基于自适应基准锁相环的高速永磁电机转子位置误差全补偿方法
2021-10-30 06:36王晓琳刘思豪
电工技术学报 2021年20期
王晓琳 刘思豪 顾 聪
基于自适应基准锁相环的高速永磁电机转子位置误差全补偿方法
王晓琳 刘思豪 顾 聪
(南京航空航天大学自动化学院 南京 211106)
转子位置信息的精度影响高速永磁同步电机的运行性能,在高速运行条件下,转子位置估算容易受到环路滤波器和电机参数偏差等非理想因素的影响。首先,针对转子位置估算误差,该文提出一种自适应基准锁相环,主要思想是锁相环通过误差重构,实现对基频相关误差补偿。在此基础上,以最小电流为目标自适应调节锁相环的锁相基准,实现对非基频相关误差的补偿,最终实现对位置误差的全补偿,该方法实现简单、参数依赖性低、鲁棒性强。最后,基于一台高速永磁同步电机进行仿真与实验,结果验证了所提出方法的有效性。
高速永磁同步电机 转子磁链观测器 位置估算误差 锁相环
0 引言

在高速运行条件下,采用无位置传感器算法容易受到诸多非理想因素的影响,造成明显的转子位置估算误差。文献[16]为消除由于逆变器的非线性以及空间谐波所造成位置信号中存在6次脉动,提出一种基于自适应滤波的位置估算方法。文献[17-18]通过对电机参数在线辨识,提高位置估算的准确性,但电机参数辨识模型复杂,降低了系统的实时性。文献[19]为消除信号中谐波的影响,提出一种同步频率提取滤波器,能够直接提取出信号中的基波分量。文献[20]提出一种基于误差特征量的闭环位置误差补偿方法,根据转子位置误差在直轴上的特征分量对转子位置进行闭环调节,该方法实现简单,但是对电感参数有一定的依赖。文献[21]提出一种双重锁相环,在正交锁相环的基础上,对延迟重构信号进行二次锁相以补偿位置误差。文献[22-23]通过追踪最小电流以实现对位置误差的补偿,此方法实现简单且不依赖任何参数,鲁棒性强,但是容易导引起稳态时的电流抖振,影响系统的稳定性。
