
立体车库充电桩供电自适应无弧开合系统的研制
2021-10-14 08:50:46郭青龙
新能源汽车供能技术 2021年1期
郭青龙
立体车库充电桩供电自适应无弧开合系统的研制
郭青龙
(广东绿网新能源科技有限公司,广东 珠海 519060)
介绍了一种面向立体车库配套的充电桩供电用隔离刀闸无电弧开合自动供电装置系统。这种装置系统在对移动车位上已被连接并进入待充电状态的充电汽车安全稳定到达有效库位后,利用校正机构让隔离开关活动刀闸与库位上的静止刀闸卡口进行合分闸位置校正确认并自动合闸、监测判断并给出是否启动充电桩的功率输出回路进入充电状态指令。该系统借助隔离开关刀闸动静触头分闸后可移离,合闸前须对齐,无负载开合无电弧的特点,为立体车库待充电车辆移库后接入固定大功率电源提供了安全可靠的拓展应用选型方案。
立体车库;充电桩;隔离开关;位置双确认;无电弧开合
0 引言
随着大功率充电管理技术的发展与充电桩作为基础建设规划的纳入,居民消费能力的提升各地汽车保有量数据逐年壮大,继而停车难和电动汽车续航充电矛盾也就越来越凸显。相应地随着近年来立体车库技术的自动化和人性化设计完善成熟[1-3],在解决停车难的同时电动汽车方便快捷充电变成为立体车库需要面对的新问题[4-5]。显然,让传统立体车库顺应当前社会需求并实现集约化管理完全可以带动电动汽车应用的进一步发展。不过,相比立体车库的停车密度而言,增加了充电功能下的充电设施及消防安全则是随之来的极大应用顾虑[6]:确保大功率充电时与地面电网实现安全接驳是消除充电安全隐患的技术策略之一。与之对应地,当前已有诸多技术完成了技术并开始付诸应用[7-13]。这些技术文献有着各自的适配性取舍设计——有考虑降低功率器件插接电弧的,有考虑防水防静电和通流便捷安全的。文献[14]在升降类立体车库基础上设计了一种滑环换向器机构,以应对小功率充电功能和信号传输连续性,虽有一定的应用意义,但显然这种结构并不适合电动汽车的应用。文献[15]的研究虽适应电动汽车,但这种技术方案显然只适合带有无线充电模块的单一类型车辆,不具备广泛应用性。而文献[16]的研究设计显然是在充分评估了这些类似设计后才考虑采用集控式充电机组的技术方案来实现各种不同结构立体车库的充电应用的,但从最终的市场应用角度来说,这类集成化设计虽好却存在面向对象仅限制于能布置这种定向设计系统的用户而不是广泛大众,尤为突出的是这些带电的“滑动”或“移动”导电件连接部件都只能采用“定制”化的而不是“大众”化的兼容问题:只能在自己的产品领域实现对应的拓展应用而无法实现“通存通兑”的效果。
本文设计研究的系统装备正是在综合这些公开文献中的优点后,充分利用当前配电系统常用的一种无电弧开合隔离开关的全新“拆装”式设计组合,并结合当前充电桩供电功能需求,设计完成了一种新颖的可应用于任何结构形式的立体车库中的智能化开关系统装置。这种系统装置有自己的功能中央处理系统与通信单元,通过与传统充电桩在用户端的状态量组合后,实现功率负载的无电弧开合、电动汽车端的无损及无人为介入的自动供电,从而协助充电桩完成桩机与地面固定端电网的良好安全隔离防护及通流控制,是立体车库充电设施扩建或新建的优选设计选型方案。
1 总体结构
结合当前电动汽车存库时间的应用场景与可能存在充电方式、最大充电时间、车库结构形式、停运时间及其整体后期运营成本等综合因素[17-20],本文基于适配通用型充电桩的功率输出应用与充电启动机理,设计完成了可直接面向运营用户的集分离式隔离刀闸机械开关与智能化位置确认校正、无电流自动合闸送电与分闸断电一体化的安全配电装置系统。整体系统功能单元设置如图1所示。

