前庭康复6-PSS并联机器人设计与ADAMS仿真
2021-10-23 12:07晏祖根窦家明刘玉斌孙智慧康琪麟哈尔滨商业大学轻工学院哈尔滨5008哈尔滨工业大学机器人技术与系统国家重点实验室哈尔滨5000
哈尔滨商业大学学报(自然科学版) 2021年5期
晏祖根,窦家明,刘玉斌,孙智慧,桑 华,康琪麟 (.哈尔滨商业大学 轻工学院,哈尔滨 5008; .哈尔滨工业大学 机器人技术与系统国家重点实验室,哈尔滨 5000)
随着人口老龄化的加剧,越来越多的老年人出现身体运动功能障碍,其中前庭损伤是一个主要病因.医学研究表明,由于人体大脑的可塑性,通过重复的康复运动,可以提高运动功能障碍患者的协调性.传统的康复训练方法由人工或者借助简单器械带动患肢进行,医护人员的康复强度大、易受治疗师主观因素影响,限制了康复效果的提升.为了应对传统康复训练方法的不足,康复机器人应运而生.康复机器人将机器人技术和临床康复医学有机结合,可让病况差异、个体差异的患者主动参与而不是被动跟随,智能地适应精确化、自动化、智能化的康复训练[1],实现人机之间协作、交互、共融的紧密耦合,进一步提升临床康复效果.
上肢康复机器人的研究相对较早,美国麻省理工的MIT-MANUS[2]、英国雷丁大学的GENTLE[3]、美国加州Palo Alto的MIME[4]、瑞士苏黎世联邦理工的ARMin[5]等为国外开发的不同形式的末端式上肢康复机器人,天津大学的李博超[6]、哈工大、上海交大等也开展了相关研究.在下肢康复机器人的研究方面, 最为典型的为瑞士苏黎世联邦理工的Lokomat[7]、美国麻省理工的Skywalker[8]、安徽工大的汪步云[9]、兰州理工的张淑珍[10]等相关研究.
目前,康复机器人的研究主要集中在上肢、下肢肌肉康复机构的研究方面,康复机器人平台的机构设计、人机交互、实验与评价等多个研究方面还存在不足,对于前庭功能损伤康复机器人的研究还较少开展.
1 前庭康复并联机器人工作原理
前庭是人体感受平衡状态变化的重要器官,由位于人耳内3个互相垂直的半规管和耳石器组成,半规管主要感受人体头部俯仰、偏转和滚动的运动信息,耳石器主要感受头部的空间位置变化和直线加速度运动信息.前庭将感受的人体平衡状态信息反馈给人体中枢系统,触发前庭觉.如果前庭功能障碍或者前庭损伤,患者会发生眩晕、平衡失调等问题,出现走路不稳、不自主偏向一侧的症状[11].
为实施个性化的平衡障碍康复训练,提出一种基于Stewart[12]机构的前庭康复6-PSS并联机器人机构,如图1所示.机器人由动平台、6条运动支链、基座等组成,每条运动支链由高性能的直线电机驱动,动平台的支撑连杆通过虎克铰分别与动平台、直线电机动子连接,机器人为6-PSS并联机器人.相比于液压缸、电动缸等驱动元件,直线电机具有更佳的动态性能.
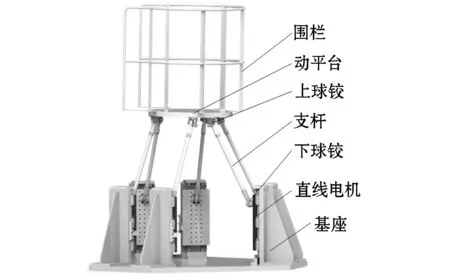
图1 前庭康复6-PSS并联机器人系统Figure 1 Vestibular rehabilitation 6-PSS parallel robot system
通过控制基座上安装的直线电机的输出,可实时改变动平台的位置和姿态.人站立在机器人动平台上,实时感受运动平衡状态的变化,产生前庭觉.通过机器人多次的重复运动,提高前庭障碍患者的协调性,进行运动康复训练.
2 并联机构运动学建模
为实现康复并联机器人的优化设计、提高机器人控制性能[13-15],将直线电机简化为移动副,虎克铰简化为球铰,建立并联机器人的机构简化模型,如图2所示.分别在机器人的基座、动平台上建立基坐标系和动坐标系,基坐标系{O-XYZ}原点O与基座几何中心重合,动坐标系{P-XYZ}原点P与动平台几何中心重合,基座与动平台的支撑连杆AiBi长度为L.