本文首先对高速运行条件下环路滤波器、电感参数偏差或电压电流采样偏差等非理想因素所造成的转子位置估算误差进行分析,并归纳为基频相关和非基频两种类型。为统一补偿各类位置估测误差,本文提出一种基于自适应基准锁相环的转子位置误差全补偿方法:一方面,对误差信号进行重构,并通过锁相环(Phase-Locked Loop, PLL)得到与基频相关误差的补偿值;另一方面,锁相环基准随最小电流目标值进行自适应实时调整,从而到达对非基频相关误差的补偿。最后,本文基于一台高速永磁同步电机进行仿真与实验,验证了所提出的转子位置估算误差全补偿方法的有效性。
1 转子磁链观测器及位置估算误差分析
1.1 转子磁链观测器原理

由于磁链观测器中存在纯积分环节,易受积分初值与直流分量的影响,因此,采用高通滤波器(High-Pass Filter, HPF)与纯积分环节串联。为消除高频谐波与干扰信号,还需在观测器的输入串联低通滤波器(Low-Pass Filter, LPF)。经上述改进后,转子磁链观测器的结构框图如图1所示。

图1 转子磁链观测器结构框图
1.2 转子位置估算误差分析
在高速电机驱动系统中,根据转子位置误差与基频的相关性定义为基频相关误差和非基频相关误差,下面对这两类误差进行具体分析。
1.2.1 基频相关误差

1.2.2 非基频相关误差

综上所述,采用转子磁链观测器估算转子位置时,环路滤波器和电感参数偏差均会造成一定的位置误差,其中,电感参数偏差等其他非理想因素所造成的位置误差无法准确定量,难以补偿。因此,探究有效的位置误差全补偿策略,是提升电机运行性能的关键所在。
2 一种位置估算误差全补偿方法
本文所提出的转子位置估算误差全补偿方法主要包括锁相环和锁相基准自适应调整两部分,下面分别对这两部进行分析。
2.1 基于锁相环的转子位置估算误差补偿


图3 锁相环位置补偿原理
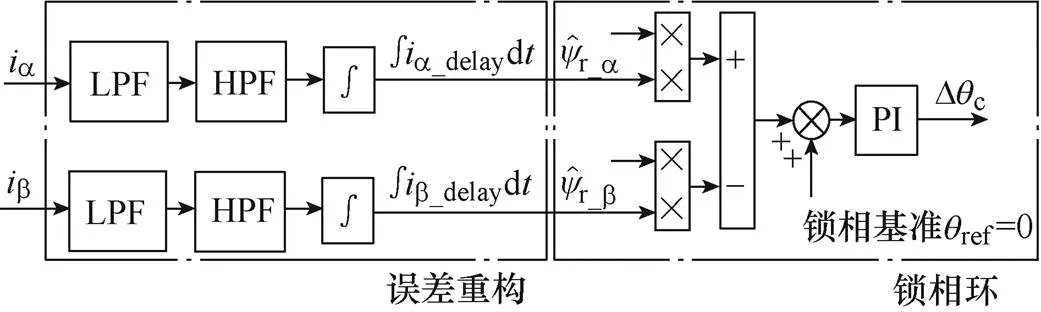
图4 锁相环位置误差补偿框图
2.2 锁相基准自适应调整