图1 系统方框图
基于安全可靠性考虑,新系统在电动汽车车位移库入位前处于由市电适配单元、电源管控单元和小型备用电池单元下的库位移动端自备电源状态工作。当待充电电动汽车在立体车库控制系统下移库入位后,系统装置自动进入位置确认状态:由功率驱动器带动相应的机械传动装置移送分离式隔离开关动静触头组件进行合闸前的位置校正,位置状态确认时依赖机械系统给出的状态开关量提供的模拟信号。一旦位置状态确认符合状态向量时,主控单元的中央处理器给出对应的合闸指令,由功率驱动单元驱动机械系统完成刀闸的闭合导通,导通条件全部符合时主控单元给出供电回路串接的自保持翻转式功率接触器接通负载。至此完成隔离刀闸的无电弧合闸驱动。充电终了后先行断开接触器,再执行隔离刀闸的无电流无电弧分闸指令。
1.1 主控单元
本系统以ATmega128为主控单元核心信息处理芯片完成系统装置所需的实时动作指令解析、机械装置位置状况检测及数据传输处理和实时状态向量处置等功能,其高达1 MIPS/MHz的数据吞吐能力完全适合智能化通信管理和系统处理速度的多种任务需求[21]。
1.2 双确认系统
基于新系统装置的主导电回路在对车位移库到位对接地面固定供电点连接中采用供配电系统常用的隔离开关进行动静触头进行有效的“拆分”装配方式来实现,显然被分别固定在移动车位上的动触头系统与固定库位上的带电静触头而言应该有着良好的稳定性、准确性和可靠性,并实施与应用场景适配的刀闸位置识别技术[22]才能保障设备运行安全有效的完成“合闸”供电动作。为实现这一有效的管控目的,系统特采用了独立的位置状态确认单元来完成。
充分评估当前配电用隔离开关分合闸位置双确认检测方案各有优缺点[23],综合系统工程化量产成本的基础上,结合本文中的“拆分”式隔离刀闸实际工作的应用机理及结构特点,搭建了如图2所示的位置检测确认系统单元,确保整体装备系统的有效稳定安全运行。

图2 双确认系统框图
特别地,为减少不必要的低压用电电源管理,本文设计的位置确认布置的光电器件用电部分被设立在动触头区域的车位“移动端”,而光电开关非用电工作的辅助器件则布置在库位“固定端”。
在位置确认系统设计时充分评估性价比与施工难易程度,采用机械行程开关作为位置确认系统启动的前提要素,采用激光漫反射光电开关作为供电开关动静触头位置确定的第一位置条件,红外线U槽型传感器作为动静触头对齐校正第二条件,当两个条件满足状态向量定义后,对主控单元给出位置校正终了信息,主控单元给出动触头系统合闸指令。一旦动触头机械系统合闸到位后,动触头机械联动装置给出对应的压力信号至位置状态数据处理器转换成合闸合格信息反馈给主控单元。主控单元只有获得位置正常与合闸正常的双重信息后才执行对应的后续充电启动过程,并在充电终了后提前移库中断充电、接触器辅助触头给出断开信息后,自动断开隔离刀闸,等待车位的下一次机动移库。
1.3 动静触头组件
本文中的动静触头组件是新系统装置的主要功率电流导电回路,也是实现库位固定端与车位移动端功率供电的有效连接器件。基于最大程度的应用便捷性与用户维护的可行性,在其载流允许范围与绝缘电压符合公共用电安全的前提下,采用常用电力配电低压隔离开关配套器件及原有功能性结构为主体,拓展应用为原动触头刀闸被设置在本文下的系统装置上一体化固定在可移动的“车位”上,而原有的静触头则被固定在地面的库位旁。当有需要充电的移动车位到达后,动刀刀闸在获得位置确认系统的有效“确认”后,主控系统对串接在隔离刀闸回路中的功率接触器给出控制指令,完成刀闸回路的负载电流通路,进而完全避免隔离刀闸会带着负荷与库位供电端进行合闸或者分闸操作。相应地,为获得隔离开关刀闸机械系统合闸与分闸的双向稳定性驱动,采用BTM7752G为马达驱动芯片[24],该芯片的内置过压、过流保护功能有利于立体车库复杂电磁环境。