(1)
其中:c表示cos,s表示sin.
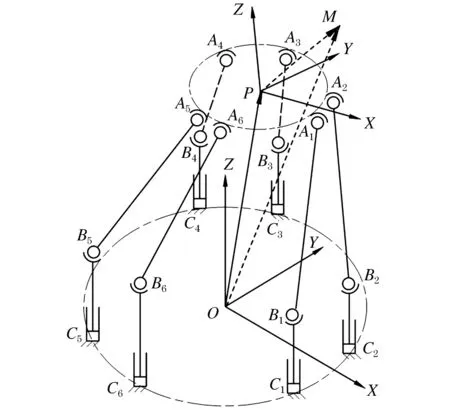
图2 6-PSS并联机构运动学模型Figure 2 Kinematics model of 6-PSS parallel mechanism
动平台上任意点M相对于动坐标系{P-XYZ}的位置矢量为pM,相对于基坐标系{O-XYZ}的位置矢量为OM,动平台坐标原点P相对于基坐标系{O-XYZ}坐标原点O的位置矢量为OP,则有:
(2)
3 并联机构运动学逆解
基座简化模型如图3所示,直线电机球铰点Bi在O-XY平面的投影点Ci位于半径为R的圆周上,Ci构成对称六边形的3条短边相等,短边C1C2长为2D.
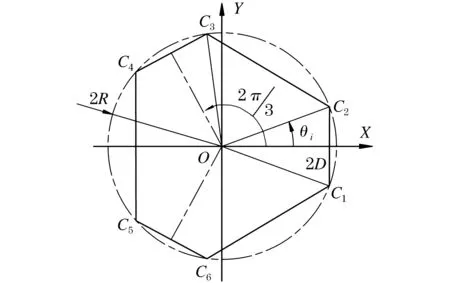
图3 基座简化模型Figure 3 Simplified base model
Ci点在基坐标系{O-XYZ}的位置为:
OCi=[RcosθiRsinθi0]
(3)

直线电机各球铰点Bi在基坐标系位置为:
OBi=[RcosθiRsinθizi]
(5)
其中:zi为对应直线电机动子移动距离.
动平台简化模型如图4所示,球铰点Ai位于P-XY平面半径为r的圆周上,Ai点构成对称六边形的3条短边相等,短边A1A2长为2d.
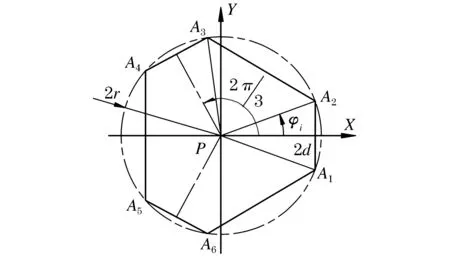
图4 动平台简化模型Figure 4 Simplified model of moving platform
Ai点在动坐标系{P-XYZ}位置为:
PAi=[rcosφirsinφi0]
(6)

结合式(2)、式(6),可求得Ai点在基坐标系的位置为:
(8)
动平台运动过程中,支撑动平台的各支杆长度L保持不变:
|AiBi|=L
(9)
如已知并联机器人动平台任意时刻的位姿OP,将式(5)的OBi、式(8) 的OAi代入式(9),可求取该时刻各直线电机动子移动距离,完成机器人运动学逆解的求解.
6-PSS并联机器人的运动学正解有歧义,很难直接求解,多应用牛顿迭代法、搜索法和神经网络等算法,进行快速的数值求解.
4 并联机构拉格朗日动力学分析
并联机器人具有封闭环结构及运动学约束等内在特性,建立其动力学模型非常复杂,常采用拉格朗日法(Lagrange) 、牛顿-欧拉法(Newton-Euler)、凯恩法(Kane)、虚功法等方法,分析并联机器人的动力学特性.
相比于其他方法,拉格朗日法在求解过程中,可避免对各执行构件速度、加速度的求解,具有运算简单、计算量小的优点,更能满足实时控制的需求.本文利用拉格朗日动力学方法分析并联机器人的动力学特性.
机器人的拉格朗日函数L为系统的动能E与势能U之差,即:
(10)
其中:mp为动平台质量,mD为直线电机动子质量,mL为支杆质量(含两端虎克铰),JL为支杆绕质心的转动惯量,vLi、ωLi为支杆的运动速度与旋转速度,JPx、JPy、JPz为动平台的转动惯量,vPy、vPz、ωPx、ωPy、ωPz为动平台的运动速度与旋转速度,vDi为直线电机运动速度,zLi为直线电机动子移动距离.
