
基于多级时间窗的综合优先级雷达任务调度算法
2021-10-21 08:06鲁金畅言陈春
火控雷达技术 2021年3期
鲁 金 畅 言 陈 春
(西安电子工程研究所 西安 710100)
0 引言
现代相控阵雷达往往集搜索、确认、跟踪、识别等多种功能于一体。而多功能一体化势必导致各种任务同时竞争雷达的时间、空间和能量等资源。这时就需要合理地安排各类任务的执行顺序,最优地利用雷达的各类资源,以满足作战任务的需求。这是对雷达多任务的调度能力提出了新的需求。
传统的调度算法[1-4]是基于任务工作方式的优先级调度算法,即按工作方式进行优先级排序,重要的任务(如确认任务、精确跟踪任务等)优先被执行;次要的任务(如气象任务、自检任务)随后被执行。该类算法着重考虑了任务重要性原则,但分隔了同一任务中驻留请求的相关性,在高负载情况下会导致低优先级一直不能被调度;文献[5]将EDF(Earlier Deadline First)调度算法引入到雷达任务调度中,该算法假设每个任务都有一个截止时间,对于截止期最邻近的任务设置最高的优先级,进行优先调度,若过了这个截止时间还未被执行,则丢弃。文献[6]从理论上证明了该算法从截止期错失率(MTR,Missed Deadline Ratio)的角度是最优的。但该算法仅考虑了任务紧迫性,而未考虑任务的重要性。 MEDF(Modified Earlier Deadline First)[7]是EDF的推广模型,它将EDF和事件优先级相结合,综合考虑了任务的时间属性和事件属性,确保有些紧迫性的实时任务(如确认任务)未必是截止期最早的,也可以被优先调度。文献[8]在MEDF的基础上,提出了基于时间窗的任务调度算法,该算法允许任务的实际执行时间可以在期望执行时间的时间窗内移动,这大大提高了任务调度的成功率。
