsp]为功率绕组之间互感矩阵;[Mpr]为功率绕组与转子绕组间互感矩阵。
由此可知,当定子各绕组电压电流和磁链经过转换后参数形式未发生变化。
式(17)和式(18)中:[urprd]、[urprq]分别为功率绕组系统对应转子的电压分量;[irprd]、[irprq]分别为功率绕组系统对应转子的电流分量;[urcrd]、[urcrq]为控制绕组系统对应转子的电压分量;[ircrd]、[ircrq]为控制绕组系统对应转子的电流分量。
2.3 无刷双馈电机控制策略
BFDM的开环运行状态可归纳为动态响应交叉,精度较低,不能精确独立发电。闭环控制策略简单归纳如下:文献[4]中建立了BDFM的小信号模型,在维持稳定运行状态方面有显著成效,但无法满足动态响应迅速的要求;文献[5]直接转矩控制基本原理是利用空间矢量计算磁链和转矩的大小,从而改变实现功率变换器PWM的输出来控制电机的动态行为,其动态性能较优良,但计算量太大,对控制器硬件和成本要求较高;转子磁场定向控制方法简化了数学模型,实现难度与感应电机的转子磁场定向控制相当,且动态性能优良。
本文采用的控制策略为将电机的空间相量参数转化为双同步速的坐标系统。为了实现输入电流充分解耦,在上述同步速坐标系下功率绕组子系统的[d]轴方向与功率绕组总磁链方向始终重合,此时[q]轴方向与磁链和磁链微分均为零,同时引入电流状态反馈和电压的前馈补偿。
式中:[icrd]和[icrq]为控制绕组子系统在同步速坐标系下的电流;[Lmc]为功率绕组主电感;[Lsc]为功率绕组电感;[Mpr]和[Mcr]为功率绕组和控制绕组与转子之间的互感;[Lrp]为功率绕组子系统中转子绕组电感;[Lrc]为控制绕组子系统中转子绕组电感;[Lmpr]、[Lmcr]为转子绕组中对应功率绕组和控制绕组电感;[Lrσ]为转子绕组漏电感;[rp]为功率绕组电阻;[rc]为控制绕组电阻;[rr]为转子绕组电阻。需要注意,有[Lrp+Lrc=Lmpr+Lmcr+Lrσ]成立。
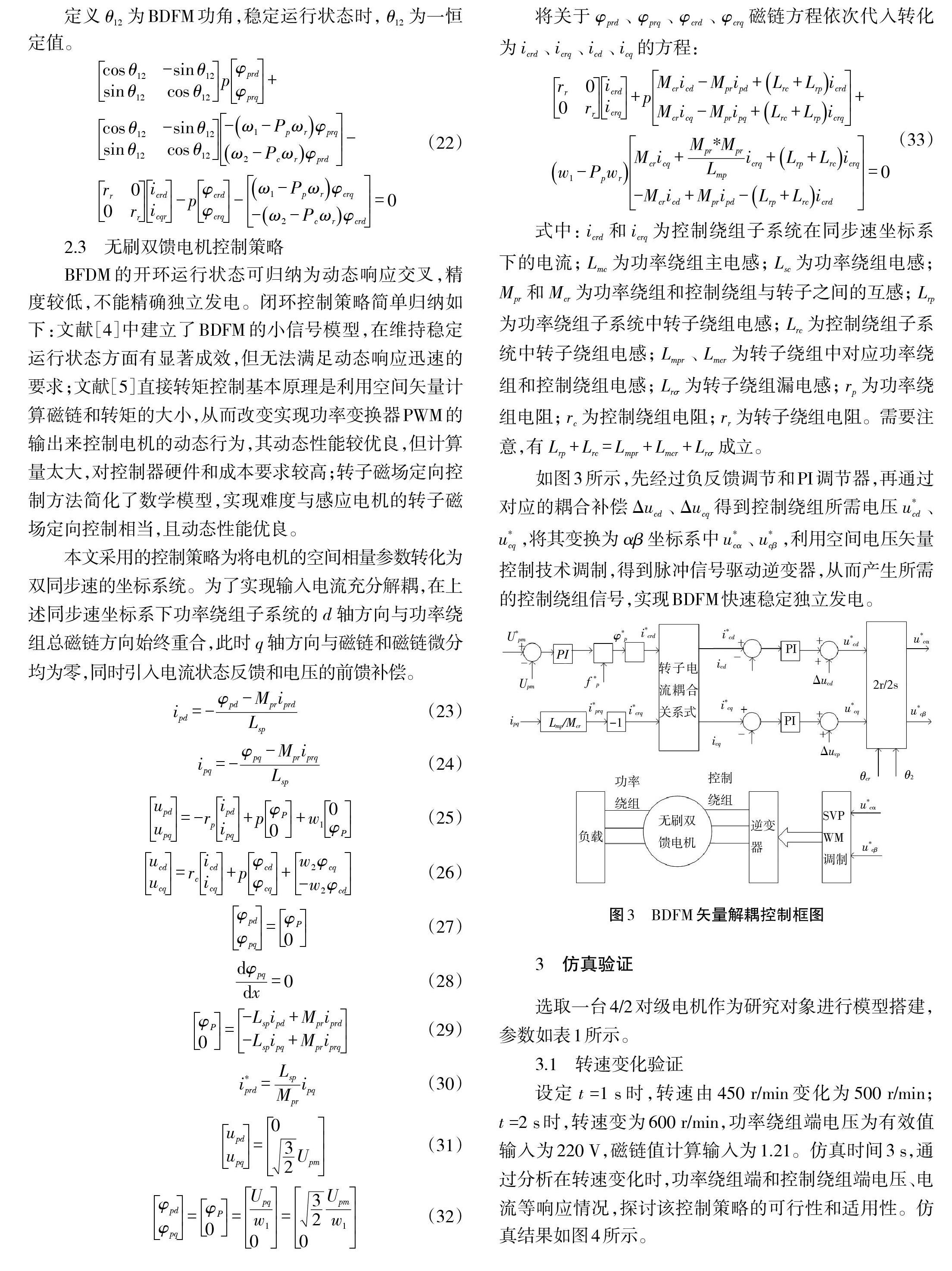
如图3所示,先经过负反馈调节和PI调节器,再通过对应的耦合补偿[Δucd]、[Δucq]得到控制绕组所需电压[u*cd]、[u*cq],将其变换为[αβ]坐标系中[u*cα]、[u*cβ],利用空间电压矢量控制技术调制,得到脉冲信号驱动逆变器,从而产生所需的控制绕组信号,实现BDFM快速稳定独立发电。
3 仿真验证
选取一台4/2对级电机作为研究对象进行模型搭建,参数如表1所示。