式(10)中支杆的运动速度vLi、旋转速度ωLi可通过图5的单运动支链机构简图求得.
动平台上球铰点Ai速度为:
vAi=v+ω×Ri
(11)
其中:Ri=RPAi,PAi为Ai点在动坐标系的位置矢量,动平台速度v=(vpx,vpy,vpz),角速度ω=(ωpx,ωpy,ωpz).
支杆两端上、下球铰速度关系:
vBi·Li=vAi·Li
(12)
其中:Li为向量AiBi在基坐标系中的位置矢量,vBi为球铰Bi速度.
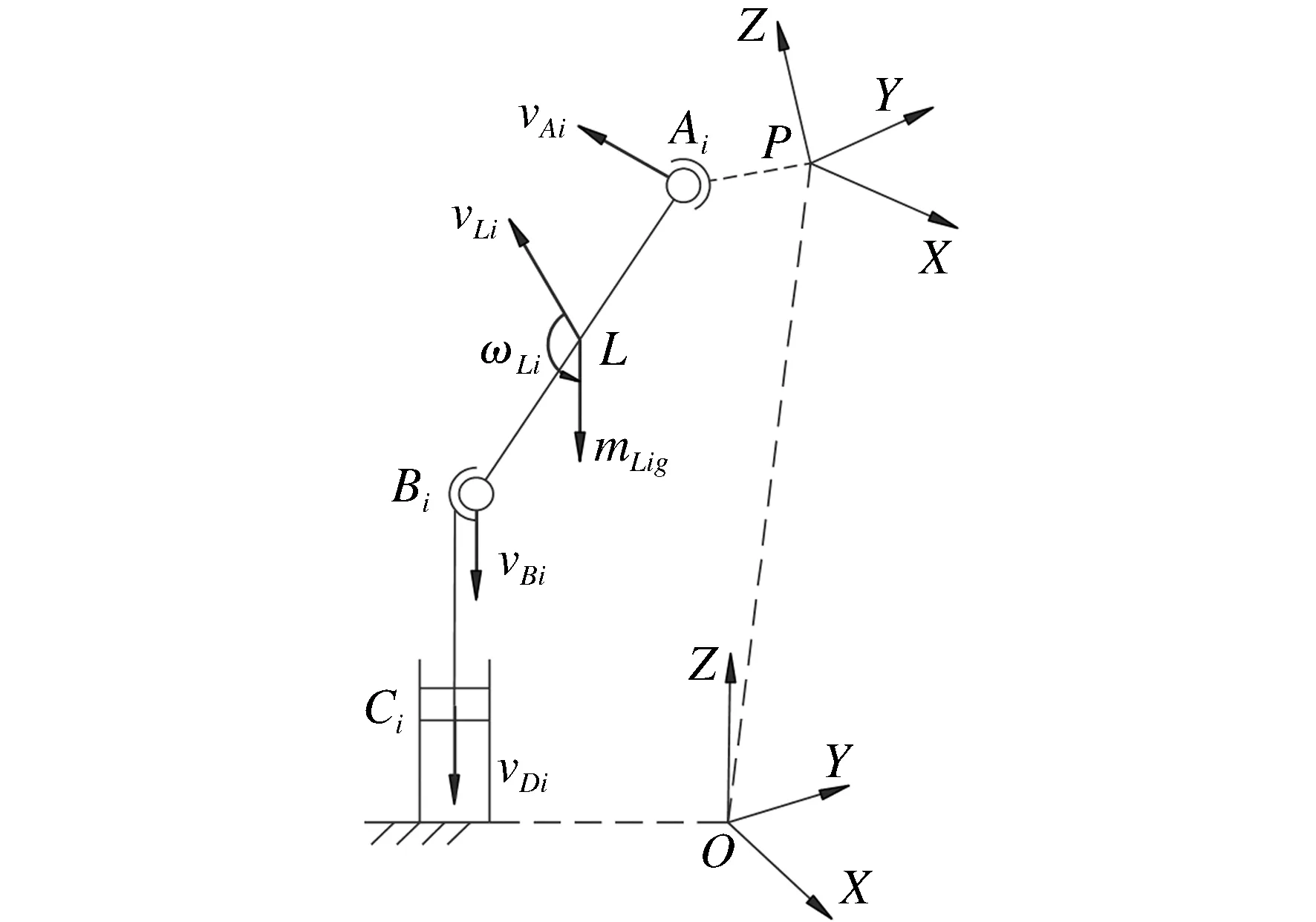
图5 单运动支链机构简图Figure 5 Single motion branched chain diagram
将式(12)代入(11)中得:
(13)
球铰Bi的速度可以简化为[0,0,vBi],则直线电机动子球铰Bi的速度为
(14)
(15)
动平台球铰速度也可表示为:
vAi=vBi+ωLi×Li
(16)
可求得支杆AiBi的质心运动速度vLi与绕质心旋转速度ωLi:
vLi=vBi+ωLi×Si
(17)
(18)
其中:Si为Bi到支杆质心的矢量在基坐标系中的螺旋表示.