以上基于EDF的雷达任务调度算法本质上均属于硬实时调度算法[9],即雷达任务的执行必须在某个时间点或者时间窗口内执行,过了这个时间点或者窗口期则该任务就被丢弃。而雷达在实际应用中,尤其是在定向监视模式下,当负载较轻时,可以提前于窗口期执行,以提高任务的数据率;当负载较重时,也可以在窗口期后执行,此时虽然降低了任务数据率,但提高了任务的容量。基于此,本文提出了一种基于“多级时间窗的综合优先级”的调度算法。
1 调度模型
综合优先级由静态事件优先级和动态自适应优先级两部分叠加组成。即
(1)


表1 各类任务事件优先级典型值
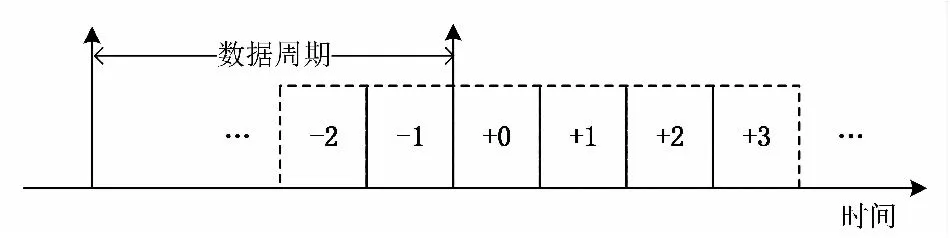
图1 “多级时间窗”动态权值
(2)
其中,τi为第i个任务距离上一次被执行经历的时间;Ti为第i个任务指标要求的数据周期;ξi是一个与“时间窗”相关的因子,表征该任务需要被执行的紧迫程度。当ξi是一个常数时,表征该任务需要被执行的紧迫性与时间是一个线性关系,ξi也可以是τi表达式,如式(3)所示。
ξi=ek·τi
(3)
此时,当k>0时,任务被执行紧迫性随时间的增加而指数级增加。
2 仿真分析
仿真选取两种工作方式,即搜索任务和跟踪任务,详细参数见表2所示。在仿真中,对于每个目标的跟踪时刻假定是从仿真起始时刻到该目标第一个跟踪采样周期间随机选取,而跟踪目标的撤销时刻是仿真结束时刻。
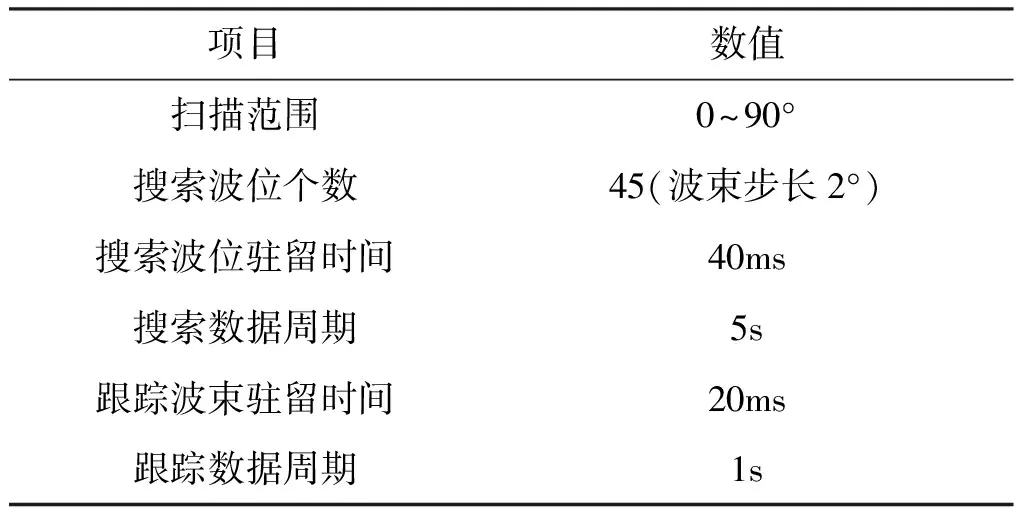
表2 仿真参数
仿真结果如图2所示,其中图2(a)分别给出了传统事件优先级算法(HPF)、最早截止期优先算法(EDF)、基于时间窗最早截止期优先算法(FEDF),以及本文提出的基于多级时间窗综合优先级算法(MF)的截止期错失率(未被调度成功的任务个数与参加调度的任务总数之比)与目标跟踪个数的曲线关系。从图2(a)中可以看出:
1)若用截止期错失率衡量调度算法好坏的性能指标,则HPF 2) 基于多级时间窗的综合优先级算法(MF)的截止期错失率恒为0,表明所有任务均被调度。 而从图2(b)中搜索任务与跟踪任务随目标个数的变化曲线可以看出: 图2 任务截止期错失率和任务数据率随跟踪目标数的变化曲线 1) 低负载情况下,跟踪任务严格等于指标规定的数据率,而搜索任务数据率随着负载的增加而变小(周期变大); 2) 随着负载的增加,搜索任务数据率增加至特定值后保持不变,而跟踪数据率开始下降(等效于事件优先级算法的优先级反转); 3) 再增加负载,搜索任务和跟踪任务的数据率同时下降,且搜索任务下降的速率大于跟踪任务。 高效的任务调度算法是实现相控阵雷达多功能一体化的基础。本文在传统相控阵雷达任务调度算法的基础上,提出一种新的基于多级时间窗的综合优先级调度算法。该算法综合考虑静态任务属性和动态“时间窗”权值两个参数,以保证低优先级的任务随着时间的增加而提高其综合优先级,从而提高其被调度执行的机会。仿真结果表明,该算法能保证系统所有任务都能被执行。且随着负载的增加,各个任务的数据率会整体下降。这符合相控阵雷达多功能一体化的需求。但在一些特殊应用场景,如雷达正在执行跟踪制导射击时,此时系统需全力保证被射击对象的精密跟踪。针对此类特殊的应用场景,还可以在以后的研究中做进一步的探索。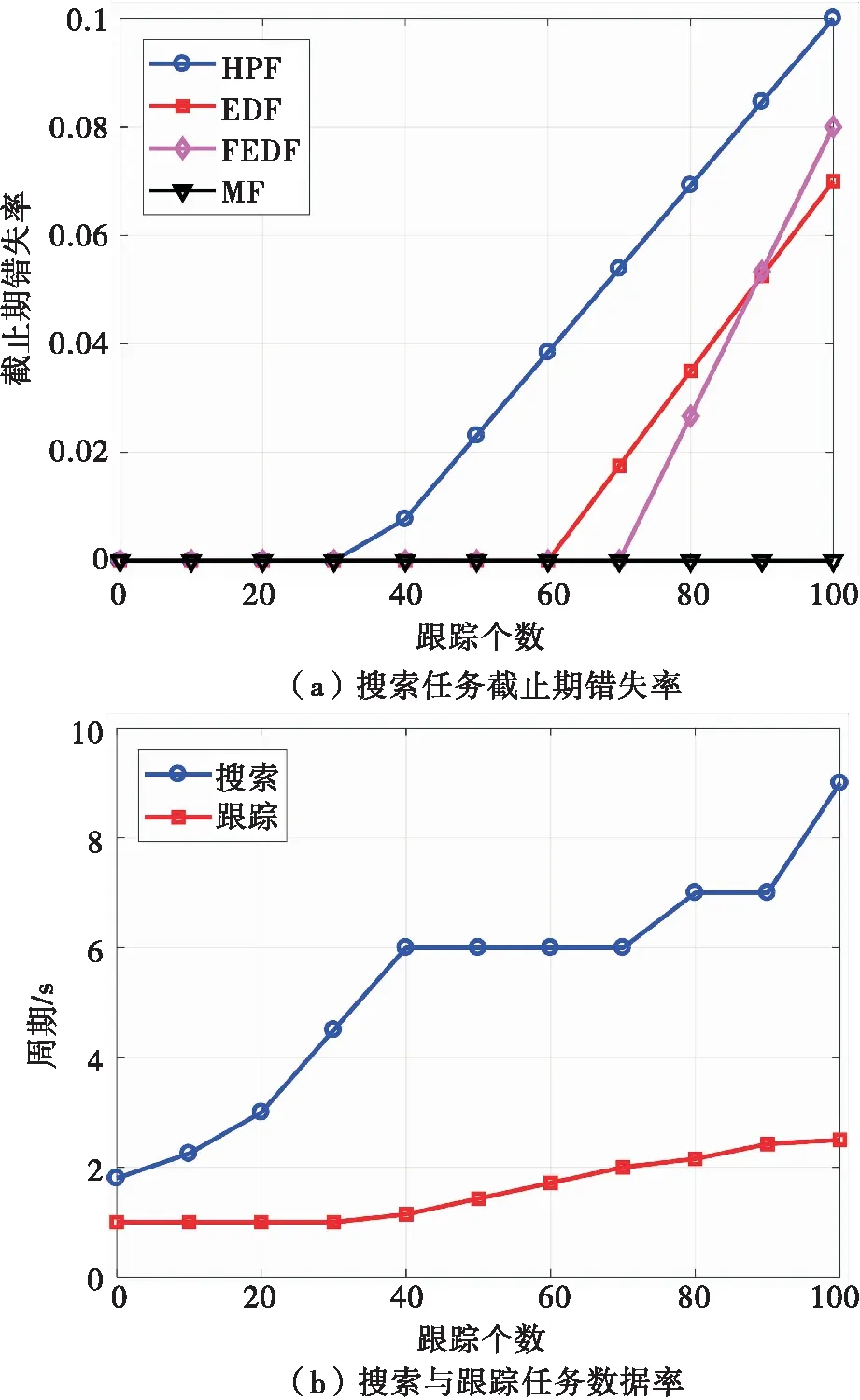
3 结束语
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
吉林大学学报(信息科学版)(2022年2期)2022-08-15
北京航空航天大学学报(2022年5期)2022-06-06
南方农业·下旬(2022年4期)2022-05-24
计算机测量与控制(2022年2期)2022-03-30
英语文摘(2021年12期)2021-12-31
北京航空航天大学学报(2021年6期)2021-07-20
百科知识(2021年6期)2021-03-30
小天使·三年级语数英综合(2019年5期)2019-06-27
科技与管理(2014年5期)2015-01-06
