
基于传感器的管道自主监控与维护系统
2021-10-23 06:14张虹蕾
水利技术监督 2021年10期
张虹蕾
(沈阳市水务事务服务与行政执法中心,辽宁 沈阳 110011)
天然气、石油、清水和污水管道已经成为生活中不可缺少的一部分[1-2]。为保持管道健康,进行积极监测和频繁检查至关重要[3],管道的部署、监测和维护还应保证成本效益、具备可扩展性和易于定制。
目前已经有许多技术可以监测、控制和维护各种管道运行[4]。这些技术大多依赖某种通信网络,将从管道内外收集的数据传输到控制站,使用不同网络架构提供可靠的通信,并支持管道监控[5]。但网络架构应基于可靠性因素,如网络的连通性、供电的连续性和网络的可维护性。管道监控系统应提供快速、无缝地从故障中恢复的机制,并将问题及其位置报告给要处理的控制站。
由于Ad-hoc模式和传感器网络迅速发展,传感器网络在环境监测、生态、农业、自动化等各种应用中日益受到关注[6]。传感器技术的进步使得管道系统健康状况的自动实时监控成为可能。目前也开发了许多基于机器人代理的技术来监控并维护管道,这些技术旨在检测和定位泄漏、损坏或腐蚀。同时,大量手动控制的基于机器人的系统已被提出,并开始研究半自主/自主解决方案。
本文旨在设计一种经济有效的管道维护与监控系统,为此提出了SPAMMS系统,结合传感器技术和自动化技术的新方法,用于有效的事件定位和主动纠正监测任何类型的管道。
1 SPAMMS系统总览
管道监控和维护系统应检查管道健康状况并定期向控制站报告事故,并且有助于从任何泄漏、损坏或腐蚀管道中恢复系统健康。目前现存的管道监控和维护系统受到各种限制,而一个健康的管道监测和维护系统应能提供主动的监控和恢复操作,具有成本效益、易于定制、可扩展,允许动态检查管道的功能和软件,并且实施有效的定位技术。
SPAMMS系统主要由三个组件构成:固定传感器、移动传感器和自主机器人代理。
SPAMMS的第一个组件是由一组固定的无线传感器组成,这些传感器由RFID(射频识别技术)系统实现,用于为移动传感器提供管道拓扑中的位置信息。为实现有效的定位,一组可扩展的 RFID 系统以均匀分布的方式集成在管道内,并且相邻间隔的RFID距离可有效定位可接受的误差控制。存储在RFID 中的信息可以被该 RFID 附近的任何移动传感器或机器人代理读取。
SPAMMS 的第二个组件由一组有限的移动传感器组成。通过分析管道的可用地理空间信息和检查需求,将移动传感器部署在重要位置。一旦使用中的管道部署了移动传感器,管道传输的流体将提供传感器移动性。移动传感器通常配备不同种类的检测能力,用于管道检测。这些功能与移动传感器连接后,可以同时发挥不同的作用,如移动传感器集成定位与其他组件通信的功能。移动传感器的第一个实现基于MICA1系统节点,并允许集成用于读取和写入RFID标签的RFID读取器和写入器的模块化架构。
SPAMMS的第三个组件是机器人代理,集成了RFID读写器,目标是实现拓扑感知和完全自主。根据检测和维修的需要,可配置不同类型的执行器来修复管道损坏,完全可移动。在射频识别技术和移动传感器的帮助下,能够在管道事故被识别和定位后对其进行修复。SPAMMS 监测和维护示意图如图1所示。