将机器人的拉格朗日函数L代入拉格朗日动力学方程:
(19)
由式(19)可求得:
(20)
直线电机动子速度与动平台速度之间存在如下映射关系:
[vD1vD2vD3vD4vD5vD6]T=J×[vPxvPyvPzωPxωPyωPz]T
(21)
式(20)表示作用在动平台上的广义力分力,根据虚功原理,可求得直线电机的驱动力:
τ=[τ1τ3τ3τ4τ5τ6]
(22)
τ=JT·F
(23)
通过上述各式,当给定该动平台的位置、速度、加速度,可求出运平台广义力和直线电机的驱动力.
5 ADAMS虚拟样机仿真
5.1 搭建虚拟样机
结合康复医院的前庭障碍患者康复治疗经验,确定前庭康复机器人的设计要求:
1)动平台实现6自由度运动;
2)负载:100 kg;
3)运动范围:3个方向平移量:±30 mm,3个方向旋转量:±4 °;
4)最大加速度: 1 m/s2.
根据前庭康复机器人的设计要求,选用台达LMS67型直线电机,初步确定机器人的主要机构尺寸:动平台直径650 mm,短边长160 mm,基座直径1 200 mm,短边长280 mm,支杆长度705 mm.
基于Solidworks,建立机器人三维模型,并导入ADAMS,建立机器人的ADAMS虚拟样机模型.给虚拟样机添加约束副和驱动:在每条运动支链的球铰点Ai、Bi处添加球副约束,直线电机添加移动副,动平台上施加120 kg的负载.
5.2 动平台运动规律
各运动支链直线电机的驱动函数非常复杂且难以确定.进行运动学仿真时,先从运动学逆解出发,看其是否能够达到要求的运动状态,并查看是否有干涉现象发生.借鉴相关文献,确定动平台中心点的运动规律函数:
(24)
上式的运动规律,在0~0.5 s运动过程中,动平台沿X、Y、Z轴分别移动30 mm;0.5~1 s间,绕X、Y、Z轴逆时针旋转4°;1~1.5 s间,绕X、Y、Z轴以相同速度顺时针旋转4°;1.5~2 s间,再沿X、Y、Z反向移动30 mm,回到初始位置.
5.3 动平台运动仿真
将式(24)所示的动平台运动规律函数导入机器人的ADAMS虚拟样机,计算出动平台中心点位移、速度、加速度的合成曲线,如图6所示,位移曲线值是动平台中心点相对于基坐标系原点的合成位移值.动平台的角加速度与角加速度如图7所示.
