人工微干预自动化船闸运行控制技术研究
2021-10-17 09:35高杰陈璐孙俊峰史丹
中国水运 2021年9期
高杰 陈璐 孙俊峰 史丹
摘 要:本文以船闸在套闸运行时对应于“上闸门至下闸门”这一最小运行空间区段为例,探讨船闸人工微干预自动化运行控制技术。
关键词:船闸;自动化;运行
中图分类号:U662.9 文献标识码:A 文章编号:1006—7973(2021)09-0077-03
1前言
江苏省内河航道网络密布,航道总里长约2.4万公里,其中规划三级以上的高等级航道里程约2363公里,内河货运量占全省综合货运量的三分之一,货运周转量占全省综合货运周转量的一半,是名符其实的水运大省。水路运输具有成本低、运量大的优势,但与其它运输形式相比,信息化进展相对滞后,在一定程度上制约了水运事业的快速发展。“智慧船闸”作为江苏水运信息化建设的重要目标,近年来开展了广泛的技术研究和试点应用工作。
本文以船闸在套闸运行时对应于“上闸门至下闸门”这一最小运行空间区段为例,就“智慧船闸”领域中“人工微干预自动化运行控制技术”进行探讨。
2人工微干预自动化船闸运行控制工艺流程
目前,江苏交通船闸主要采取现地分散运行和远程集中控制运行两种运行控制模式,而人工微干预自动化船闸还应具备第三种运行模式——无人工参与的“自动运行”模式,并能让上述三种模式在一定条件下相互转换。
对应于“上闸门至下闸门”这一最小运行空间区段为例,船闸“自动运行”的标准流程为:①自动关闭上游闸门→②自动打开下游阀门→③自动打开下游闸门→④自动关闭下游阀门→⑤自动打开下游进闸绿灯(上行进闸红灯转绿灯)→⑥自动关闭下游闸门→⑦自动打开上游阀门→⑧自动打开上游闸门→⑨自动关闭上游阀门→⑩自动打开上游进闸绿灯(下行进闸红灯转绿灯)。
3人工微干预自动化船闸运行安全风险评估
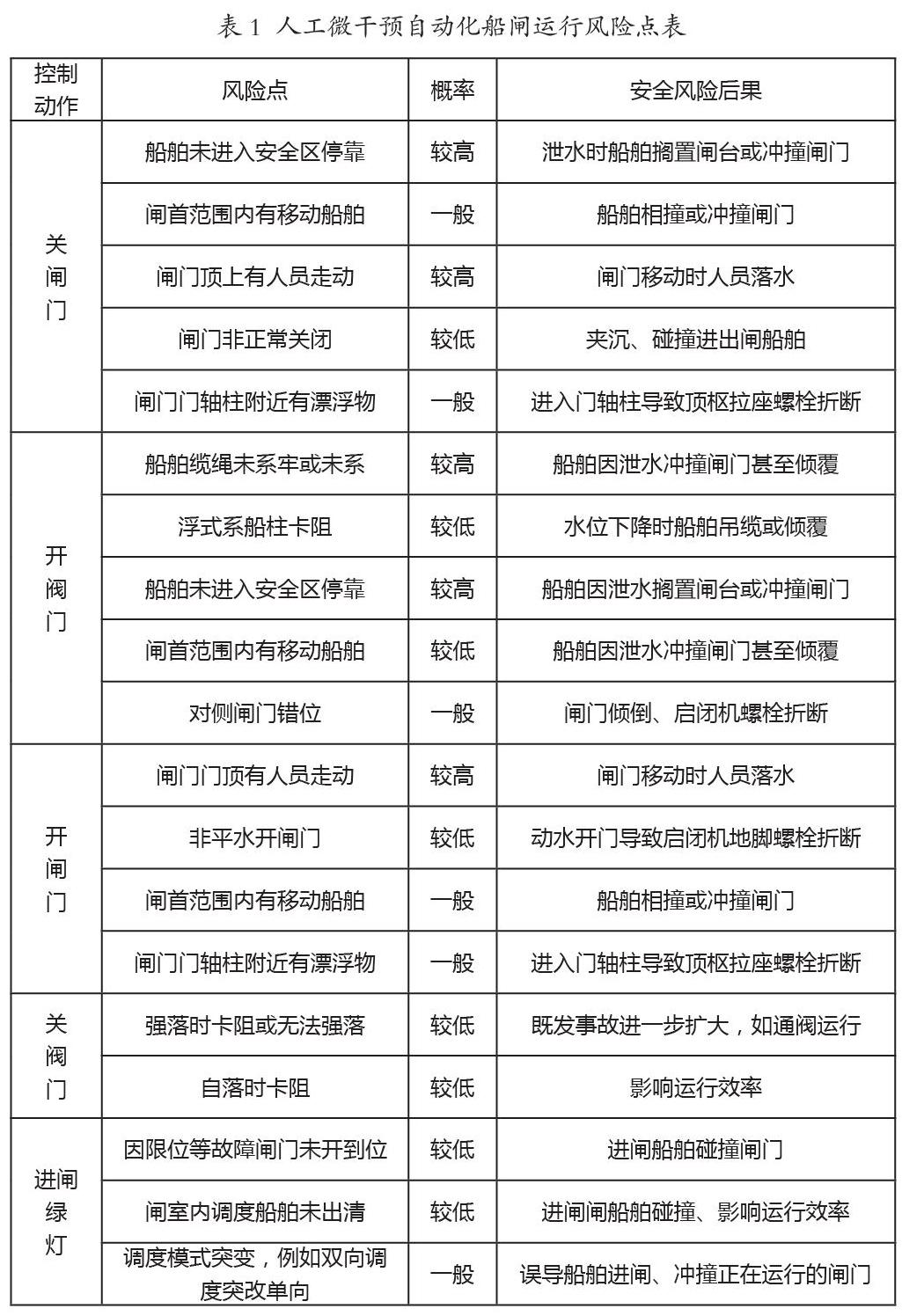
3.1人工微干预自动化船闸运行安全风险点
对应于“上闸门至下闸门”这一最小运行空间区段为例,与开或关闸门、开或关阀门、进闸红绿灯控制这几项控制动作高度相关的安全风险点如表1所示。
此外,船舶超高超速或超载进出闸、雨雾冰雪等较差气象条件、船闸机电设备运行故障等也是不可忽视的安全风险点,在船闸自动化运行整体方案设计时应一并考虑。
3.2人工微干预自动化船闸运行安全风险评估
风险评价指数矩阵法(RAC法)是船闸安全运行风险定性评估的常用方法,它将决定船闸运行安全风险的两种因素—危险的严重性(S:人员伤亡、经济损失、设施损坏、通航影响、环境污染、社会影响)和危险的可能性(P:较高、一般、较低)形成一个风险评价矩阵,赋予一定的加权值来定性的衡量风险的大小。风险源点的风险值(Ri)等于后果分值(Cs)与发生可能性分值(Pr)的乘积,即:
