
双向DC/DC变换器鲁棒滑模控制
2021-10-27 09:01邹浩彦
物联网技术 2021年10期
李 博,邹浩彦
(1.中国航空工业集团公司第一飞机设计研究院,陕西 西安 710089;2.空装驻西安地区第一军事代表室,陕西 西安 710089)
0 引 言
随着国家倡导开发可再生的绿色清洁能源,太阳能、风能等[1]在发电系统中的应用得到了大力提倡与发展。但其自身存在随机性和不可预测性,且容易随着环境而产生较大的波动,因此需要采用电力储能技术经电力电子变换后,向负载提供能量。
近几年,在电力电子技术应用领域中,开关型DC/DC变换器以其高可靠性,高转换效率以及较小体积等优点获得了工业、军事、计算机控制系统、不间断电源、汽车制造业、国防航天、无线通信和电子变频器等领域的青睐[2]。特别是电力电子变换技术越发成熟,双向DC/DC变换器已被广泛应用于需要能量双向流动的场合。由于负载的多样性与工作环境的不确定性,对变换器造成的各种扰动使得输出电压产生波动,不利于负载的稳定运行。因此,寻找合适的控制策略以保证系统参数的不敏感性与高可靠性,以确保系统稳定运行。白立鹏[3]采用PID控制与滑模控制相结合的方法,实现双向DC/DC变换器在电源或负载变化下输出电压的稳定控制。文献[4]根据双向DC/DC变换器CCM和DCM模式下的电路特性,提出了一种结合滞环控制的滑模控制方法,并通过实验验证了Buck模式下的鲁棒性与快速性。文献[5]基于高阶滑模控制实现了Buck-Boost变换器在大扰动下的鲁棒性。
论文从双向DC/DC变换器的参数不敏感性和输出稳定性出发,针对变换器模型的非线性与时变性建立变换器状态方程,设计基于Super-Twisting(ST)的电压外环、电流内环控制算法,对非线性参数变化、电源和负载扰动对变换器性能的影响进行分析。
1 双向变换器拓扑与建模分析
1.1 拓扑结构
图1为非隔离型双向DC/DC变换器拓扑,它可以看作是Buck电路与Boost电路的组合,当S2工作S1截止时,电路中的能量流动方向为V1至V2,当S1工作S2截止时电路中的能量流动方向相反。通过模态分析可知,不论能量的流向,S1和S2互补工作,V1和V2间的关系相同,因此变换器具有良好的可逆性。

图1 非隔离性双向DC/DC拓扑结构
1.2 建模分析
按照小信号模型条件,变换器工作在电流连续模式(CCM)下的Buck模式的状态方程为:
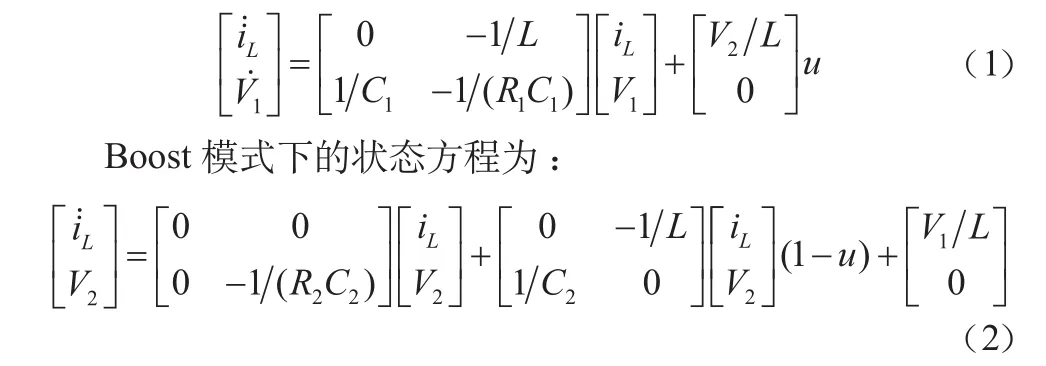
式(1)、式(2)中,u为S1工作状态,iL为电感电流。
2 ST滑模控制器设计
由文献[6]可知,ST算法具有需要知道切换面的信息少、算法相对阶数为1、计算简便、抖振小等优势。论文所设计的双向变换器控制策略如图2所示。电流内环、电压外环均采用ST算法分别设计。

图2 ST控制策略框图
2.1 Boost模式电流内环设计与稳定性分析
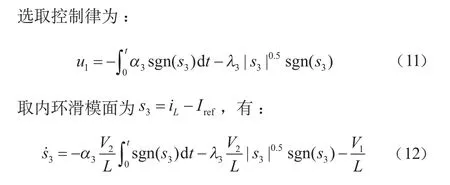
由ST控制律选取滑模面s1=iL-Iref,Iref为电感电流参考值。内环控制律为:

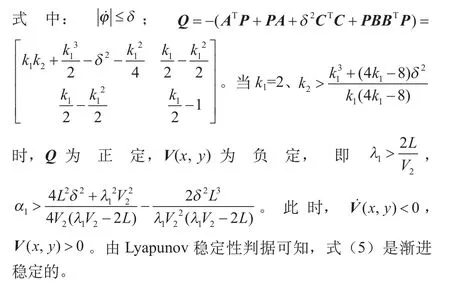
2.2 Boost模式电压外环设计与稳定性分析
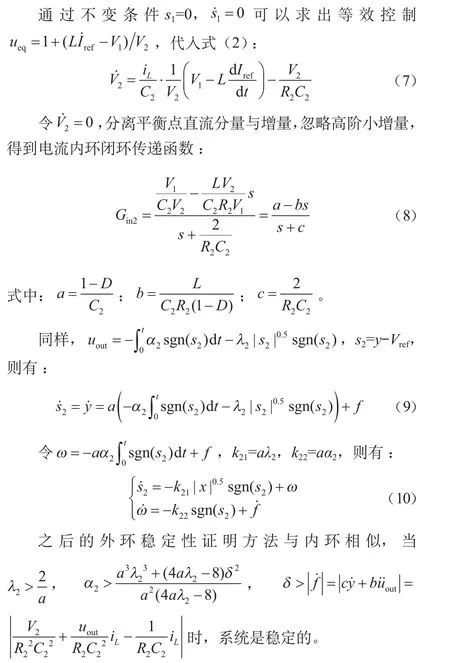
2.3 Buck模式电流内环设计与稳定性分析
2.4 Buck模式电压外环设计与稳定性分析
3 仿真分析
搭建双向DC/DC变换器仿真模型,变换器参数见表1所列,电源、负载和电路参数变化范围设定为±20%。控制器参数为α1=100,λ1=0.12,α2=2 000,λ2=4.015,α3=500.05,λ3=1.25,α4=950,λ4=3.1。
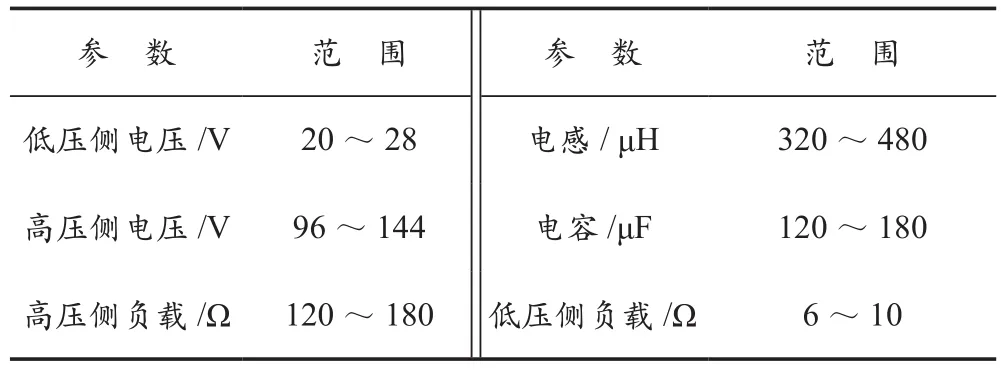
表1 变换器电路参数
选取的工作点和电路参数见表2所列。

表2 工作点和电路参数
3.1 参数变化仿真分析
从图3、图4可以看出,输出电压曲线无超调,调节时间为1.3~2.3 ms。变换器的输出电压在电路不同参数的条件下一致且无超调,调节时间约为1.3 ms。ST算法自身对参数不敏感,使得使用双闭环滑模(ST+ST)控制时,变换器在各种情况下的输出特性基本相同。
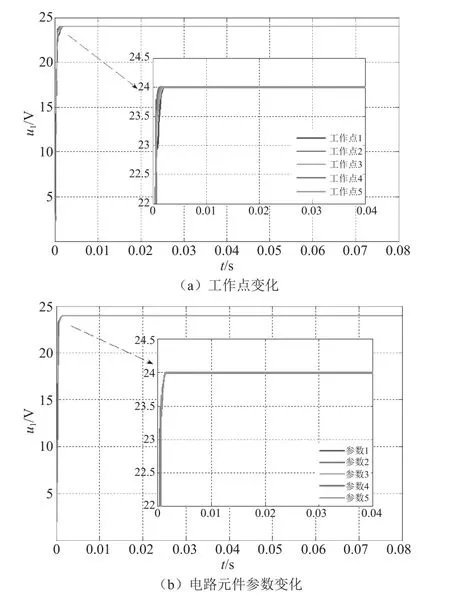
图3 Buck模式下变换器参数变化输出电压

图4 Boost模式下变换器参数变化输出电压
3.2 模式切换仿真分析
模式切换仿真结果如图5所示。state变量表示电路的工作状态:state=1表示电路工作于Buck模式;state=0表示电路工作于Boost模式。
由图5可知,在0.02 s时改变系统原来的工作状态,由Buck模式切换至Boost模式时,高压侧电压突降至119 V,约2 ms恢复,电感电流由3 A变化至-4.3 A。由Boost模式切换至Buck模式时,低压侧电压突降至22 V,约1 ms恢复,电感电流由-4.3 A变化至3 A。由此可知,系统实现了电流的两象限运行。仿真结果进一步验证了前文对电路拓扑工作模态分析、模型建立及控制器设计的正确性。

图5 模式切换仿真结果
4 结 语
论文从双向DC/DC变换器参数敏感性和模式切换出发,对不同工作模式下的控制策略进行了详细的介绍,设计了电路在2个不同工作模态下的电流内环、电压外环ST滑模控制器。仿真结果证明了变换器模型以及控制策略的正确性。
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
中国惯性技术学报(2019年6期)2019-03-04
电子制作(2019年24期)2019-02-23
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
电子制作(2018年17期)2018-09-28
通信电源技术(2016年5期)2016-03-22
电源技术(2015年9期)2015-06-05
河南科技(2014年19期)2014-02-27
华东理工大学学报(自然科学版)(2014年6期)2014-02-27