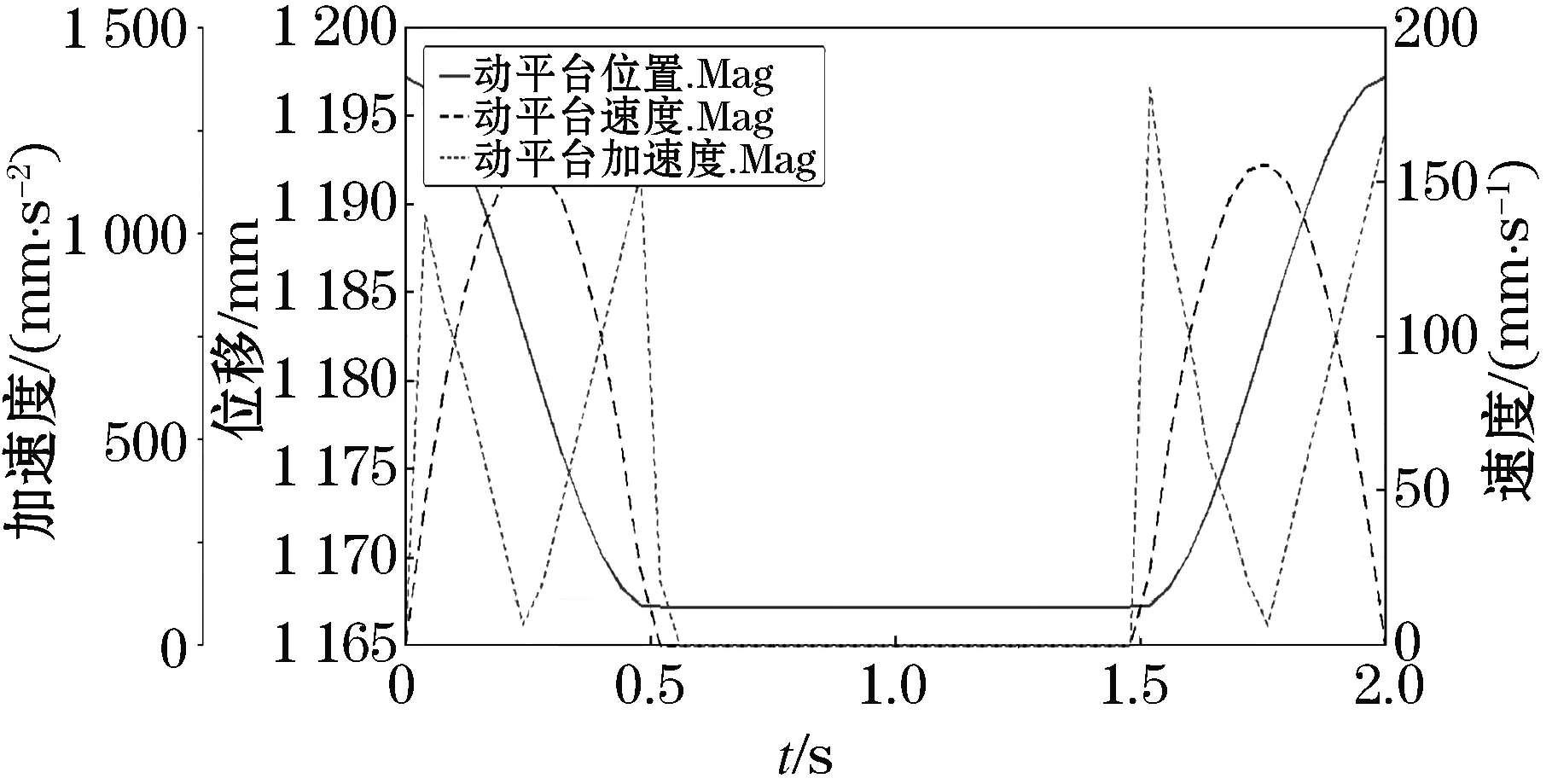
图6 动平台中心点的位移、速度、加速度曲线Figure 6 Displacement, velocity and acceleration curves
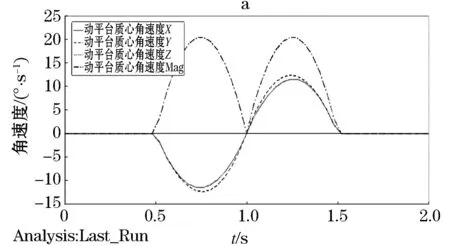
图7 动平台的角速度、角加速度曲线Figure 7 Angular velocity and angular acceleration curves
由图7可看出,动平台在0~0.5 s间呈下降状态,最大加速度为1.2 m/s2,最大角速度20 °/s.0.5~1.5 s间保持不动,动平台绕X、Y、Z轴旋转,线速度与加速度都为0.在1.5~2 s呈现线性回复状态,最大加速度为1.2 m/s2,回复到初始位置.
各驱动直线电机动子的位移曲线如图8所示.0~0.5 s运动过程中,各电机动子线性下降.1.5~2 s 间,电机动子线性下上升.0.5~1 s运动过程中,动平台仅绕X、Y、Z轴逆时针旋转,三个电机动子上升,另三个电机动子下降.1~1.5 s间,动平台绕X、Y、Z轴顺时针旋转,电机动子移动方向与前相反.
