
低空无人机航测在大比例尺地形测绘中的应用研究
2021-10-27 09:20:28*郭龙
当代化工研究 2021年19期
*郭 龙
(晋城泽祥勘探测绘有限公司 山西 048006)
在进行矿山开采或者矿山地质环境恢复治理时,必须要以精准的现场大比例尺地形测绘图为基础,但是在传统的测绘工作开展过程中,测绘人员通常采用单机站或者网络PTK的方式进行实测,这种测绘方式不仅效率低、作业周期长,而且难以保证测量精度。现如今随着科学技术的突飞猛进,低空无人机航测技术应用在矿山大比例尺地形测绘中取得了显著效果,可以妥善应对复杂的矿山地形。
1.低空无人机航测系统的应用优势和不足分析
(1)应用优势。应用低空无人机航测技术测绘矿山大比例尺地形图时,有以下几点显著的应用优势:首先,具有更强的便利性。因为低空无人机航测系统具有较小的单位体积并且集成度更高,可以用普通车辆进行运输,并且对起飞和降落的场地没有过高要求,作业环境友好,不会对周边环境带来不利影响;其次,具有更低的成本。在使用传统测绘技术测量复杂的矿山地形时,需要花费大量的人力和物力成本,而且测量周期长、测量精度难以保证,低空无人机航测技术可有效解决这一弊端,极大程度的降低测绘成本、提高测绘精度;再次,具有更加完善的功能。低空无人机航测系统可以同时兼容气象传感器与热成像仪,因此不仅能够测量地形地貌等地质特征,还能够对土地的利用情况进行动态监测,功能更加完善和突出;最后,具有更高的灵活性。低空无人机体积小巧、易于携带,并且在测绘过程中能够灵活调节飞行速度,而且操作流程简单,工作人员可独立完成测绘任务。
(2)应用不足。虽然低空无人机具有突出的航测优点,但是毕竟是一种新兴技术,在应用过程中存在着一些不足之处。例如,在现有的技术条件下,工作人员尚无法克服外界因素影响保证无人机的稳定性,所以拍摄的图片会存在着重叠度过大、重叠度不规则、特征匹配难度大等问题。
2.低空无人机航测的数据采集和处理
(1)现有地形图数据采集方式。图1是低空无人机的摄影测量数据处理流程。在低空无人机航测中最常用的数据采集方式为摄影测量工作站立体观测,通俗的说就是在空中三角测量工作完成以后,工作人员需要以测量数据为基础对模型进行仿真处理,然后结合地形地貌等要素进行数据采集,必要时需要进行补测和调绘等工作。但是此种数据采集方式效率低、工作量大。
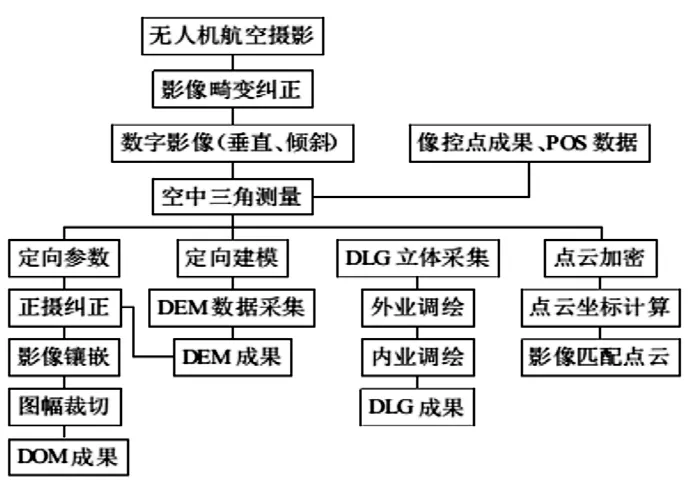
图1 无人机摄影测量数据处理流程
(2)影像点云地形图数据采集方式。随着影像匹配算法的日渐成熟,影像点云地形图的数据日渐精准且数量庞大,所以影像点云数据为地形数据采集提供了便利条件。影像点云地形图数据采集主要是利用点云处理软件,其中激光点云数据软件应用相对广泛。处理流程如图2所示。
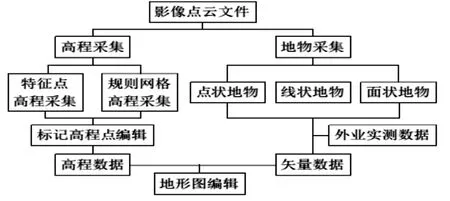
图2 影像点云地形数据采集流程
因为影像匹配的点云数据是离散分布的三维数据,并且通过影像匹配获取同名点,因为匹配点具有唯一性,所以在同一个坐标系中同名点唯一存在。影像匹配点云数据包含着大量的语义信息和文理信息,并且此种匹配方法基于特征进行匹配,具体包括道路、建筑边缘、断裂线等边缘信息,其他技术很难实现。除此之外,此种数据采集方式在匹配影像时,可以充分利用自身拥有的目标光谱信息RGB值,方便后续的点云数据处理。
(3)调绘补测与数字化成图。南方CASS9.1是业内最常用的数字化成图编辑软件,主要依靠三维点云数据完成数据采集。如果一些影像无法精准判断地物特征,则需要在现场进行补测,在QT Modeler软件打开点云数据后可完成地形图的高程点提取,如果发现地形出现较大变化,存在陡崖或者悬坡时,工作人员就可以适当增加高程点密度用来保证测量的精准度。如果被测区域被森林覆盖,那么高程点在经过现场测量后还需要进行内业补充,最大程度的保证测量准确,然后即可将提取到的高程点输入到南方CASS9.1编辑软件中生成等高线,经过后续内业数字化成图即可。
(4)外业检查点精度分析。为评价低空无人机摄影测量精度,工作人员需要对成果质量进行补测抽查。假设利用PTK测量的坐标值为真实值,所以可以用相对均方根误差RMSE和平均误差Mmean两个指标来验证无人机航测值的离散程度和精度,公式如下:

其中,n代表像控点数量,Xi代表无人机航测值,Yi代表地面实测值。
3.低空无人机在矿山大比例尺地形测绘中的实际应用
(1)工程概况