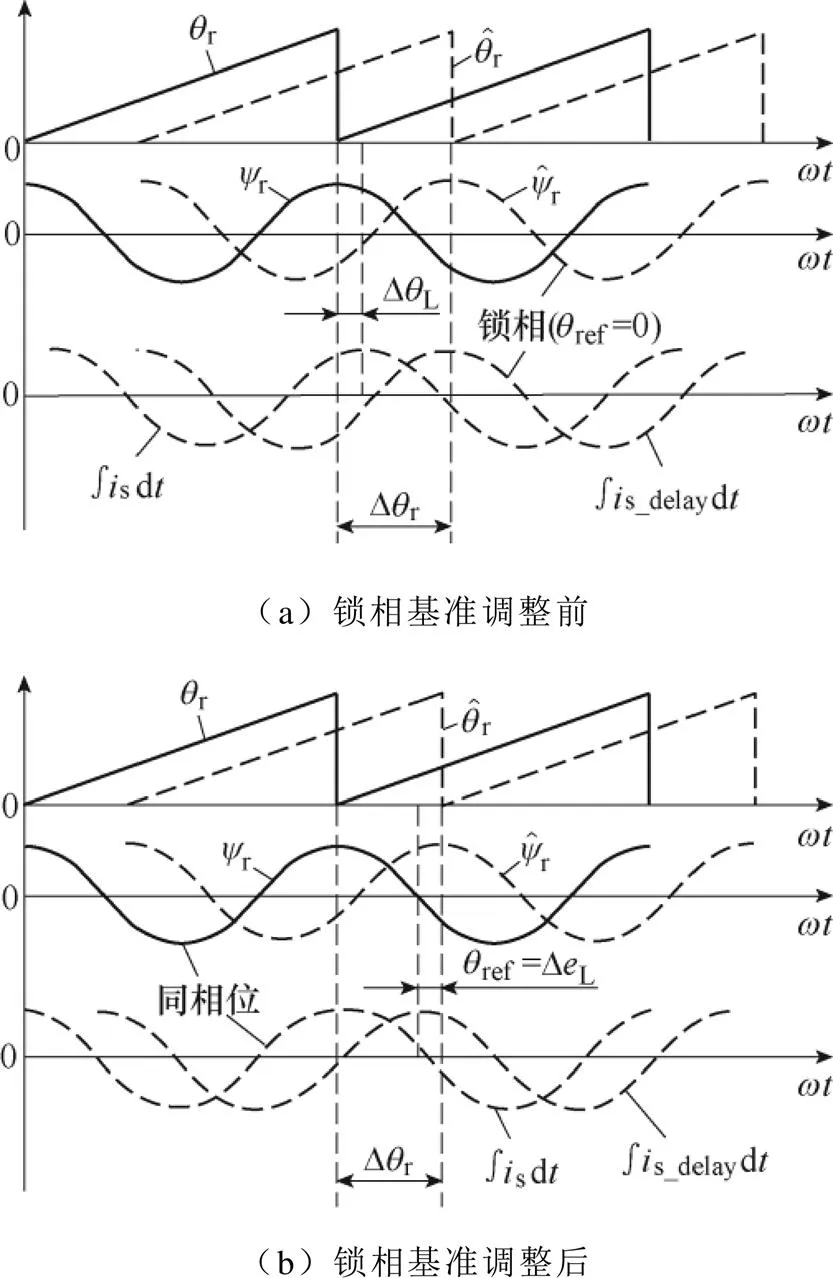
图5 锁相基准调整

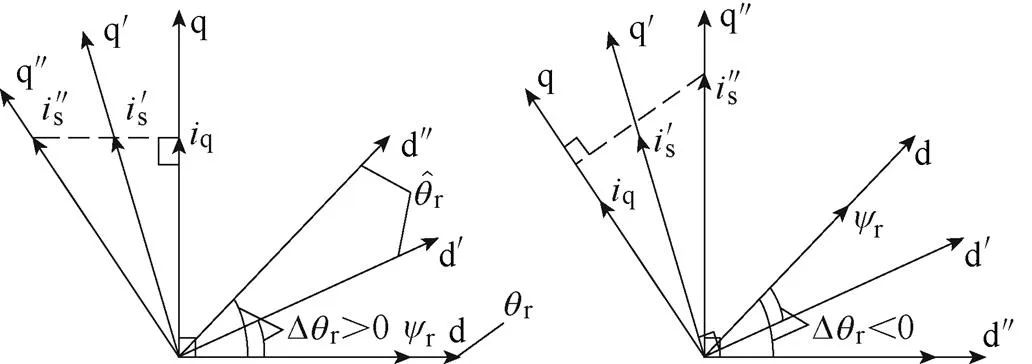
图6 电流与位置误差的关系



图8 基于自适应基准锁相环转子位置估计器结构
3 仿真与实验验证
为充分验证本文所提出的转子位置估算误差全补偿方法的有效性,本文基于一台高速永磁同步电机进行仿真和实验验证,样机主要参数见表1。
表1 样机主要参数
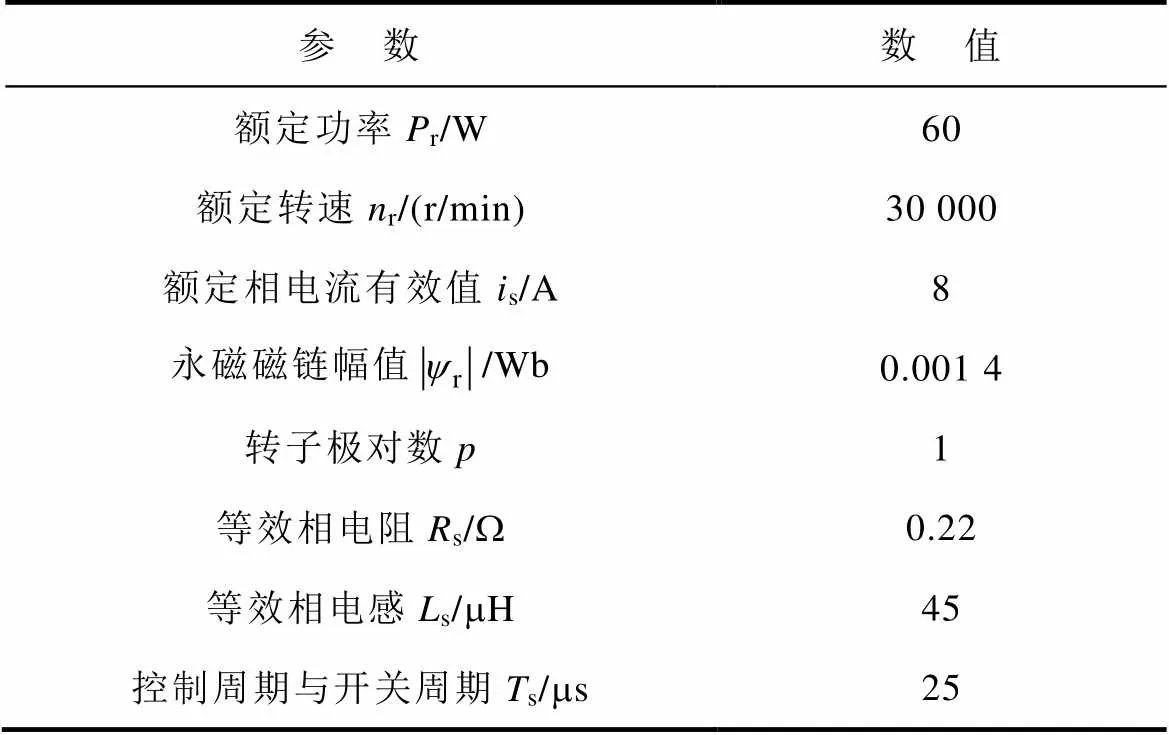
Tab.1 The main parameters of the motor
3.1 仿真验证
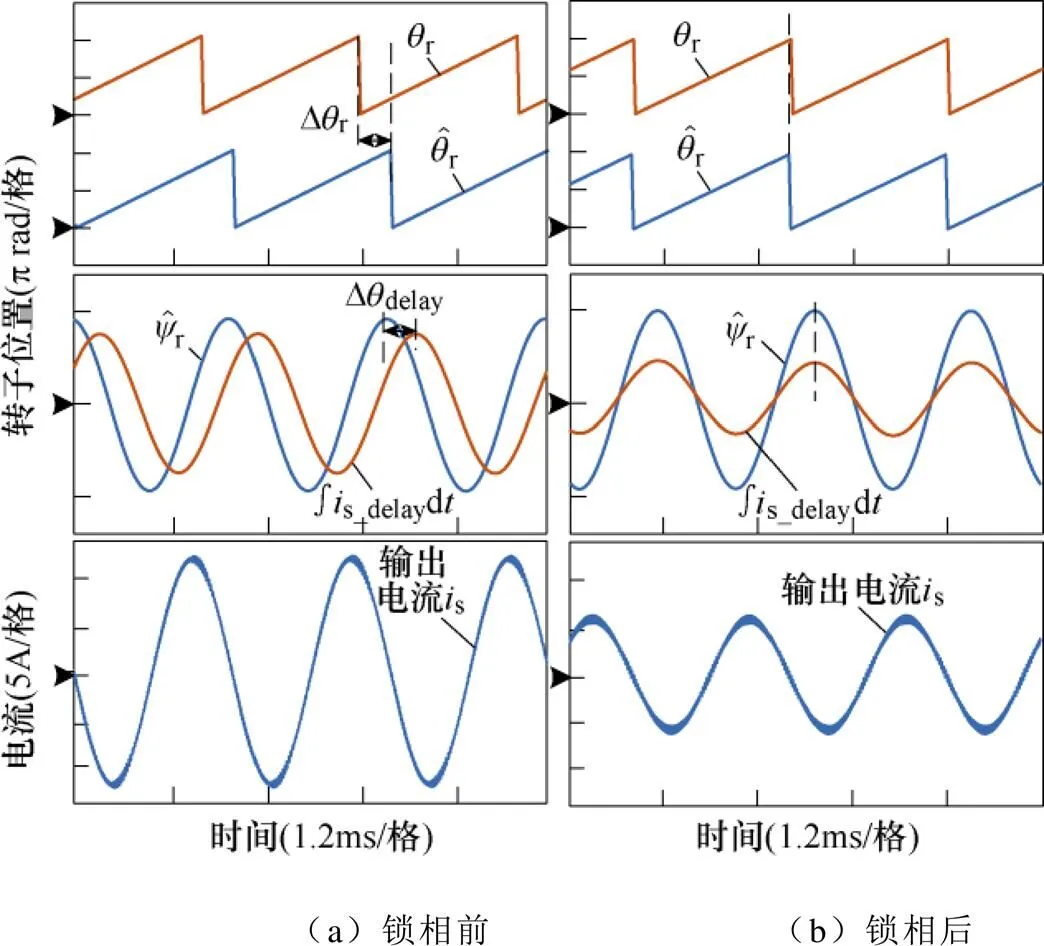
图9 基于锁相环仿真结果(锁相基准为0)
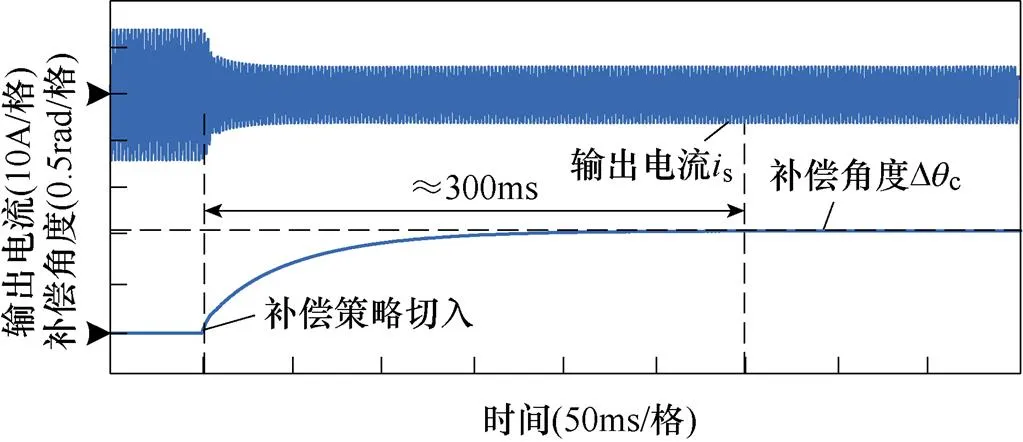
图10 锁相环的动态响应性能

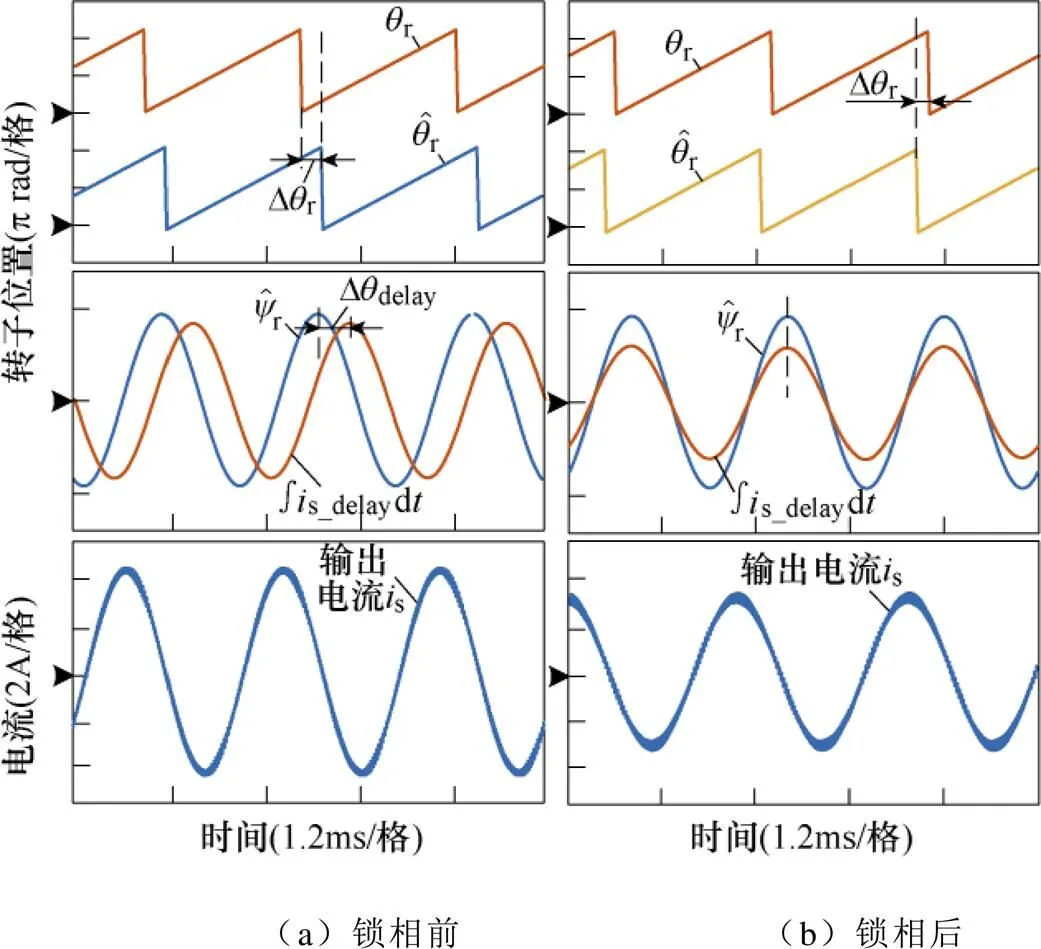
图11 考虑时锁相环仿真结果(锁相基准为0)
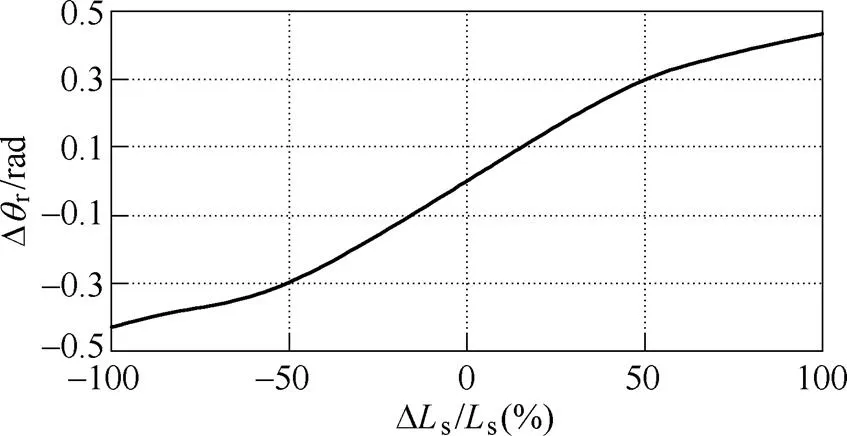
图12 不同程度所造成的位置误差

图13 基于自适应锁相基准锁相环仿真结果
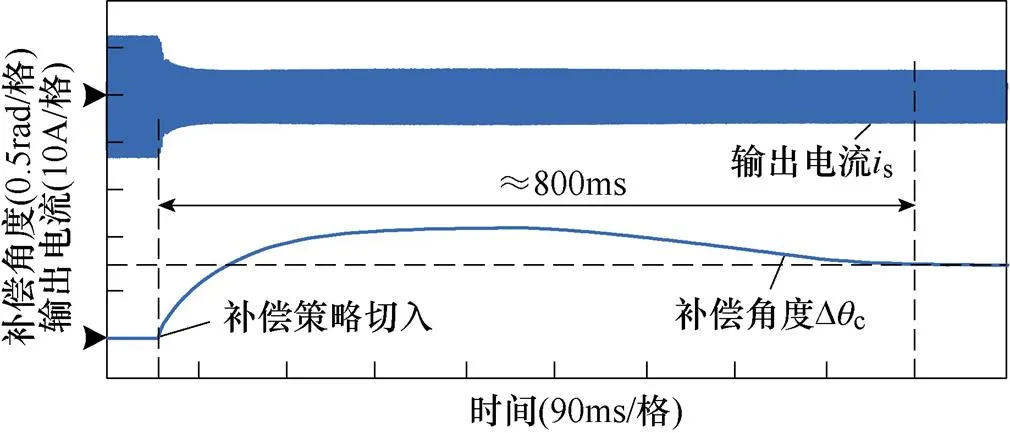
图14 自适应基准锁相环动态响应性能

3.2 实验验证
为验证自适应基准锁相环的有效性,本文搭建基于TMS320F28377D和GaNFET功率器件的高速驱动平台,相应电机与驱动平台如图16所示,该电机带叶轮负载。


图15 负载突变时自适应锁相基准锁相环仿真结果
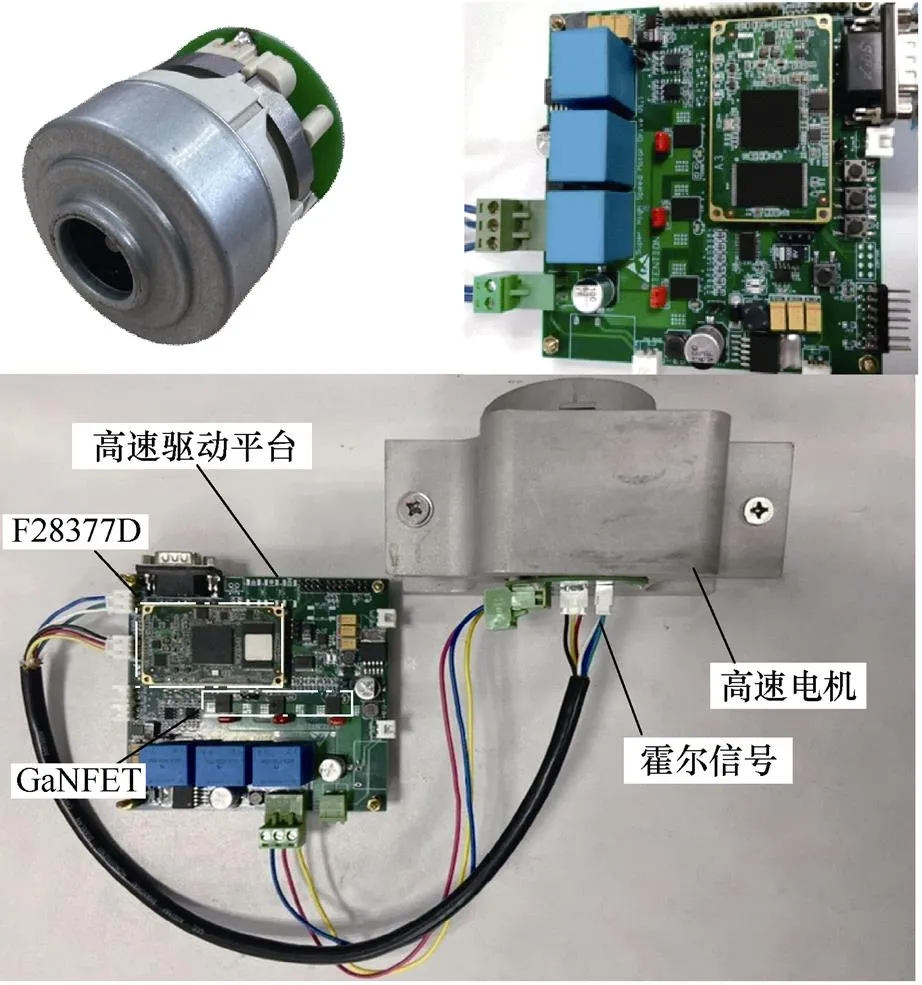
图16 高速永磁同步电机与驱动平台
图18所示为锁相环补偿算法切入瞬间的动态响应实验结果,可以看出,电流减小到最小值后,又稍微增大,体现出单独采用锁相环补偿位置误差时,会造成“过补偿”。