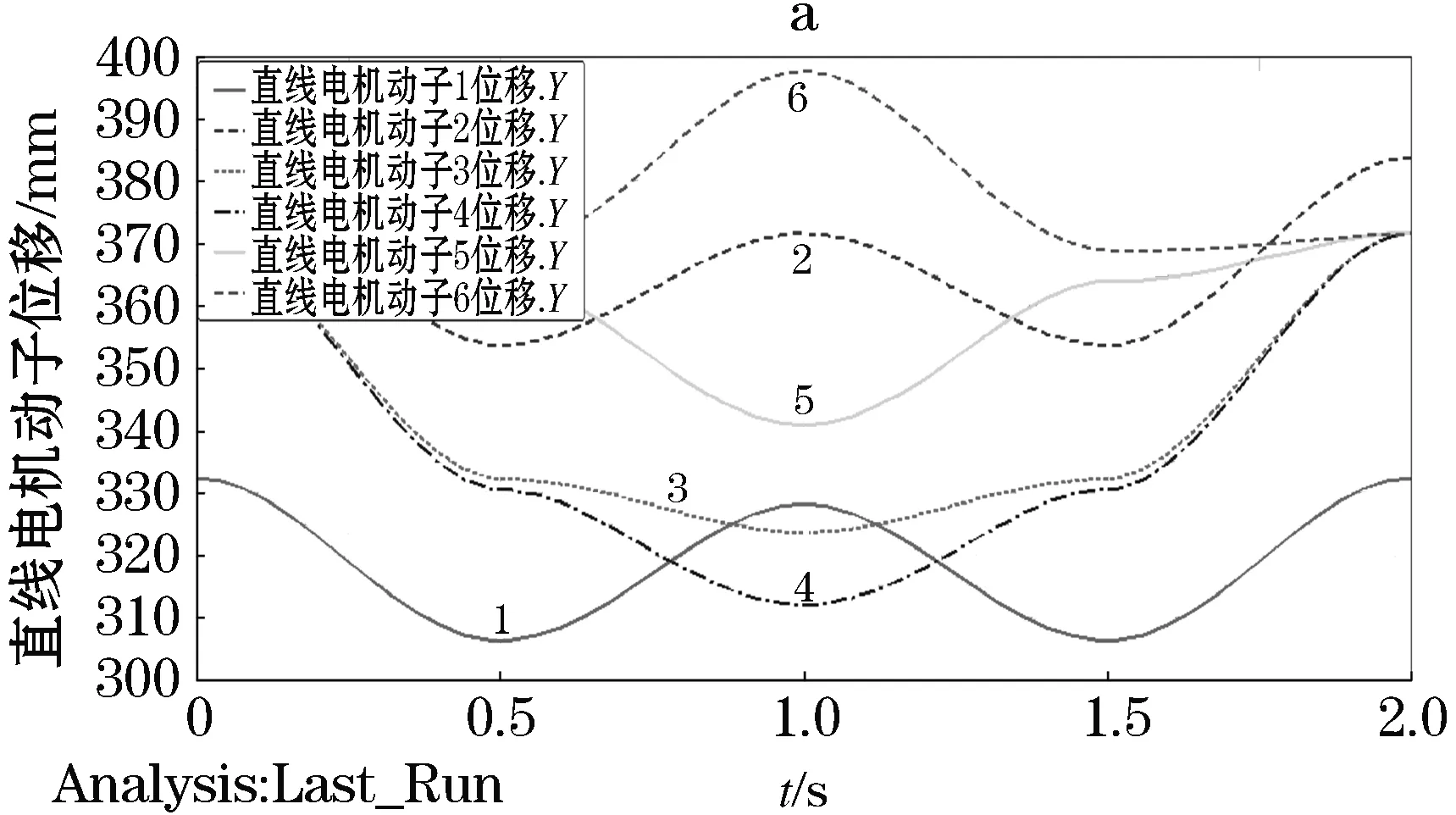
图8 直线电机动子位移曲线Figure 8 Linear displacement curve of electric motor
利用虚拟样机进行并联机构逆解计算,生成各直线电机的驱动样条函数,如图9所示.实际应用时,可调用所生成的驱动样条函数,融合轨迹规划、力矩控制、动力学控制等因素,实现康复并联机器人的实时控制.
