
时间同步法超声波室内定位技术在智能轮椅上的应用
2021-10-19 09:26李金奎池寅生沈正定
扬州职业大学学报 2021年1期
冯 晋, 李金奎, 池寅生, 沈正定
(1.扬州职业大学, 江苏 扬州 225009; 2.扬州久信运动科技有限公司, 江苏 扬州 211403)
进入21世纪,在机器人技术及人工智能技术发展的大背景下,轮椅有成为辅助出行机器人的趋势。轮椅的自主走行能力是智能化的重要表现,而智能轮椅的关键技术之一是轮椅的定位问题,要求在室内、室外均可达到厘米级的定位精度。如何选择定位准确且经济适用的室内定位技术,对智能轮椅的设计具有重要意义。
1 主要室内定位方法
从技术实现方法上,室内定位技术有红外线、超声波、蓝牙、Wi-Fi、ZigBee、RFID、激光、地磁、超宽带(UWB)和同步定位与地图构建(SLAM)等方式[1-4]。
主要室内定位技术的特点见表1。
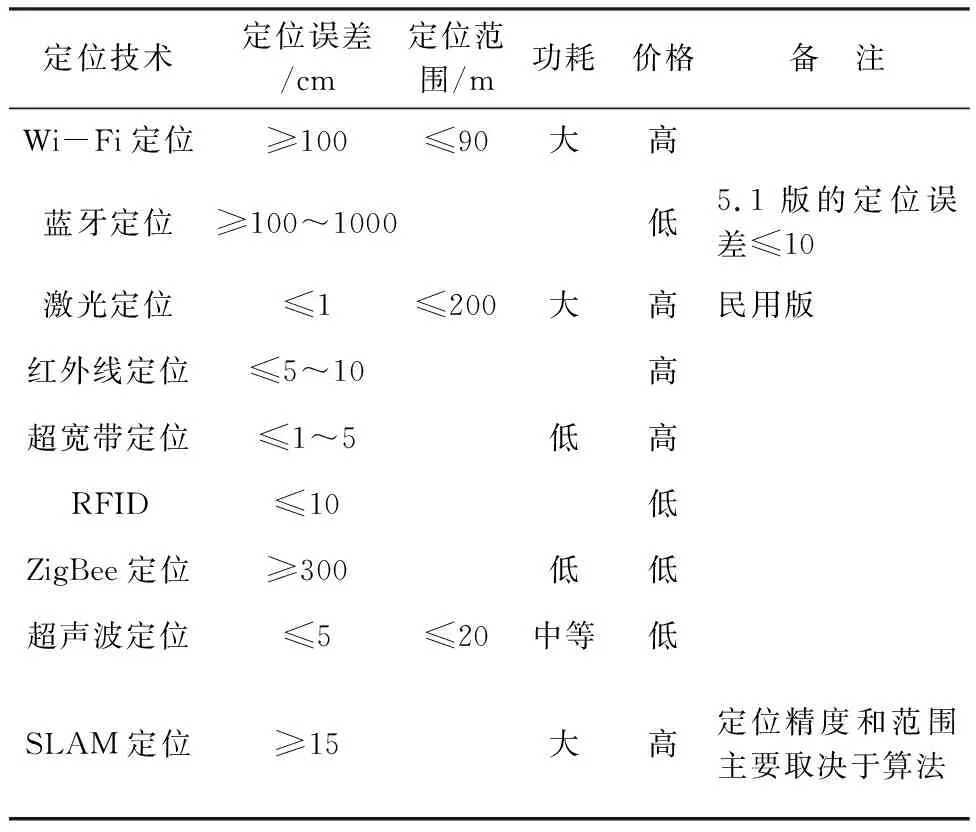
表1 主要室内定位技术
超声波定位技术是精度和经济性较好的定位方式之一,一般采用反射式测距定位,即发射超声波并接收由被测物产生的回波后,根据回波与发射波的时间差计算出两者之间的距离,并通过三角定位或三边算法确定物体的位置[5-7]。超声波定位整体定位精度较高、系统结构简单,但容易受多径效应和非视距传播的影响,降低定位精度。
本文通过改进传统超声波定位技术,得到了满意的定位精度,并且价格低廉。
2 时间同步法超声波室内定位系统
2.1 超声波测距
超声波是频率超过人耳的听觉频率极限(大约20kHz)的机械波的统称,它可以在气体、液体和固体中传播。空气传播条件下,超声波测距一般限制在短距离内(几十米内)[8]。超声波在标准条件下的空气中的速度大约340m·s-1,对于测距精度要求达到厘米级时,需要把环境温度考虑进去。例如当温度0℃时超声波速度是332m·s-1, 30℃时是350m·s-1。按到达时间(TOA)定位方法,超声波发射器和接收器之间的测距公式为:
(1)
其中,S为超声波传播距离,λ为温度修正系数,T为超声波飞行时间。
2.2 时间同步法超声波定位系统工作原理
本超声波定位系统采用收发分离方式,即超声波发射器和接收器分离,由一个超声波发射器与多个位置固定的超声波接收器组成,通过2.4G无线模块进行时间同步和数据通讯。通过这种方式,只需要接收单向超声波定位信号,避免了传统超声波定位系统收发一体方式接收反射回来的超声波信号造成的双倍定位延时,和由于传播路径过长、信号能量衰减造成的有效定位距离缩短等问题。
具体的定位系统由一个超声波发射器和若干个超声波接收器组成。超声波发射器安装在智能轮椅上,由轮椅电池供电。超声波接收器AP安装在定位区域的边界,如墙面上,由各自独立电池供电或接入220V交流电源。事先对超声波接收器进行编号,并对其位置进行标定,如图1所示。
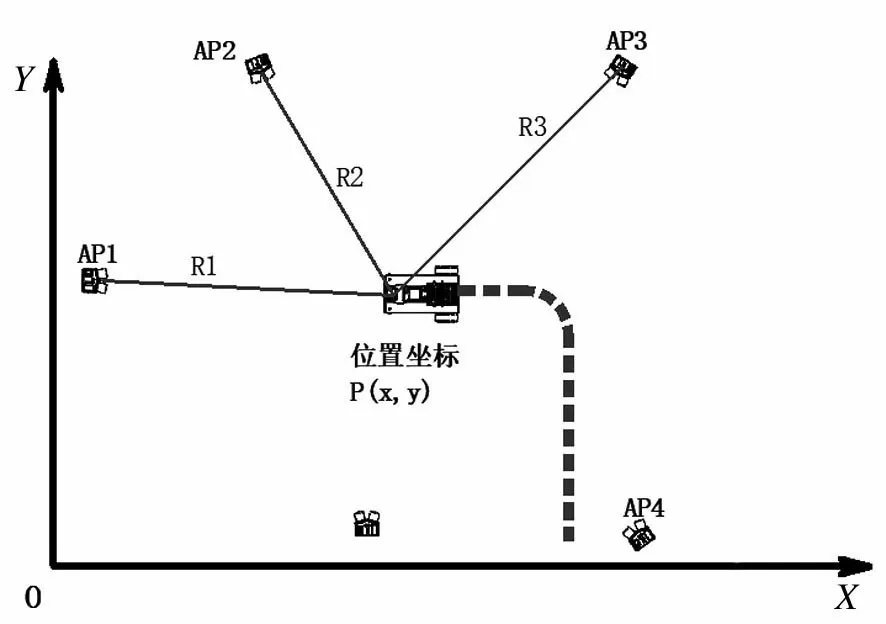
图1 时间同步法超声波定位原理示意图
为消除运动产生定位误差,在轮椅停止后再发出定位信号,完成定位后继续前进。发射器发送超声波信号时,由2.4G无线模块发出时间同步信号。在接收器端,收到时间同步信号后开始计时,到接收到超声波信号后停止计时。例如,第i个超声波接收器的无线模块在接到时间同步信号后开始计时,到接收到超声波信号时停止计时,进而得到超声波飞行时间Ti。由于是单向接收超声波信号,按公式(2)计算得到超声波接收器和发射器之间的距离Si。
Si=340λTi
(2)
超声波接收器的2.4G无线模块将距离S发送回轮椅的控制系统。一般系统中存在多个超声波接收器,通过排队方式,控制系统依次接收各个超声波接收器计算得到的距离Si。距离数据传送给上位机进行定位计算,完成定位,如图2所示。
