
基于变中心最大熵CQKF 的WiFi/IMU 组合定位方法
2021-10-13 08:45张丽杰郝利军李志宇
导航定位学报 2021年5期
张丽杰,郝利军,李志宇
(1. 内蒙古工业大学 电力学院,呼和浩特 010051;2. 内蒙古机电控制重点实验室,呼和浩特 010051)
0 引言
随着人们对个人位置的关注,个人导航定位的需求逐渐从室外扩展到室内。基于无线保真(wireless fidelity, WiFi)网络的无线定位具有成本低、可实现性强和速度快等优点,但由于WiFi信号不稳定,其无法满足高精度定位需求。以惯性测量单元(inertial measurement unit, IMU)为传感器的惯性导航是一种不依赖于外界信息、也不向外部辐射能量的自助式导航方式,具有短期动态性能好、数据更新率高、可全天侯和全时间工作等优点。利用WiFi 和IMU 在定位中的互补性,可构成精度更高的组合定位系统,近年来基于WiFi 和IMU 的组合定位技术,已成为导航领域的研究热点之一[1]。
滤波估计算法是影响多传感器组合定位精度的关键因素,已有研究人员将卡尔曼滤波(Kalman filter, KF)[2]、容积卡尔曼滤波(cubature Kalman filter, CKF)[3]用于室内组合定位,CKF 具有比KF更高的滤波精度[4]。针对CKF 在非高斯条件下性能不稳定的问题,文献[5]将最大熵(maximum correntropy, MC)准则引入CKF 中,对量测噪声进行实时估计,滤波精度比CKF 更高,但由于MC准则以零中心高斯核函数为基础,对于非高斯噪声且相关熵非零均值的情况,该准则的稳态性下降。为此,文献[6]提出了变中心(variable center,VC)最大熵准则,将其用于自适应滤波算法中,以提高滤波算法的性能。另外,文献[7]将高斯-拉盖尔(Gauss-Laguerre)准则引入CKF 中,提出容积积分卡尔曼滤波(cubature quadrature Kalman filter, CQKF),解决了CKF 在求取径向积分时只保留一阶项导致滤波精度不高的问题。
针对行人室内定位环境复杂、噪声干扰不确定性强的问题,本文提出一种基于变中心最大熵CQKF ( variable center maximum correntropy cubature quadrature Kalman filter, VCMCCQKF)的WiFi/IMU 组合定位方法,将变中心最大熵准则引入CQKF 中,采用VCMCCQKF 先对WiFi 定位结果进行滤波,再对WiFi/IMU 组合系统数据进行融合,以提高定位精度,并用实验验证算法的有效性。
1 WiFi/IMU 组合定位方案设计
本文采用的WiFi/IMU 组合定位系统方案如图1所示。图1 中:AP(access point)为接入点;RP(reference point)为参考点;K-means 为K-均值;WKNN(weighted k-nearest neighbor algorithm)为加权K最邻近算法。定位的精度,通常需要对其定位结果进行滤波。
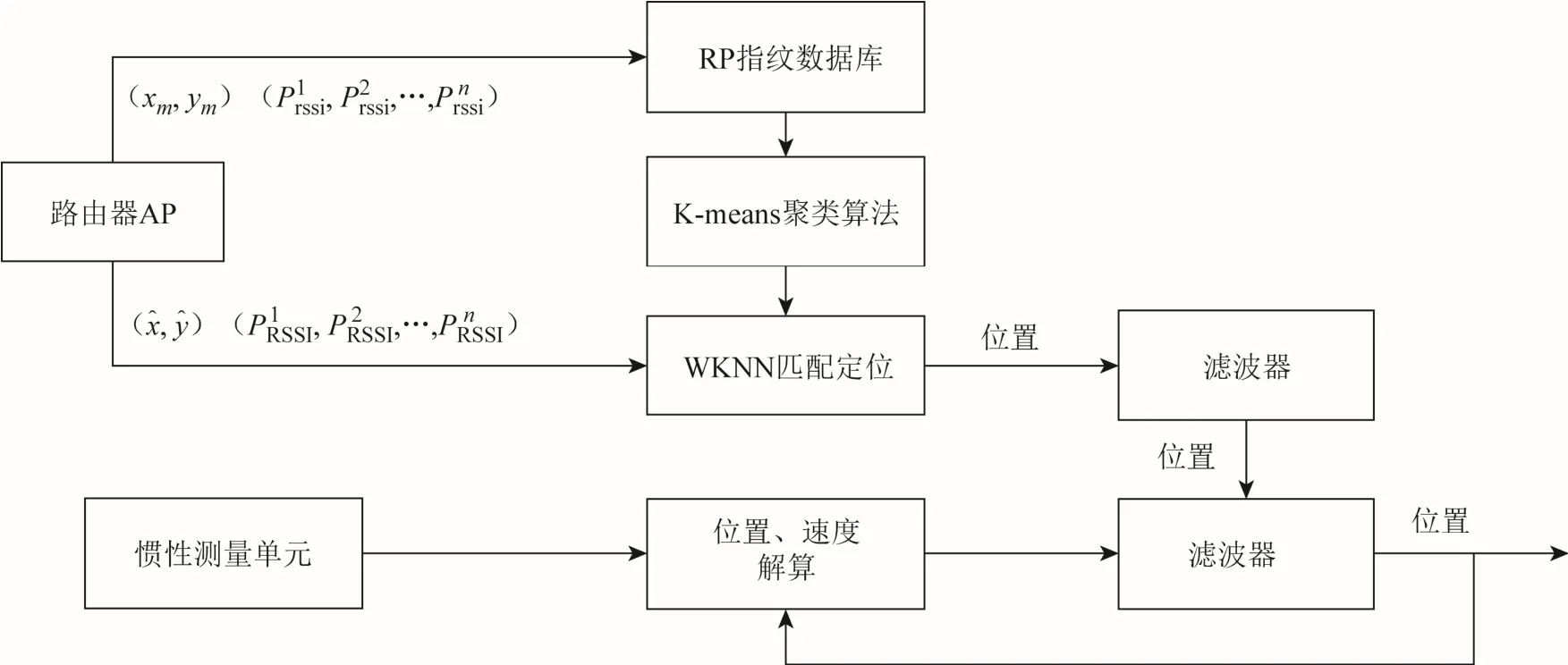
图1 WiFi/IMU 组合定位系统原理框图
在惯性定位子系统中,根据IMU 测量的载体加速度和旋转角速度解算得到位置和速度。
在WiFi/IMU 组合定位系统中,采用滤波器对WiFi 定位结果和惯性定位结果进行融合,将惯性定位系统的位置和速度作为组合系统的状态信息,将WiFi 定位结果作为量测信息,通过估计位置对惯性定位结果进行反馈矫正。
2 系统数学模型
对于图1 所示WiFi/IMU 组合定位系统,系统 状 态 为 载 体 的 位 置 和 速 度 , 即Xk=[x(k)y(k)vx(k)vy(k)]T,系统量测来源于