2 功能设计
本文系统设计集成时,确立这是一种面向立体车库运营用户的市场化选择与易于维护相结合的新系统装备,也是一种可以适配当前已知文献下的非专用型常规交直流充电桩在立体车库中的应用,更是当前泛在电力物联网拓展应用中具备网数据采集、通信和计算处理优势的智能化系统集合。
2.1 充电流程控制
本文研究的新系统装置是常规充电桩的一个拓展应用附属配套设施而不需要对立体车库中所配套的充电桩进行集中管控约束。故而充电控制导向与胡道栋等[25]研究的集群式管理存在很大的应用性区别——新系统装置注重的是本体内部数据的良好运算与模拟量管控,是物联网技术在配电终端中的拓展应用智能化集成,也是一种具备物联网功能下的能独立运行的智能化系统配电终端装备。鉴于此,本文研究的控制系统同样需要具备互动、优化、兼容与集成的综合性特色[26],基于实际功能与面向对象的不同,无论实际充电用户采用的支付方式是在线卡或者是离线卡甚至是专用APP模式,本系统都是基于充电桩的“待充电已准备好”模式进入启动、采集主回路大电流而判断充电是否终了的。而对应地非充电终了的提前取车“中断充电”,则是依据取车移库动到达库位时作为主动断电状态依据的。故本文下的系统方案设计时采用了如图3所示控制管控流程。

图3 充电流程管理
按照设计方案,本系统装置主要完成移动车位充电桩的与库位上固定电网接口的“供电”连接。考虑直接面向立体车库的应用运维,本文系统下的系统装置采用直接采集原有充电桩上的充电枪位置状态作为系统启动的前提:对原有充电桩进行无损更换带有充电插头位置检测[27]的“充电枪收纳座”后即可获得有效的充电枪是否在“收纳位”的信息。根据充电枪头是在收纳座还是已经被移出做出有效的主程序运行启动信息,实现最大可能的兼容当前市售充电桩。
当然,由于移动车位移库到固定库位前各种结构条件的限制,绝大部分立体车库在停车端的“移动车位”无法布置有效的功率电源(线),故而本系统自带有贮备电池电源作为移库前为充电桩与本方案下的主要工作电路提供基础低压工作能源,由于本电源系统的存在,充电桩的非功率供电部分可以无损对接而在电动汽车停车到位后,即可拿出充电枪对接并在充电桩上进行充电操作。就目前市售的充电桩产品结构而言,基本采用的是先进行有益的各种充电前的“预备”操作,待“确定”后才启动对应的“功率供电”回路。鉴于此,倘若充电桩的主功率供电回路处于“无电”状态显然并不影响这些充电桩的本级操作与基本信息传递,仅有一些具备输出监测能力的充电桩会给出一定的“故障”代码之类的提示,而这这并不干涉本文下的系统装置进入下一步工作流程。
特别地,在整个充电管控过程中,基于供电安全和触头刀闸应用可能需要检修的频次考虑,本系统装置在充电送电管控流程中多次反复监测负载断开开关——大功率自保持继电器的当前工作位置状况:触点是闭合状态还是断开状态?以借此获得最大可能的提前断开大功率车负载消除负载电流可能带来的电弧对触点的灼伤甚至电弧的飞溅[28],影响刀闸触头的导电及绝缘性能——进而实现隔离刀闸的无电弧断开及闭合操作。随着移库到位后的位置状态确认,系统装置自动启动各种校正与监测并给出故障信息提示,在需要时按设定的条件通过物联网组件对外发送资讯。
2.2 位置确认控制