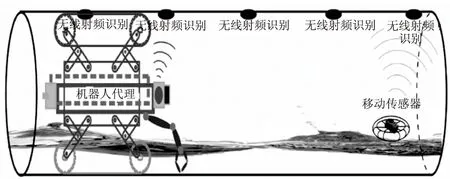
图1 SPAMMS 监测和维护示意图
2 SPAMMS系统设计
射频识别系统由两个主要组件组成:标签和阅读器。射频识别标签是应用于物体的无线条形码标签,通常贴在跟踪物体上,使用阅读器来跟踪标记的对象。包络检测是指,当集成移动传感器的射频识别阅读器发出载波信号时,射频识别标签会充电并记录其相关数据,阅读器读取调制数据。此外,射频识别标签有一个发射无线电信号的天线,以激活标签并向其读取/写入数据。许多射频识别实现冲突检测/解决机制,并允许在同一区域查询多个标签。而传感器网络用于通过感知声音、温度、光等来感知和监测物理、化学和生物环境。只要贴上射频识别标签,任何物体都可以被跟踪或感知。
在SPAMMS中,RFID作为固定传感器工作,其标签集成在管道内,两个相邻设备之间具有合理的间隔;RFID读写器集成在移动传感器和机器人代理中在操作中读写可用的RFID标签,收集存储在中间固定传感器上的事件历史记录,并在需要时清理固定传感器的内容。在SPAMMS中使用的RFID标签是被动的,它们没有自己的电池,而是利用读取器/写入器广播的传入无线电波为它们的响应提供动力。除了与传感相关的历史信息外,RFID标签中可用的、可重写持久存储用于存储与移动传感器、运动相关的有用信息,因此可以在捕获情况下帮助定位移动传感器。
SPAMMS中使用的每个RFID标签,有限的持久存储容量被分为三种类型的区域,以允许存储用于管道监控和维护以及移动传感器跟踪的必要信息的数据结构。除了识别RFID单元的数据外,表1、2和3中给出了SPAMMS用于RFID标签的数据和控制结构。

表1 RFID标签控制结构
表1给出的数据结构用于控制需要从RFID标签读取/写入的数据。该控制结构的主要领域有:冗余校验位(RCB),用于确定RFID标签中所有可用的块是否为空;15个块控制位(BCB),用于确定在各自的块中可用的数据是否可以读写。
表2中给出的数据结构用于存储移动传感器通过RFID标签位置的历史信息。该数据结构的主要字段是:移动传感器ID(MSID),它标识已经越过RFID 标签位置的移动传感器;时间戳(TS),它决定了通过RFID标签位置的时刻。

表2 RFID标签历史结构
表3中给出的数据结构用于存储事件信息。该数据结构中出现的主要字段包括:RFID ID(FSID),它标识处理持久存储的固定传感器;时间戳(TS),它决定了RFID中事件存储的时刻;事件位置(Eloc),它包含分隔事件位置和事件存储的RFID段的数量;事件类型(Etype)和事件信息(Einfo),报告检测到的事件。RFID阅读器一旦识别标签,阅读器就可以从该标签读取数据或向其写入数据。

表3 RFID标签事件结构
本文在此展示的第一个移动传感器设计基于MICA,它使用运行4兆赫兹的 Atmega128芯片。该芯片是一个8位微控制器,符合大量管道相关应用程序的需求。