Ri=Cs× Pr
式中:Ri为风险值;
Cs为后果分值;
Pr为可能性分值。
4人工微干预自动化船闸运行技术条件
增设外场感知设备、提升运行现场运行风险的感知能力,是实现船闸自动化运行的必备手段。在综合评估船闸自动化运行安全风险的前提下,基于外场感知增强方案的人工微干预自动化运行中各动作发生的必要条件如下:
4.1自动“关闭上游闸门”条件
关闭上游闸门互锁条件判定+下行船舶进闸数量信号采集比对+上闸首人员安全侦测+上闸首船舶安全侦测+闸门关闭过程中无危险物体/船舶接近+下行船舶进闸身份信号采集比对。
(1)上述条件为自动“关闭上游闸门”的必要条件,参与PLC运行控制;
(2)船舶进闸数量信号由外场感知设备采集,与智能调度信息系统相关调度信息比对后,输出结果参与PLC程序运行控制;
(3)闸门关闭过程中无危险物体/船舶接近信号采集,由外场感知设备(视频或激光测距仪)檢测。检测到物体或船舶危险接近,PLC控制闸门停止运行,人工确认危险消除后,闸门继续运行;
(4)船舶进闸身份信号由外场感知设备采集,与智能调度信息系统相关调度信息比对结果用于船舶身份验证、稽查报警等,因不匹配现象仅为偶发,所以船舶进闸身份识别目前不参与运行控制;
(5)船舶进闸数量信号外场感知设备与智能调度网在同一网络,比对结果输出参与PLC程序运行控制;
(6)上闸首人员安全侦测与上闸首船舶安全侦测外场感知设备与控制网在同一规划网络,监测结果参与PLC控制运行。
4.2自动“打开下游阀门”条件
自动打开下游阀门互锁条件判定+上闸门关闭时错位信号采集+下行进闸船舶越限检测+下闸首船舶安全侦测+闸室船舶系缆侦测+浮式船柱卡阻检测;
(1)上述为自动“打开下游阀门”必要条件,参与PLC运行控制;
(2)感知设备与PLC设备同网络,检测结果参与PLC运行控制;
(3)下行进闸船舶越限检测+下闸首船舶安全侦测均始于上闸门关闭到位。若检测结果异常,立即发出声、光、语音报警,阀门停止运行;
(4)闸室船舶系缆侦测重点对首档船系缆情况进行侦测,结果作声光语音报警通知,能确保侦测准确的前提下也可参与PLC自动“打开下游阀门”控制;
(5)闸门关闭错位信号采集包括接近开关信号和视频监测信号(人字门)。检测发现异常则不能泄水,并立即将错位报警信号及错位视频切入监控平台;
(6)提阀过程中,检测到浮式系船柱卡阻(激光测距仪连续检测无变化且与其它全部浮式系船柱水平位置距离偏差呈正相关),则触发语音播报,同时强落阀门;
4.3自动“打开下游闸门”条件