自动或手动型隔离开关因其灵活的组装结构与检修方式在接触网供电系统应用较为广泛,也正是其运行安装环境等因素的影响,隔离开关的传动、导电部分会因卡滞、变形、移位等原因出现刀闸不能正常合分的现象[29]。结合本系统的应用与结构需要等特点,为确保选用的隔离开关的刀闸能有效进入既有的工作状态并结合当前已知的公开文献提出的各种状态监测系统[22-23,30]功能后,采用如图4所示的主要确认流程来实现必要的动静触头之间因为车位与库位之间的不确定性“配套匹配”使用带来的位置误差并完成自主校正与故障反馈判断。
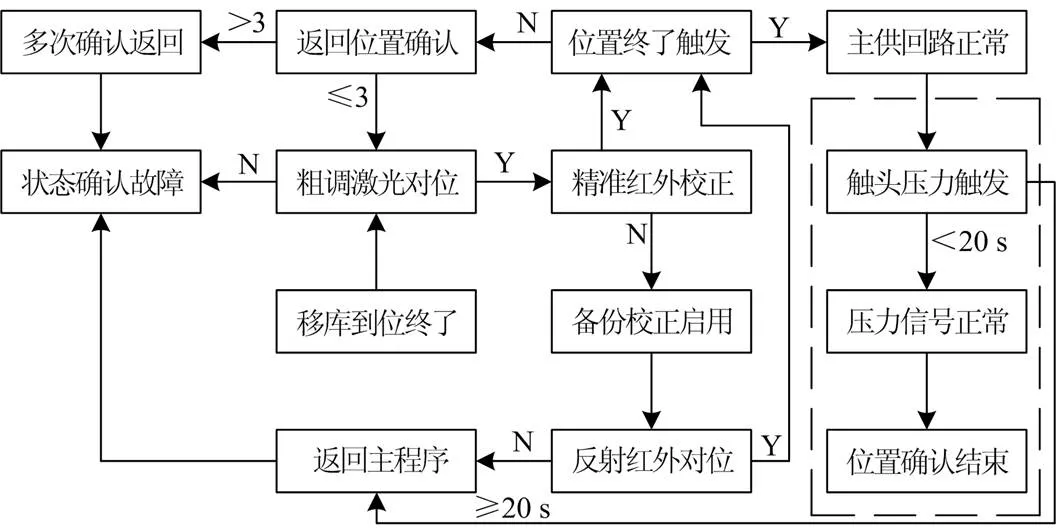
图4 位置确认流程
本文所提出的位置确认管控流程是基于立体车库中可移动车辆车位端安装的、隔离开关的动刀刀闸与固定在库位端的、静刀刀闸的有效定位与确认来完成的,鉴于移动车位与库位之间的“配套应用”不确定性,也既这里实际应用的“动静触头”刀闸并不是单纯的、隔离开关动静触头刀闸之间存在的“始终对应”关系,而是遵照立体车库管理系统的随机配对应用,故而这里采用了多重位置反复校正和状态向量判断。基于非直接“配对”的动静触头管控的需要,系统装置在移动端组合了激光反射位置校正单元、红外线U性槽小面积挡板阻挡式定位校正单元,并考虑实际校正中可能出现不可预见的单一U槽检测位移变形带来的整体位置失误设置了一个后备补充功能单元。
位置确认管控以待充电汽车所在的移动端车位到库终了位置信号为辅助启动运行条件。因为是辅助触发信号,显然,倘若到达的车位上并不是需要充电的对象时,即便到库终了信号到达,这部分程序也不会独自执行,虽然本功能是嵌入在整体系统中可独立运行的功能单元,但是这一程序并不独立于是否需要充电的主程序之外运行。且当激光与红外校正运行完毕后,本程序还将继续等待系统返回的主供电回路已经准备好的信息,以进一步确认之前运行的动静触头刀闸“对齐”是不是满足供电条件,进而再次监测由动触头合闸到位、动静触头两者“咬合”后带来的“压力”信号是不是正常,只有这个信号也能正常给出时,主控系统才会给出“位置确认”完毕的信息。这其中,考虑到系统运行的其他因素,位置确认收集压力信息反馈的时间给出了不超过20s的时间间隔余量,确保压力信息反馈前有足够的刀闸机械运行中间过程时间。
3 结语
本文所述系统装置在立体车库充电桩的布局应用技术中是一种用户友好型便捷运维与安全应用的全新系统装置。本系统装置面向的是直接的运营维护管理用户,也即常规立体车库运营用户可以自由选择充电桩供应商,而不是通过立体车库捆绑亦或者是基于车库应用而设计的。显然,对于运营用户而言,车库的后期运维管理更容易独自实现而不是“独此一家别无分店”。同时,由于本系统装置的绝大部分功能组件运行在车库的“移动端”,对应的库位上的布置功能组件仅仅是一个带有安全保护罩的“静触头”组件而已,完全可以考虑“全库”安装而没有太多的成本压力。再者,这里使用的动静触头导电刀闸组件来自低压配电设备的主要功能件,运营用户完全可以考虑自主采购与更换,大大提高了用户后期的维护便捷性。更有益的是,本系统设计时已经充分结合当前配电终端实施物联网技术设计组合,对应智能化信息需求[26,31],用户可在收到本系统给出的相关可能性故障代码后,自主判定检修的针对性与经济效益性。更为立体车库在新能源车辆整体数量增加时、传统车位能否与电动汽车相互便捷性兼容,运营用户能否结合当前既有资产进行有效的整合后进行升级改造提供极大的技术选型可行性、新建或基于部分新能源车库位的功能提升而不是全库可移动车位一次性进行充电桩布置建设提供良好的兼容性选择方案。
[1] 和淼. 基于时间最优控制的立体车库控制系统设计[D].唐山: 华北理工大学, 2019.