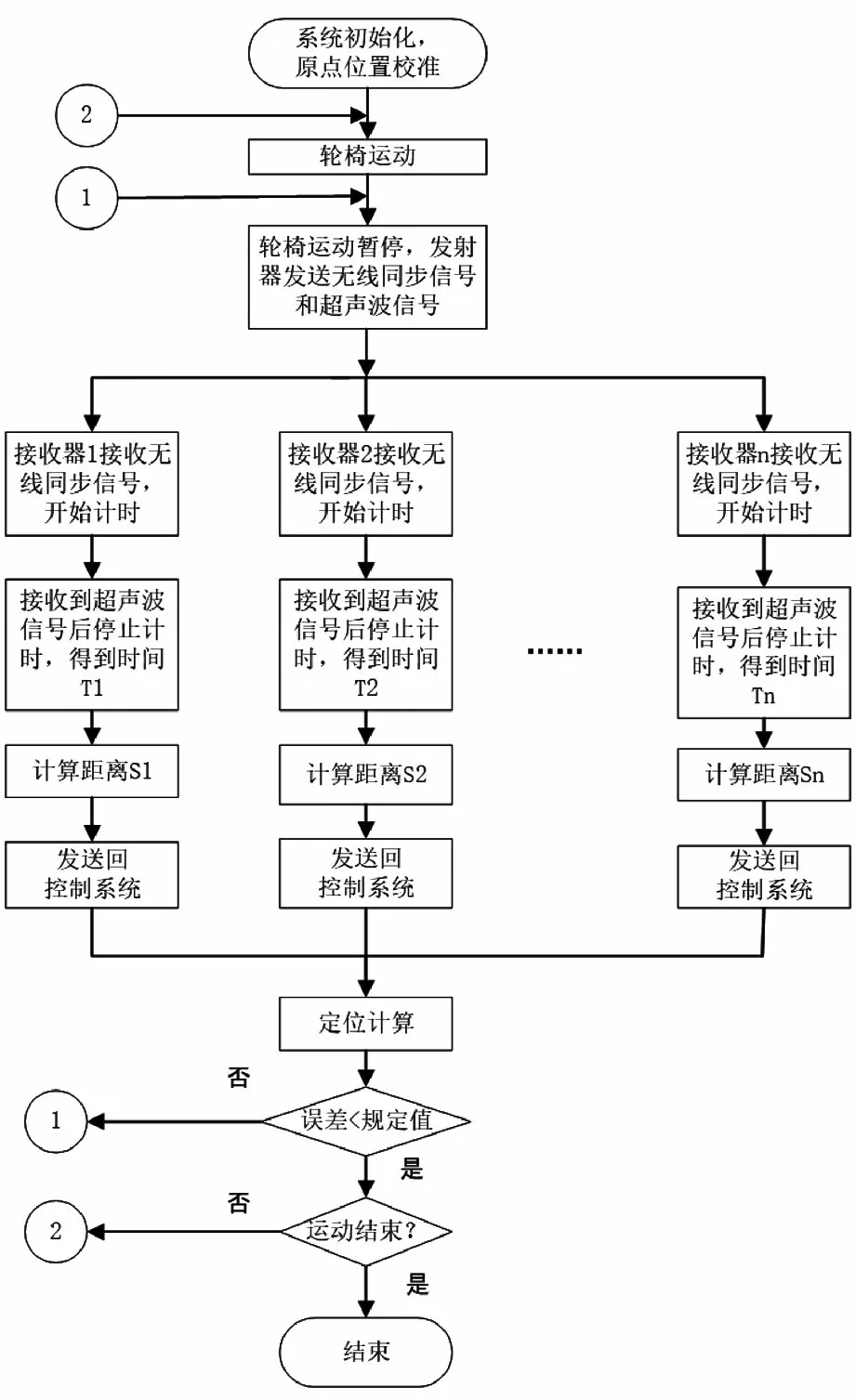
图2 时间同步法超声波定位流程图
2.3 定位算法
定位算法采用三边定位法[4,9]。理论上,以测得距离Si为半径,做三个球面,球面交点即为定位点,如图3所示。由于室内定位场景,特别是智能轮椅一般在室内平面内完成定位并沿预设轨迹移动,可以简化为平面内三圆相交的三边定位法,高程数据可以略去不做计算。以超声波接收器位置为圆心,所接收到的距离Si为半径画圆,这些圆两两相交,可以得到四个交点。通过算法去除距离较远的外交点,得到剩余的内交点P,即完成定位。
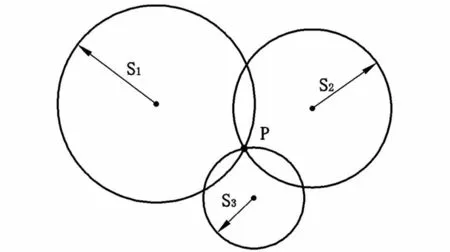
图3 三边定位法
交点计算公式:
(3)
其中,(x1,y1)(x2,y2)(x3,y3)为接收器位置坐标,事先经过测量标定。(xp,yp)即为发射器位置坐标。
事实上,由于存在测量误差,三圆一般不会交于一点,发射器坐标位置可采用质心法求解[10],限于篇幅,此处不做介绍。
2.4 时间同步超声波定位原型系统
从系统稳定性和经济性角度出发,控制器采用内核为Cortex-M3的STM32F103系列32位ARM微控制器。微控制器主要用来控制超声波发射、无线通信单元收发数据和解算数据。无线通信单元采用由Nordic公司研发的一款2.4GHz无线通信芯片NRF24L01。该芯片采用FSK 调制,内部集成NORDIC,可以实现NRF24L01之间点对点或是1 对6 的无线通信,无线通信速度可以达到2Mbps,用于收发时间同步信号和定位数据。该芯片任何一个模块都可以设置为接收或发送模式,而且可由主控单片机随时根据需要设置[11-12]。超声波发射器和接收器采用市售HC-SR04组合超声波模块改装。
无线通信单元和控制器结构如图4所示。
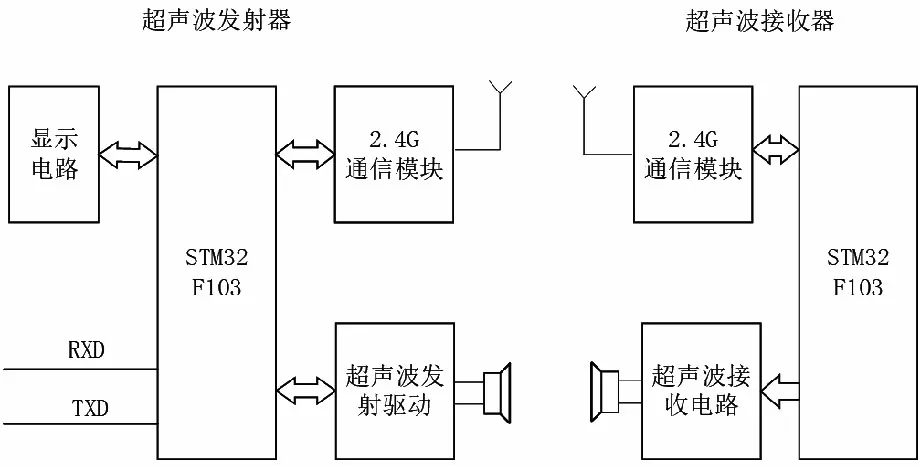