3.1 转速变化验证
设定[t]=1 s时,转速由450 r/min变化为500 r/min;[t]=2 s时,转速变为600 r/min,功率绕组端电压为有效值输入为220 V,磁链值计算输入为1.21。仿真时间3 s,通过分析在转速变化时,功率绕组端和控制绕组端电压、电流等响应情况,探讨该控制策略的可行性和适用性。仿真结果如图4所示。
在转速连续变化过程中,[i*d]和[i*q]均为直流量,功率绕组端电压和频率迅速响应并趋于稳定,表明此控制策略能很好地实现在转速突变时BDFM的变速恒频恒压发电。
3.2 负载变化验证
保持转速500 r/min不变,设定[t]=2 s时投入负载,观察功率绕组端电压频率和控制绕组端电流的响应情况,结果如图5所示。
当[t]=2 s负载投入后,功率绕组侧三相电压频率和幅值不變,功率绕组电流随负载增大而增大,表明此控制策略动态性能优良,能很好地实现在负载变化时变速恒频恒压发电。
由上述转速变化和负载变化的仿真验证可知,在不同干扰下该控制策略均可实现功率绕组端电压幅值和频率的稳定,可最大限度地提高发电效率。
4 结论
针对BDFM各空间相量交叉耦合的特点,提出了一种在双同步速坐标系下磁场定向的控制策略,给出了详细的理论推导计算。在两相坐标系中电压电流磁链等空间相量可转变为直流量,简化了运动方程,降低了控制成本,实现了控制目标。仿真结果表明,在转速变化和负载变化的情况下,功率绕组电压控制绕组电压和频率均能够快速达到稳定,实现独立稳定发电,表明所提出的控制策略具有良好的动态性能,成效显著。
参考文献:
[1]杨俊华.无刷双馈风力发电系统及其控制研究[D].广州:华南理工大学,2006:2-6.
[2]吴涛,王雪帆,李勇波.绕线式转子无刷双馈电机单机发电控制研究[J].电气传动自动化,2012(6):1-5.
[3]邓先明.无刷双馈电机的电磁分析与设计应用[M].北京:机械工业出版社,2009:223.
[4]HASHEMNIA M N,TAHAMI F.An improved dynamic model for simulation and stability analysis of brushless doubly fed machines[C]//European Conference on Power Electronics and Applications,2016.
[5]段琦玮.无刷双馈电机解耦补偿控制策略[J].科技创新与应用,2020(25):65-66.