HE Miao. Design of stereo garage control system based on time optimization control[D]. Tangshan: North China University of Science and Technology, 2019.
[2] 陈佳斌. 自动化立体车库布局设计及调度优化研究[D]. 兰州: 兰州理工大学, 2019.
CHEN Jiabin. Research on layout design and scheduling optimization of automated stereo garage[D]. Lanzhou: Lanzhou University of Technology, 2019.
[3] 杜景泽. 基于人机工程学的无避让立体车库优化设计[D]. 济南: 山东建筑大学, 2020.
DU Jingze. The optimization design of the three-dimensional garage without avoidance based on ergonomics[D]. Jinan: Shandong Jianzhu University, 2020.
[4] 孙美玲, 王志忠. 无线充电共享电动车立体车库设计[J]. 通信电源技术, 2020, 37(8): 73-75.
SUN Meiling, WANG Zhizhong. The design of shared E-bike garage of wireless charging[J]. Telecom Power Technology, 2020, 37(8): 73-75.
[5] 段少伟. 具有电动汽车充电功能的升降横移式立体车库研究[D]. 西安: 西安工程大学, 2019.
DUAN Shaowei. Study on the lift-sliding stereo garage with electric vehicle charging function[D]. Xi’an: Xi’an Polytechnic University, 2019.
[6] 王军利, 陈凯, 王超. 立体车库充电安全研究[C] // 中国重型机械工业协会停车设备工作委员会, 中国停车产业论文集, 2020.
[7] 丁锐. 智能立体车库电动汽车自动充电的实现分析[J].环球市场, 2020(4): 322-323.
[8] 深圳市惠车智能科技有限公司. 一种立体车库的充电系统及立体车库: 中国, CN201921169279.0[P]. 2020-05-12.
Shenzhen Huiche Intelligent Technology Co., Ltd. Stereo garage's charging system and stereo garage: China, CN201921169279.0[P]. 2020-05-12.
[9] 福建森达电气股份有限公司.立体停车库充电连接装置: 中国, CN201922491529.9[P]. 2020-07-21.
[10]深圳市华智联科技有限公司. 一种立体车库充电桩插接装置: 中国, CN201910525745.2[P]. 2019-08-16.
[11]北京大智伟业科技有限公司.一种立体车库充电电源自动插接装置:中国, CN201910678087.0[P]. 2019-09-20.