除了MICA提供的一些传感功能外,还增加了两个功能。其一是允许移动传感器读取 RFID 的内容,并将与它们收集的事件和接近 RFID 的通过时间戳相关的报告写入 RFID;其二是允许移动传感器清理、删除和写入事件并验证标准。
SPAMMS的机器人代理是完全自主的拓扑感知机器人,它携带访问任何管道区域所需的模块,运行用于导航和事故分析的控制程序,同时可使用机载资源对事故做出反应。
机器人代理有四个履带车,分为三个部分:前框架、中框架和后框架。如图2所示,前端和末端框架连接到每一侧的中间框架,最大可弯曲60°,提高了转弯和穿越障碍物的灵活性。中间框架有四个可收缩轴,为履带框架提供支撑。履带框架还可以收缩其可收缩履带轴长度的50%,使机器人能够灵活地用于检查各种尺寸的管道,如图3所示。

图2 可伸缩履带侧视图
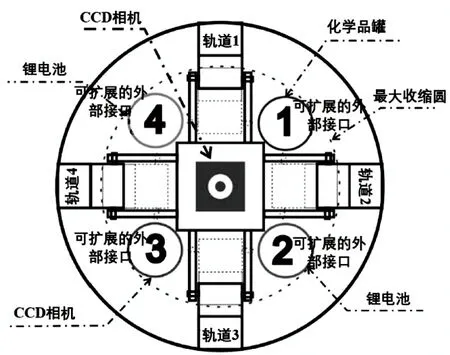
图3 机器人代理的剖面图
3 方法实现
为保证效率,推迟一些功能实现的基础上(例如分段和可弯曲的履带和先进的传感功能),我们设计了一个原型,主要包括一个RFID系统;基于MICA1的移动传感器;集成传感功能的履带机器人和标签读取能力。
本文建造原型的目标是验证在设计过程中引入的各个方面。为移动传感器提供的原型如图4所示。它实现了一个集成在两种容器中的基于MICA1的设备,一种是胶囊型,一种是球形。容器保护设备并提供浮动功能,且外形直径不超过50mm。该设备包含一个配备有通信模块的处理器、一个标签读取器和两个传感功能(光和声音传感器)。
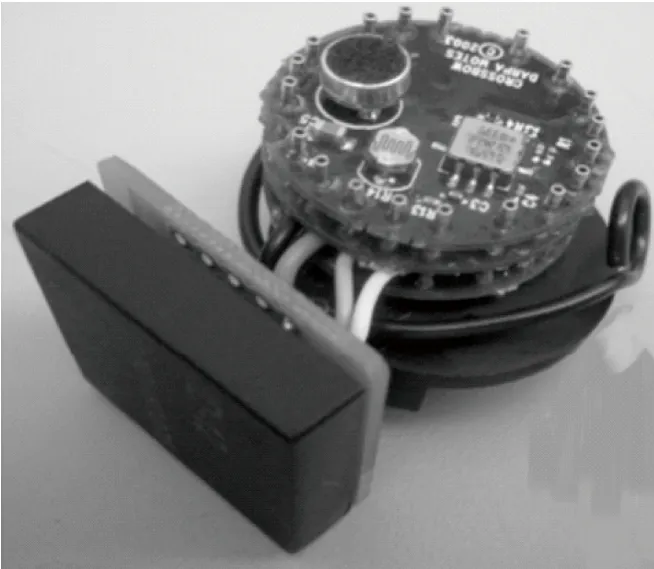
图4 基于MICA1的移动传感器原型
机器人代理的原型如图5b所示,有4个可扩展单节履带车,允许水平、垂直移动,可以改变方向。安装了一个射频识别读写器来收集存储在标签水平的信息,一个化学罐和喷雾器用于驱动,两个锂离子电池,以及一个CCD摄像头。该机器人原型设计具有高处理能力、大内存和多种传感功能。此外,机器人有4个可扩展的外部接口,用于添加不同的模块来满足管道检测需求,如图3所示。
用于自主拓扑感知机器人的管道拓扑如图 5a 所示。这种拓扑结构包括线性段、水平和垂直L形弯曲。拓扑中使用的管道是150mm的下水道管,每500mm附有一个 RFID 标签。机器人如图5c和5d所示,其中机器人分别在管道内执行水平运动和垂直运动。

图5 管道拓扑和机器人原型图
4 实验
为了验证SPAMMS的性能,本文进行了多项实验。验证随着时间的推移检查分析标签信息的大小,并比较SPAMMS与不使用移动传感器和RFID系统的效率。
SPAMMS模拟中使用的管道系统示意图如图6所示。它由26个管道段、一个上游站和一个末端泵站组成。假设RFID标签在管道检查过程中存储历史和事件信息的容量有限(50个条目)。移动传感器从上游站漂移到管道,其运动由通过管道传输的流体提供。漂移的移动传感器用于事件定位和末端泵站的进一步处理。

图6 管道系统图