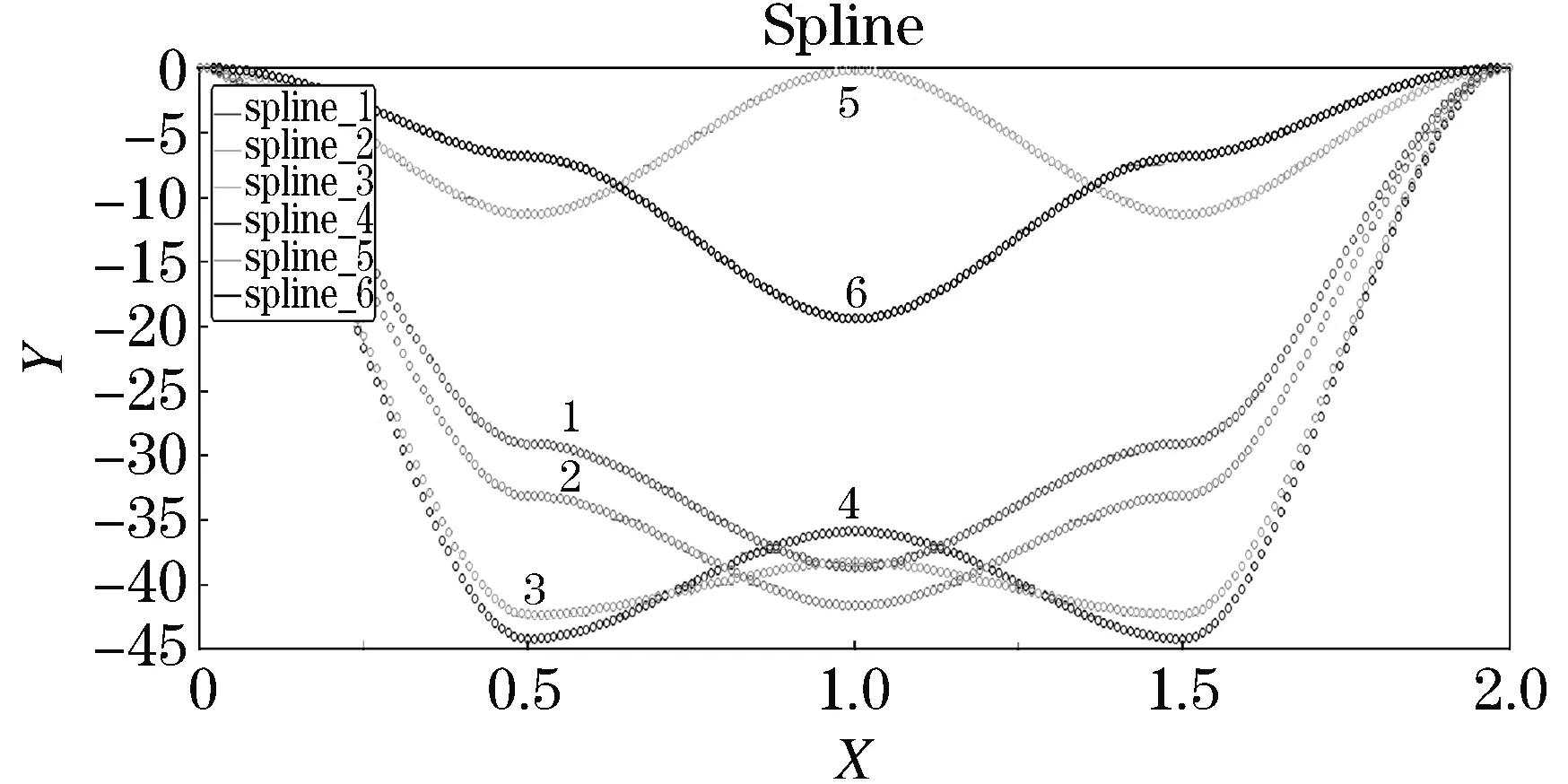
图9 驱动样条函数Figure 9 Drive the spline function
直线电机驱动力变化曲线如图10所示.在动平台下降到最低位置时,动平台突然加入转动;在从最低位置开始上升时,转动开始退出.转动的突然加入与退出,会改变并联机构的动力特性参数,使动平台出现剧烈波动.这种动平台的剧烈波动,可用于刺激动平台上前庭障碍患者的前庭觉,以利于患者的前庭康复.