山西沁东能源有限公司东大矿井位于晋东煤炭基地晋城矿区沁水县郑庄镇境内;井田范围117.2441km2,设计生产能力500万吨/年,隶属沁水县郑庄镇、端氏镇管辖。其地理位置为东经112°21′34″-112°31′04″,北纬35°40′32″-35°49′49″。根据中华人民共和国国土资源部2018年2月12日颁发的采矿许可证,矿区范围由6个坐标点的连线圈定,井田呈不规则六方形,长约13km,宽约9km,面积117.2441km2;开采深度140m至-280m标高。本井田位于太行山脉南端,山西省南部。地表总的趋势为北高南底,最高点位于井田北端的阎家掌附近,高程+1081m,最低点位于井田南端沁河河床上槐庄附近,高程+566.2m,相对高差514.80m,属剥蚀强烈的中低山-低中山区,区内沟谷纵横,多呈“V”字型、树枝状沟谷。本测区地物地貌较复杂,多山地,树林覆盖率达30%以上,地面起伏较大,最高处高程为950m,最低处高程为630m,最大高差超过300m,通行通视较困难。
(2)测区像控点和检查点的布置及测量
①像控点和检查点的选取及布置。像控点采用区域网布点方案,依据《低空数字航空摄影测量外业规范》(CH/Z 3004-2010)规定:区域网的图形宜呈矩形或方形;区域网的大小和像控点之间的跨度以能够满足空中三角测量精度要求为原则,主要依据成图精度、航摄资料的有关参数及对系统误差的处理等多因素确定。像控点和检查点应均匀分布和覆盖成图区域,在飞行前,根据成图范围和空三加密需要,选择像控点和检查点的位置、确定像控点和检查点的数量,本次共布设像控点和检查点共34个。
②像控点和检查点的施测。像控点和检查点坐标测量利用山西省连续运行基准网及综合服务系统(SXCORS),采用网络RTK控制点测量方法,观测时采用对中杆进行对中、整平,使用中海达iRTK5仪器采集像控点和检查点的平面和高程(WGS84坐标),像控点和检查点的外业采集精度误差控制在0.01m以内,满足精度要求。
(3)1:2000地形图编辑
本项目1:2000DLG数据采集采用MapMatrix 4.1航天远景摄影测量工作站进行数据采集。将空三加密成果导出为MapMatrix格式,启动MapMatrix导入加密成果,并自动建立立体像对。编辑软件使用南方CASS9.1进行地形图编辑,对原始采样数据进行粗差检查,以全数字测图系统采集的数据为依据,依照调绘成果,各作业员按图式和本设计书要求对数据进行整理及编辑。调绘资料采用的简化符号,成图改用正规符号。在本次航测中得到成图点位误差为0.7686m,高程误差为0.647m,满足1:2000地形图的精度要求。
(4)空中三角测量
①作业流程。首先,资料整理。根据航线接图表整理航摄影像,根据相片控制成果整理控制点成果,同时检查相机检校文件的完整性和一致性;其次,内定向。对数码像片,根据相机检校文件自动进行内定向,精度满足《规范》要求;再次,相对定向。数学精度指标:连接点上下视差中误差为2/3个像数,连接点上下视差最大残差为4/3个像数,能够满足1:2000地形图成图要求;最后,绝对定向。进行像控点刺点,刺点片数大于6张,所刺点位均匀分布于测区的中心和四周,并完整覆盖整个测区。
②空中三角测量检查。检查参数设定正确,点位选刺符合要求,相对定向结果满足精度要求,绝对定向后,检查基本定向点残差、检查点误差、公共点较差在精度范围内,空三测量成果符合《低空数字航空摄影测量内业规范》(CH/Z 3003-2010)要求。
4.结论
综上所述,将低空无人机航测技术应用在矿山大比例尺地形测绘中,可以极大程度的提高测绘精度并且降低测绘成本,因此我国相关部门也投入大量精力对无人机航测技术进行深入研究,希望可以进一步提高无人机航测的稳定性,进一步扩展无人机的测绘领域,以此来推动我国测绘事业的长远发展。
猜你喜欢
计算机系统应用(2022年4期)2022-05-10 08:41:10
天津医科大学学报(2021年4期)2021-08-21 02:14:52
当代陕西(2020年23期)2021-01-07 09:24:44
国际呼吸杂志(2019年4期)2019-03-12 01:08:18
北京航空航天大学学报(2017年9期)2017-12-18 07:12:31
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
南方文学(2016年3期)2016-06-12 13:54:34
中国房地产业(2016年8期)2016-03-01 01:26:16
兵器知识(2016年2期)2016-01-29 16:45:07
现代计算机(2015年31期)2015-09-28 05:31:51