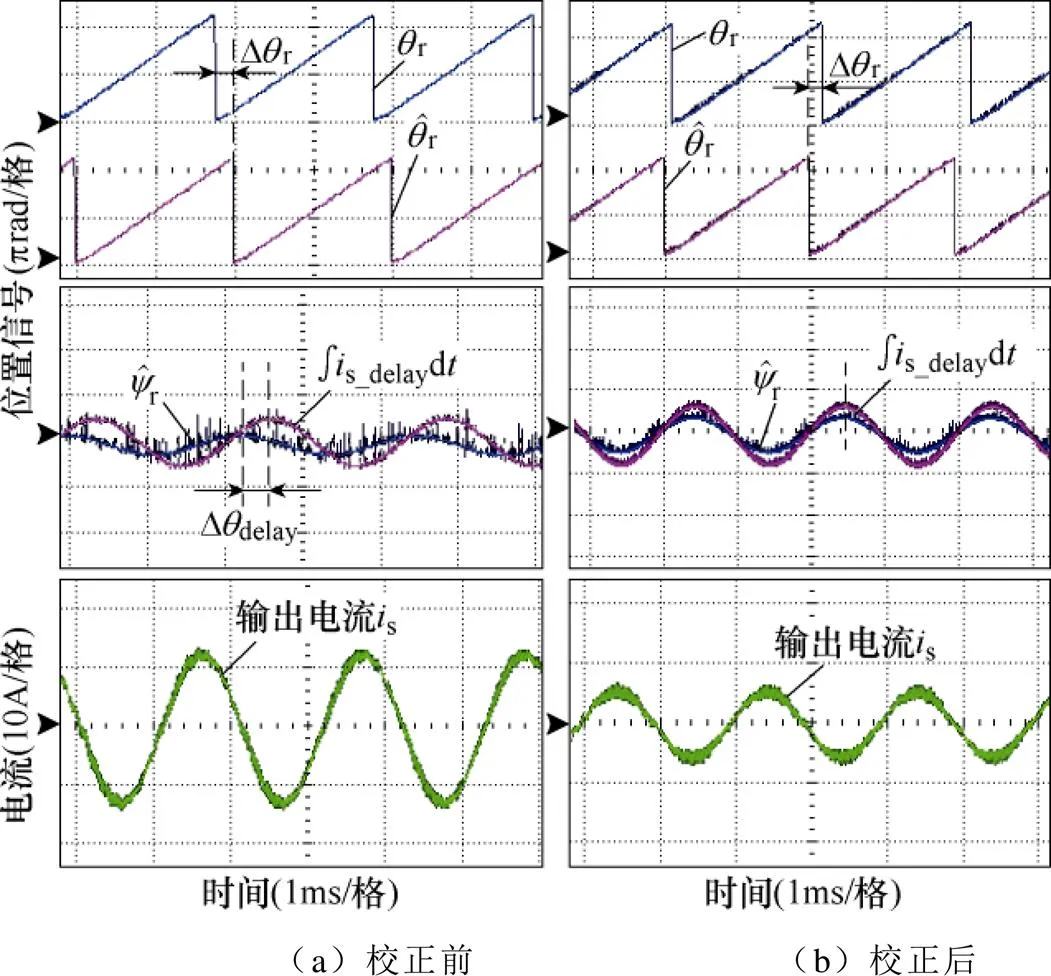
图17 基于锁相环的实验结果(锁相基准为0)
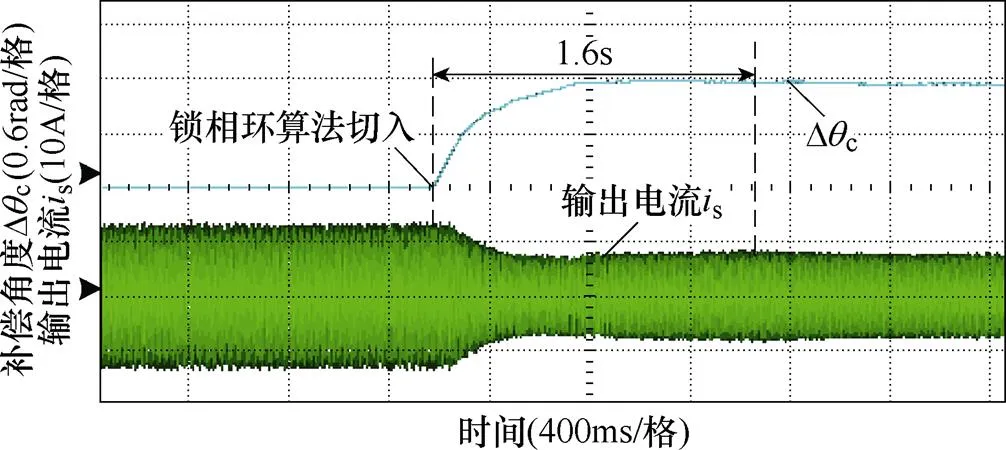
图18 锁相环动态响应性能
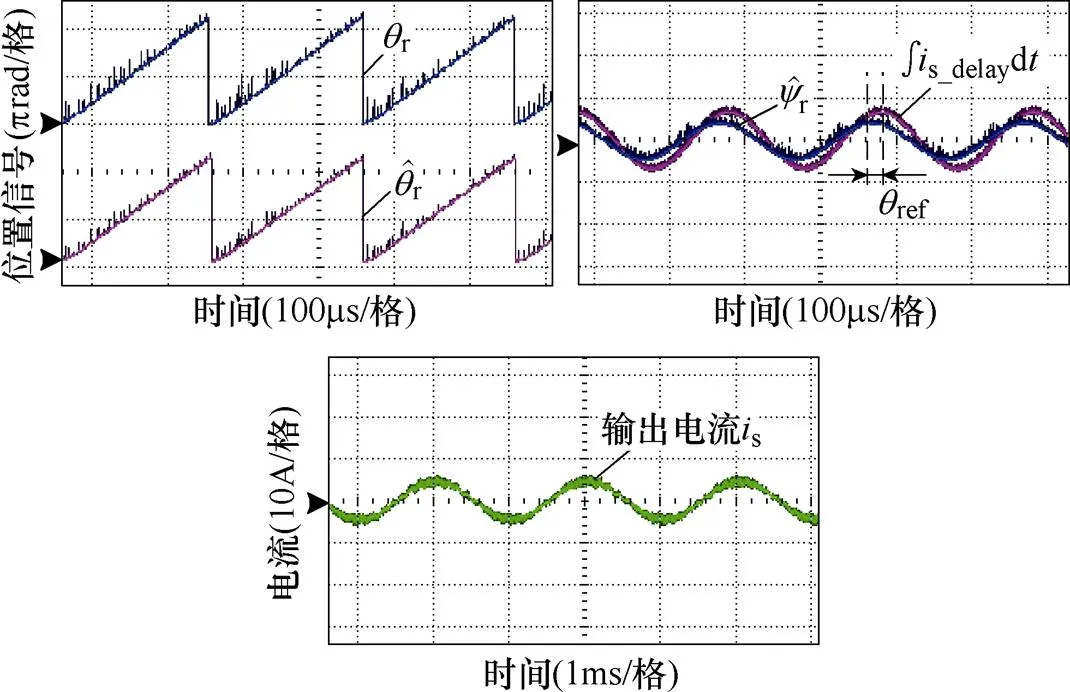
图19 基于自适应基准锁相环的补偿效果
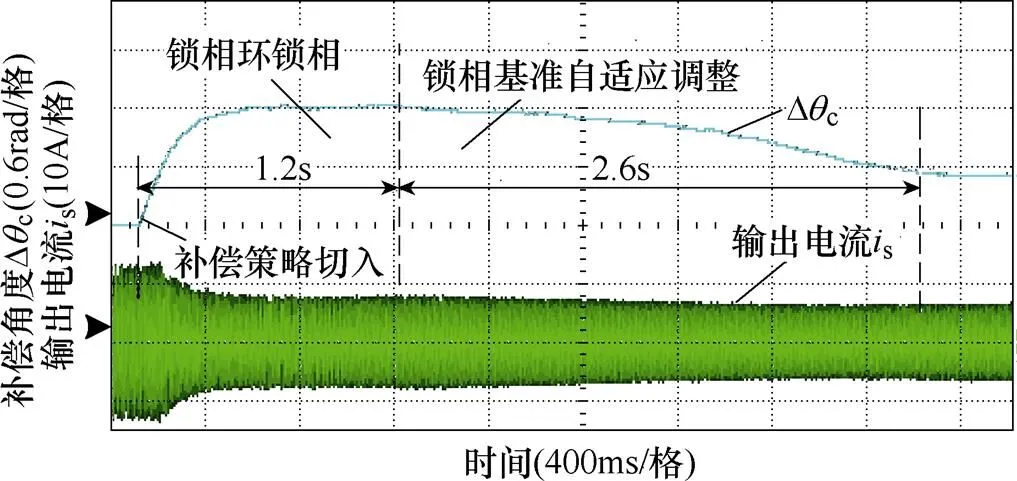
图20 自适应基准PLL动态响应性能
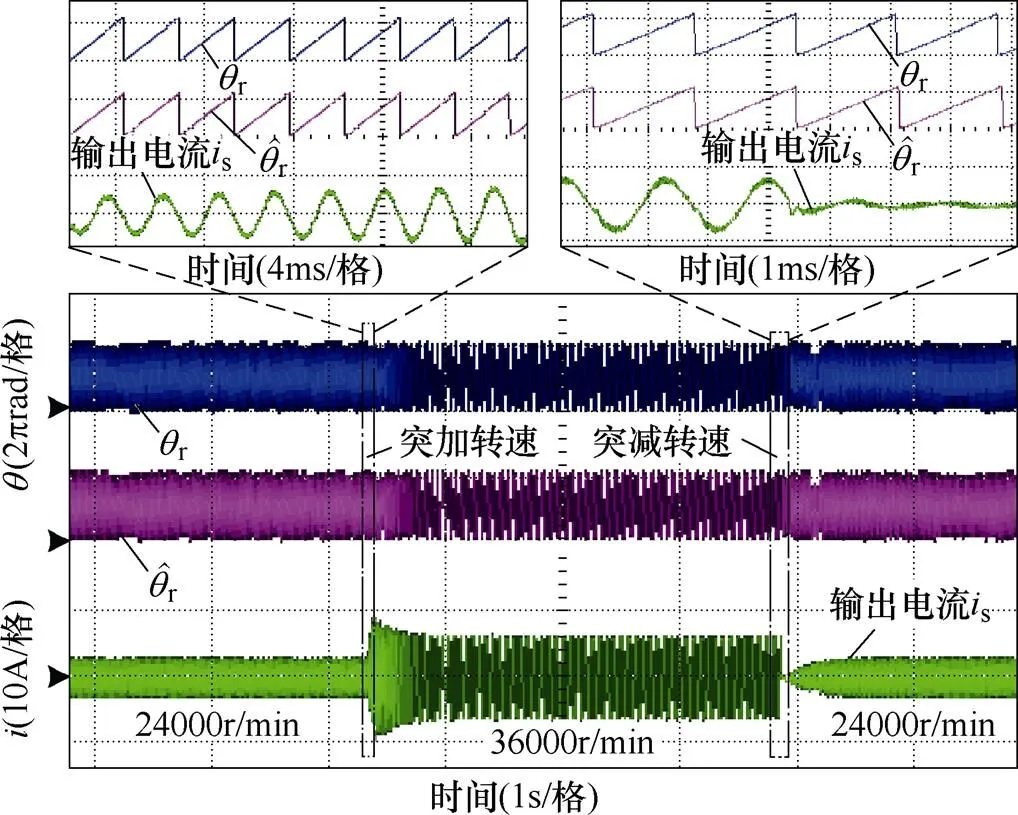
图21 自适应基准锁相环动态性能实验结果
综上所述,本文通过较为全面的仿真和实验结果对比分析,验证了所提出的自适应基准锁相环的有效性。
4 结论
本文提出了一种适用于高速永磁同步电机的转子位置估算误差全补偿方法,能够实现对环路滤波器和电感参数偏差所造成误差的补偿,所提出方法的优势在于:
1)无需对位置估算误差准确定量,即可实现对位置估算误差的全补偿。
2)补偿算法中未引入敏感参数,具有一定的鲁棒性。
3)该方法与转子磁链观测器相配合,在电感参数误差为100%的情况下,能够准确地估计转子位置,提高了转子磁链观测器的适用性和鲁棒性。最后,通过仿真和实验,验证了本文所提出方法的有 效性。
[1] Hong D K, Woo B C, Lee J Y, et al. Ultra high speed motor supported by air foil bearings for air blower cooling fuel cells[J]. IEEE Transactions on Mag- netics, 2012, 48(2): 871-874.
[2] 孙权贵, 邓智泉, 张忠明. 基于齿槽效应的高速永磁电机转子涡流损耗解析计算[J]. 电工技术学报, 2018, 33(9): 1994-2004.