图4 无线通信单元和控制器结构
具体实施过程中,采用一台智能小车作为技术验证平台,模拟智能轮椅,上面搭载控制器、超声波发射器和2.4G无线通信模块,是被定位目标。2.4G无线通信模块和超声波接收器固定安装在定位区域的边界上,进行坐标位置标定。实验中,定位区域长度最大在15m,小车需要定位时停车静止,一次定位周期最长约为45ms。通过实测,小车实际位置和超声波定位位置误差大约在2~5cm,满足定位要求。定位误差对照表见表2。

表2 实际位置与超声波定位位置误差对照表 单位:cm
3 结论
超声波定位信号发射与接收分离,采用2.4G无线模块将发射器和接收器进行时间同步和数据传输,使得信号传播时间缩短至原来的一半,避免了因墙壁、桌椅等障碍物反射造成的多径效应带来的干扰。在不增加信号发射功率的情况下,有效增加定位距离,提升了定位精度,降低了定位意外失败的可能性。同时需要指出,由于超声波速度仅340m·s-1,相比于原型实验系统的运动速度不可忽略。为提高定位精度,本技术验证系统处于静止状态时完成定位。定位范围较大,对快速移动物体进行定位时,必须考虑定位时间造成的位置偏移问题。综合来看,由于测距比较精确,价格比较低的优点,时间同步法超声波室内定位可以作为智能轮椅的优选室内定位方案。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
导航定位学报(2021年4期)2021-08-29
兵器知识(2020年11期)2020-11-18
科学与信息化(2020年20期)2020-10-12
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
兵器知识(2019年1期)2019-01-23
小猕猴智力画刊(2018年7期)2018-08-08
红蜻蜓(2017年6期)2017-10-30