[12]四川五新智能设备有限公司.一种基于立体车库为新能源车充电的连接装置: 中国, CN201711354240.1[P]. 2018-05-18.
[13]中兴新能源汽车有限责任公司, 深圳市中兴新能源汽车科技有限公司. 自动插接充电装置、智能立体车库及充电方法: 中国, CN201610277783.7[P]. 2017-04-12.
[14]高道港, 邱峰, 孙迎丽, 等. 一种立体式电动车智慧充电停车库的研发[J]. 汽车实用技术, 2020(8): 245-247.
GAO Daogang, QIU Feng, SUN Yingli, et al. Research and development of a three-dimensional electric vehicle smart charging parking garage[J]. Automobile Technology, 2020(8): 245-247.
[15]段少伟, 陈永当. 基于立体车库电动汽车无线充电设施的研究[J]. 机械工程与自动化, 2019(2): 8-10.
DUAN Shaowei, CHEN Yongdang. Research on wireless charging facilities of electric vehicle based on stereo garage[J]. Mechanical Engineering & Automation, 2019(2): 8-10.
[16]崔英刚, 张梦婕, 李阳, 等. 立体车库和充电设施集成研究[J]. 科技成果管理与研究, 2017(8): 36-42.
[17]李宏刚, 潘景宜. 铁路综合交通枢纽电动汽车充电桩系统设计[J]. 电力系统保护与控制, 2019, 47(19): 152-157.
LI Honggang, PAN Jingyi. System design of charging pile system for electric vehicle in railway comprehensive communication hub[J]. Power System Protection and Control, 2019, 47(19): 152-157.
[18]李洪峰, 李红霞, 陈志刚, 等. 一种新型电动汽车充电桩技术方案探讨[J]. 电力系统保护与控制, 2017, 45(6): 142-147.
LI Hongfeng, LI Hongxia, CHEN Zhigang, et al. Discussion on technology scheme of a new EV charging pile[J]. Power System Protection and Control, 2017, 45(6): 142-147.
[19]费叶琦, 杨文谦, 王力. 立体车库的结构形式与发展探究[J]. 南方农机, 2020, 51(13): 92-93.
FEI Yeqi, YANG Wenqian, WANG Li. Research on the structure form and development of stereo garage[J]. China Southern Agricultural Machinery, 2020, 51(13): 92-93.
[20]彭曙蓉, 黄士峻, 李彬, 等. 基于深度学习分位数回归模型的充电桩负荷预测[J]. 电力系统保护与控制, 2020, 48(2): 44-50.
PENG Shurong, HUANG Shijun, LI Bin, et al. Charging pile load prediction based on deep learning quantile regression model[J]. Power System Protection and Control, 2020, 48(2): 44-50.
[21]郭青龙, 廉世军. 面向储能充电桩应用的双输入变换装置[J]. 电气应用, 2018, 37(1): 60-66.
GUO Qinglong, LIAN Shijun. Novel double-input converter for electric vehicle hybrid energy storage DC charging-pile[J]. Electrotechnical Application, 2018, 37(1): 60-66.
[22]刘子英, 张靖, 邓芳明. 基于BP神经网络的高压隔离开关分合闸监测识别[J]. 电力系统保护与控制, 2020, 48(5): 134-140.
LIU Ziying, ZHANG Jing, DENG Fangming. Monitoring and identification of state of opening or closing isolation switch based on BP neural network[J]. Power System Protection and Control, 2020, 48(5): 134-140.
[23]陈富国, 蔡敏, 赵营, 等. 隔离开关分合闸位置“双确认”技术研究及设计[J]. 自动化技术与应用, 2020, 39(3): 134-139.
CHEN Fuguo, CAI Min, ZHAO Ying, et al. Research and design on the "double confirmation" technology of isolation switchgear opening and closing position[J]. Techniques of Automation and Applications, 2020, 39(3): 134-139.
[24]廉世军, 武建文, 张路明, 等. 基于BTM7752G芯片的智能型电动操作机构控制器的研制[J]. 电工电气, 2014(12): 31-34.