在与标签占用大小相关的实验中,先推导每段管道应安装的固定传感器数量(s/s)、可容纳的检查历史信息数量(H)、移动传感器数量(n)的最佳值,以及在检测到事件信息时最适合存储事件信息的跳数(Hop)。本文实现了移动传感器尝试写入第一个可用的RFID标签,直到Hop/2,之后基于某个随机数生成器随机选择一个标签,并通过删除其最旧的条目来存储在剩余距离内的标签上。
图7和图8显示了RFID标签有限持久存储中的平均占用情况。标签的负载随着H和n的增加而增加,对于给定数量的移动传感器,标签负载随H显着增加,并随传感器的数量(s/s)而减少,显示了负载与H和s/s的乘积之间的权衡。假设H=5,s/s=10,Hop=6,图9描述了随机生成12个事件并使用20个移动传感器时所有RFID标签的负载,该图表明RFID 标签位于就在事件具有更高的负载之后,随后的RFID标签的负载随着它们与事件之间的距离而减小。
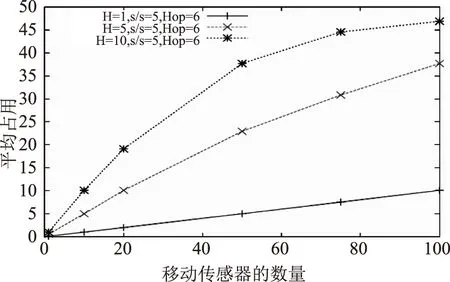
图7 RFID标签在不同历史设置下持久存储的平均占用率
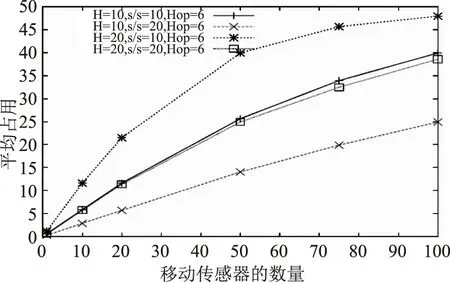
图8 不同历史和固定传感器/段中RFID标签持久存储的平均占用率
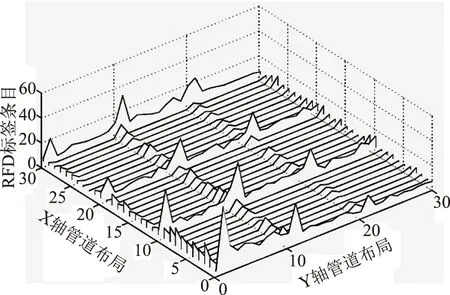
图9 12起事件的RFID条目浓度
第二组实验旨在比较机器人在三种情况下进行的跳跃距离(根据从上游站行进的段数)以找到报告的事件:①机器人知道事件位置(由系统提供);②机器人应用深度优先策略定位事件;③机器人尝试随机游走。为了比较显着,随机游走重复多次,之后计算平均跳跃距离。图10描述了每10个分段有10个的网格管道的跳跃距离比较。可以观察到该方法可给出最少跳跃距离。其他两种方法计算的平均跳跃距离与我们的方法相比非常高,并且前一跳跃距离随着事件发生段的位置显着增加。
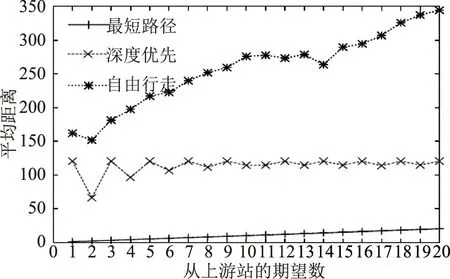
图10 三种方案比较
5 结论
本文提出了一种新型的成本效益高、可扩展、可定制和自主的基于传感器的系统,称为SPAMMS,它将传感技术与基于机器人代理的技术相结合,可有效地定位管道健康相关事件,允许主动、纠正监控并且维护管道系统。实验以及基于原型管道系统的移动传感器和机器人代理的原型设计活动证明了SPAMMS的可行性、成本效益和可扩展性。更详细的研究RFID系统中容错信息的存储以及移动传感器和机器人代理中流体速度的影响仍然是未来的工作。
猜你喜欢
汽车工程师(2021年12期)2022-01-17
军民两用技术与产品(2021年12期)2021-03-09
车迷(2018年11期)2018-08-30
海峡姐妹(2018年3期)2018-05-09
电子制作(2016年1期)2016-11-07
腹腔镜外科杂志(2016年9期)2016-06-01
学生天地·小学中高年级(2016年8期)2016-05-14
Coco薇(2015年11期)2015-11-09
少儿科学周刊·少年版(2015年2期)2015-07-07
中国火炬(2014年8期)2014-07-24