Sun Quangui, Deng Zhiquan, Zhang Zhongming. Analytical calculation of rotor eddy current losses in high speed permanent magnet machines accountiing for influence of slot opening[J]. Transactions of China Electrotechnical Society, 2018, 33(9): 1994- 2004.
[3] 张凤阁, 杜光辉, 王天煜, 等. 高速电机发展与设计综述[J]. 电工技术学报, 2016, 31(7): 1-18.
Zhang Fengge, Du Guanghui, Wang Tianyu, et al. Review on development and design of high speed machines[J]. Transactions of China Electrotechnical Society, 2016, 31(7): 1-18.
[4] 戴兴建, 姜新建, 王秋楠, 等. 1MW/60MJ飞轮储能系统设计与实验研究[J]. 电工技术学报, 2017, 32(21): 169-175.
Dai Xingjian, Jiang Xinjian, Wang Qiunan, et al. Design and experimental study of 1MW/60MJ flywheel energy storage system[J]. Transactions of China Electrotechnical Society, 2017, 32(21): 169- 175.
[5] 戈宝军, 罗前通, 王立坤, 等. 高速永磁同步电动机铁耗分析[J]. 电机与控制学报, 2020, 24(4): 32-39.
Ge Baojun, Luo Qiantong, Wang Likun. Analysis of iron losses of high speed permanent magnet syn- chronous motor[J]. Electric Machines and Control, 2020, 24(4): 32-39.
[6] 刘计龙, 肖飞, 沈洋, 等. 永磁同步电机无位置传感器控制技术研究综述[J]. 电工技术学报, 2017, 32(16): 76-88.
Liu Jilong, Xiao Fei, Shen Yang, et al. Review of sensorless control technology of permanent magnet synchronous motor[J]. Transactions of China Electro- technical Society, 2017, 32(16): 76-88.
[7] 谷善茂, 何凤有, 谭国俊, 等. 永磁同步电动机无传感器控制技术现状与发展[J]. 电工技术学报, 2009, 24(11): 15-20.
Gu Shanmao, He Fengyou, Tan Guojun, et al. A review of sensorless control technology of permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2009, 24(11): 15-20.
[8] 李永东, 朱昊. 永磁同步电机无速度传感器控制综述[J]. 电气传动, 2009, 39(9): 3-10.
Li Yongdong, Zhu Hao. Overview of sensorless control of permanent magnet synchronous motors[J]. Electric Drive, 2009, 39(9): 3-10.