LIAN Shijun, WU Jianwen, ZHANG Luming, et al. Development of electric actuating mechanism based on BTM7752[J]. Electrotechnics Electric, 2014(12): 31-34.
[25]胡道栋, 杨校辉, 克潇, 等. 充电桩群控操作管理单元的设计与实现[J]. 电力系统保护与控制, 2018, 46(20): 135-141.
HU Daodong, YANG Xiaohui, KE Xiao, et al. Design and implementation of charging pile group operation management unit[J]. Power System Protection and Control, 2018, 46(20): 135-141.
[26]何奉禄, 陈佳琦, 李钦豪, 等. 智能电网中的物联网技术应用与发展[J]. 电力系统保护与控制, 2020, 48(3): 58-69.
HE Fenglu, CHEN Jiaqi, LI Qinhao, et al. Application and development of internet of things in smart grid[J]. Power System Protection and Control, 2020, 48(3): 58-69.
[27]郭青龙, 廉世军. 一种充电插头位置监测装置, 中国: CN207559590U[P]. 2018-06-29.
[28]蔡烨凯. 光伏用隔离开关触头装置的研发[J]. 机电元件, 2019, 39(3): 17-21.
CAI Huakai. The research of the contact device for disconnecting switch used in photovoltaic system[J]. Electromechanical Components, 2019, 39(3): 17-21.
[29]陈敏华.一种隔离开关智能监测系统设计探讨[J].电气化铁道, 2019, 30(6): 36-38.
[30]陈富国, 蔡敏, 尹军华, 等. 基于姿态传感的隔离开关位置监测系统设计与实现[J]. 仪表技术与传感器, 2019(3): 101-105.
CHEN Fuguo, CAI Min, YIN Junhua, et. Design and implementation disconnect switch position monitoring system based on attitude sensor[J]. Instrument Technique and Sensor, 2019, (3): 101-105.
[31]华锦修, 史守圆, 程乐峰, 等. 适用于自动需求响应的分体式智能用电测控终端[J]. 电力系统保护与控制, 2019, 47(17): 140-148.
HUA Jinxiu, SHI Shouyuan, CHENG Lefeng, et al. Split-type smart power measurement and control terminal for automated demand response[J]. Power System Protection and Control, 2019, 47(17): 140-148.
Development of power supply adaptive arcless breaking-closing system for stereo garage charging pile
GUO Qinglong
(Green-net New-energy Technology Co., Ltd., Zhuhai 519060, China)
This paper introduces an automatic power supply device system for arcless breaking and closing of power supply isolator for charging pile used in stereo garage. After the charged vehicle that has been connected to the mobile parking space and entered into the state to be charged reaches the effective garage safely and stably, the system uses the correction mechanism to correct the closing and closing position of the disconnector movable switch and the static knife switch on the garage position, and to close automatically, monitor and judge whether the power output circuit starting the charging stake enters the charging state command or not. The system can be moved after the dynamic and static contacts of the disconnector switch are opened, aligned before closing, no load and no arc. This provides a safe and reliable extended application option for the stereo garage to access fixed power supply after the charging vehicle is moved to the garage.
stereo garage; charging pile; disconnector; double confirmation of position; arcless breaking and closing
2020-09-10
郭青龙(1975—),男,本科,高级工程师,从事直流电源与智能电器的研制工作。E-mail: 13326669315@163.com
猜你喜欢
智能计算机与应用(2023年11期)2023-02-28 16:10:50
科学技术创新(2021年14期)2021-05-28 06:18:46
环球市场(2021年13期)2021-01-16 00:28:43
电子制作(2017年2期)2017-05-17 03:54:53
物流科技(2017年2期)2017-03-27 23:38:32
电子测试(2016年8期)2016-07-29 08:28:53
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27 06:31:45
电网与清洁能源(2015年3期)2015-02-28 16:03:29
汽车零部件(2014年10期)2014-11-11 12:25:06
电子设计工程(2014年12期)2014-02-27 11:58:11