自动开下闸门互锁条件判定+闸室内外水平信号采集+下闸首船舶安全侦测+下闸首人员安全侦测+闸室内外水位差信号采集;
(1)上述为自动“打开下游闸门”必要条件,参与PLC运行控制;
(2)感知设备与PLC设备同网络,检测结果参与PLC运行控制;
(3)人字形闸门本身安装有门头开关,因此闸室内外水位差信号检测对人字形闸门为非必要条件,对横拉门和三角门为必要条件;
4.4自动“关闭下游阀门”条件
自动“关闭下游阀门”互锁条件判定。
(1)上述为自动“关闭下游阀门”必要条件,参与PLC运行控制;
4.5自动“打开进闸绿灯”条件
闸门开到位+闸室内调度船舶出清+同向调度指令发出。
(1)上述为自动“打开进闸绿灯”必要条件,参与PLC运行控制;
(2)调度系统上行调度指令的发出是“打开进闸绿灯”的触发条件,这里控制系统与调度系统需要进行数据交换;
4.6其它技术条件
⑥自动关闭下游闸门→⑦自动打开上游阀门→⑧自动打开上游闸门→⑨自动关闭上游阀门→⑩自动打开上游进闸绿灯(下行进闸红灯转绿灯)的技术条件依此类推。
5其它要求
(1)航闸全息智能感知网建设是智慧船闸不可或缺的环节,是船闸自动化运行的安全保障;
(2)船闸自动化运行涉及控制系统与智能调度系统数据交换和业务协同,技术路径应充分考虑网际边界安全问题;
(3)功能设计与感知网布设应充分考虑费效比和运行效率,力求安全第一、效率優先、功能完善三者平衡;
(4)基于船闸自动化运行监测、业务协同、远程控制等运行要求,模拟量数据及监测终端几何级增加,需对船闸控制系统网络架构进行顶层设计;
(5)人工微干预自动化船闸运行过程中应为现场巡检人员提供紧急状态下的应急处置手段(如暂停、急停、强落及故障告警等);
(6)感知终端设备提供错误动作信号及闸阀门启闭机、电气等关键设备带故障运行同样是不可忽视的船闸安全运行风险。
6 结语
船舶过闸是一个复杂的过程,影响安全的因素较多,人工微干预自动化船闸需要在全面评估船闸安全运行风险的前提下,通过构建自动化船闸运行控制标准化流程,完善预防预控体系,强化运行环境及设备动态感知能力,在航、闸、船、水一体化协同运行指挥体系下实现人工微干预船闸“自动化运行”,在充分保障船闸安全运行的前提下,提升船闸的运行效率。
猜你喜欢
企业文明(2017年5期)2017-05-31
中国市场(2016年36期)2016-10-19
科学与财富(2016年28期)2016-10-14
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
少年科学(2007年12期)2007-02-27
中国三峡建设(2004年5期)2004-01-12