[9] Wu Chao, Sun Xiangdong, Wang Jianyuan. A rotor flux observer of permanent magnet synchronous motors with adaptive flux compensation[J]. IEEE Transactions on Energy Conversion, 2019, 34(99): 2106-2117.
[10] 王子辉. 永磁同步电机全速度范围无位置传感器控制策略研究[D]. 杭州: 浙江大学, 2012.
[11] 钟臻峰, 金孟加, 沈建新. 基于分段PI调节器的模型参考自适应永磁同步电动机全转速范围无传感器控制[J]. 中国电机工程学报, 2018, 38(4): 1203- 1211.
Zhong Zhenfeng, Jin Mengjia, Shen Jianxin. Full speed range sensorless control of permanent magnet synchronous motor with phased PI regulator-based model reference adaptive system[J]. Proceedings of the CSEE, 2018, 38(4): 1203-1211.
[12] Kim H, Son J B, Lee J Y. A high-speed sliding-mode observer for the sensor-less speed control of PMSM[J]. IEEE Transactions on Industry Electronics, 2011, 47(3): 1337-1343.
[13] 尹忠刚, 张瑞峰, 钟彦儒, 等. 基于抗差扩展卡尔曼滤波器的永磁同步电机转速估计策略[J]. 控制理论与应用, 2012, 29(7): 921-927.