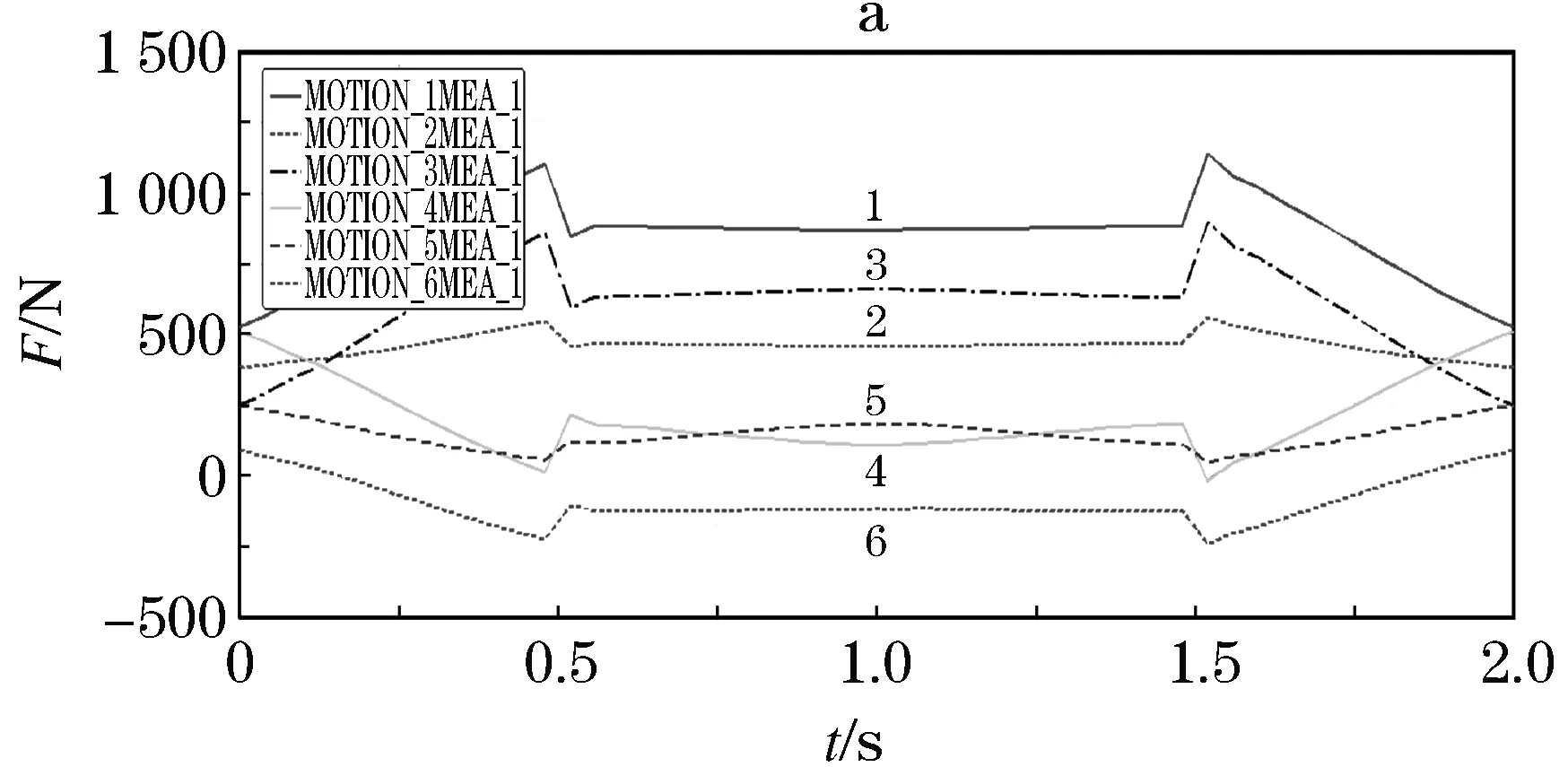
图10 直线电机驱动力变化曲线Figure 10 Driving force curve of linear motor
6 结 语
为帮助前庭障碍患者进行科学有效的康复训练,设计了一种基于直线电机驱动的前庭康复6-PSS并联机器人,建立了机器人运动学模型和拉格朗日方程动力学模型,得出了机器人运动学逆解.基于ADAMS,建立机器人的虚拟样机并仿真,仿真结果表明,机器人动平台最大加速度为1.2 m/s2,可有效刺激患者的前庭觉,进行前庭障碍患者康复训练.后续要研发前庭康复机器人样机,开展患者的康复训练实验研究.
猜你喜欢
中华耳科学杂志(2022年3期)2022-11-24
北京航空航天大学学报(2022年7期)2022-08-06
基层中医药(2022年3期)2022-07-22
导航定位学报(2022年2期)2022-04-11
中老年保健(2021年4期)2021-08-22
家教世界·V家长(2021年3期)2021-04-09
软件(2020年3期)2020-04-20
电子制作(2019年23期)2019-02-23
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21