Yin Zhonggang, Zhang Ruifeng, Zhong Yanru, et al. Speed estimation for permanent magnet synchronous motor based on robust extended Kalman filter[J]. Control Theory & Applications, 2012, 29(7): 921- 927.
[14] 薛哗, 魏佳丹, 周波. 三级式同步电机低速阶段无位置传感器起动控制高频信号注入法的对比[J]. 电工技术学报, 2018, 33(12): 2703-2712.
Xu Hua, Wei Jiadan, Zhou Bo. Comparative investigation on sensorless control of three-stage synchronous motor based on high-frequency injection method at low speed[J]. Transactions of China Electrotechnical Society, 2018, 33(12): 2703-2712.
[15] 刘颖, 周波, 冯瑛, 等. 永磁同步电机低速无传感器控制及位置估计误差补偿[J]. 电工技术学报, 2012, 27(11): 38-45.
Liu Ying, Zhou Bo, Feng Ying, et al. Sensorless control of SPMSM based on high frequency current signal injection in the direct axis at low and zero speed[J]. Transactions of China Electrotechnical Society, 2012, 27(11): 38-45.
[16] 王辉, 潘文丽, 吴轩. 一种自适应滤波的永磁同步电机转子位置估算方法[J]. 电机与控制学报, 2019, 23(11): 51-59.
Wang Hui, Pan Wenli, Wu Xuan. Position estimation method of permanent magnet synchronous motor based on adaptive filter[J]. Electric Machines and Control, 2019, 23(11): 51-59.
[17] 李旭春, 张鹏, 严乐阳, 等. 具有参数辨识的永磁同步电机无位置传感器控制[J]. 电工技术学报, 2016, 31(14): 139-147.
Li Xuchun, Zhang Peng, Yan Leyang, et al. Sensor- less control of permanent magnet synchronous motor with online parameter identification[J]. Transactions of China Electrotechnical Society, 2016, 31(14): 139- 147.
[18] Song Xinda, Fang Jiancheng, Han Bangcheng, et al. Adaptive compensation method for high-speed surface PMSM sensorless drives of EMF-based position estimation error[J]. IEEE Transactions on Power Electronics, 2016, 31(2): 1438-1449.
[19] 年珩, 李嘉文, 万中奇. 基于参数在线辨识的永磁风力发电机无位置传感器控制技术[J]. 中国电机工程学报, 2012, 32(12): 146-154.
Nian Heng, Li Jiawen, Wan Zhongqi. Sensorless control technique of PMSG for wind power appli- cation based on on-line parameter identification[J]. Proceedings of the CSEE, 2012, 32(12): 146-154.
[20] 黄科元, 高丽真, 黄守道. 基于电流环误差修正的高速永磁同步电机转子位置校正方法[J]. 中国电机工程学报, 2017, 37(8): 241-249.
Huang Keyuan, Gao Lizhen, Huang Shoudao. A correction method of rotor positions for high speed permanent magnet synchronous motor based on the error correction of the current loop[J]. Proceedings of CSEE, 2017, 37(8): 241-249.
[21] 顾聪, 王晓琳, 邓智泉. 一种基于双重锁相环的高速永磁同步电机转子位置估计误差全补偿方法[J]. 中国电机工程学报, 2020, 40(3): 962-970.
Gu Cong, Wang Xiaolin, Dang Zhiquan. A rotor position estimated error correction method for high- speed permanent magnet synchronous motor Based on dual-phase-locked-loop[J]. Proceedings of the CSEE, 2020, 40(3): 962-970.
[22] 施晓青, 王晓琳, 徐同兴, 等. 高速无刷直流电机自寻优换相校正策略[J]. 电工技术学报, 2019, 34(19): 3997-4005.
Shi Xiaoqing, Wang Xiaolin, Xu Tongxing, et al. Self-optimization commutation correction strategy for high-speed brushless DC motor[J]. Transactions of China Electrotechnical Society, 2019, 34(19): 3997-4005.
[23] Gu Cong, Wang Xiaolin, Zhang Feilong, et al. Correction of rotor position estimation error for high- speed permanent magnet synchronous motor sensor- less drive system based on minimum-current-tracking method[J]. IEEE Transactions on Industrial Electro- nics, 2020, 67(10): 8271-8280.
A Rotor Position Error Compensation Algorithm for High-Speed Permanent Magnet Motor Based on Phase-Locked Loop with Adaptive Reference
(College of Automation Engineering Nanjing University of Aeronautics and Astronautics Nanjing 211106 China)
The accuracy of rotor position information affects the performance of high-speed permanent magnet synchronous motor (HSPMSM). The rotor position estimation is vulnerable to some non-ideal factors at high speed, such as the filters and the deviations of motor parameters. In this paper, a phase-locked loop with adaptive phase-locked reference is proposed to eliminate the rotor position error. The main idea of the proposed method is that the position error related to the fundamental frequency is compensated by reconstructing the position error with phase-locked loop (PLL). The reference of phase-locked loop is adjusted adaptively to minimize the current and compensate the position error of non-fundamental frequency. In this way, the position error is fully compensated. The proposed method has the advantages of simple implementation, low parameter-dependence and strong robustness. Finally, simulations and experiments were conducted on a HSPMSM, and the results verified the effectiveness of the proposed method.
High-speed permanent magnet synchronous motor(HSPMSM), rotor flux observer, position estimated error, phase-locked loop
10.19595/j.cnki.1000-6753.tces.200658
TM351
王晓琳 男,1976年生,教授,研究方向为永磁电机、无轴承电机,高速电机的驱动和控制。E-mail: wangxl@nuaa.edu.cn(通信作者)
刘思豪 男,1994年生,硕士研究生,研究方向为高速永磁电机控制。E-mail: 1354489565@qq.com
2020-06-16
2020-08-01
国家自然科学基金(5217070613)和江苏省自然科学基金(BK20201297)资助项目。
(编辑 崔文静)
猜你喜欢
中国人民公安大学学报(自然科学版)(2022年1期)2022-07-20
新疆大学学报(自然科学版)(中英文)(2022年2期)2022-03-27
防爆电机(2020年6期)2020-12-14
山东交通科技(2020年2期)2020-08-13
电子制作(2017年20期)2017-04-26
光学精密工程(2016年3期)2016-11-07
电测与仪表(2016年5期)2016-04-22
电测与仪表(2015年9期)2015-04-09
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年8期)2014-04-04