3 变中心最大熵CQKF 滤波算法设计
3.1 变中心最大熵准则
随机变量X和Y的相关熵表示二者的相似程度,其定义为,

最大熵准则以零中心高斯核函数为基础,针对实际应用中的噪声非高斯且相关熵非零均值情况,定义随机变量X和Y的变中心熵为

式中:e=X-Y;b∈R为相关熵中心位置。
对于相关熵中心不为零的情况,式(7)最大熵准则演变为变中心最大熵准则。
3.2 基于变中心最大熵准则的量测噪声估计

3.3 变中心最大熵CQKF 算法步骤
将基于变中心最大熵准则的量测噪声估计方法引入CQKF,即可得到变中心最大熵CQKF 滤波算法VCMCCQKF。VCMCCQKF 的具体步骤如下:


4 实验
本文采用位置均方根误差(root mean square error,RMSE)评估算法性能,位置均方根误差的定义为

在教学楼一楼部署实验环境,如图2 所示,共部署3 个WiFi 接入点(AP),按0.6 m 间距预定RP,建立的WiFi 指纹数据库中共有312 组指纹信息。在各RP 处分别对3 个AP 采集RSSI 值,且每个RP 的 RSSI 值为10 次采集RSSI 的均值,行人携带手机由东门(起点)行至北门(终点)处,其间通过手机内置传感器采集WiFi 信号的RSSI值和IMU 数据,采集的数据通过手机上传并保存至计算机中,为了验证本文设计的组合定位方案和数据融合算法的有效性,在矩阵实验室(matrix laboratory, MATLAB)中编写定位算法程序,进行了以下2 个实验。

图2 实验环境部署
1)单独系统定位和组合定位对比实验。分别采用WiFi 定位、惯性定位和本文提出的WiFi/IMU组合定位方法获得行人定位结果,定位结果如图3所示,定位平均误差如表1 所示。
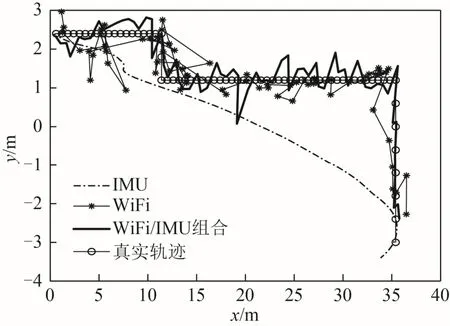
图3 单独系统定位和组合定位对比实验

表1 单独系统定位和组合定位平均误差 单位:m
由图3 和表1 可知,WiFi/IMU 组合定位误差最小,相比WiFi 和IMU 单独定位,WiFi/IMU 组合定位误差分别减少了81%和92%。
2)WiFi/IMU 数据融合算法实验。分别采用CQKF、最大熵CQKF(MCCQKF)和变中心最大熵CQKF(VCMCCQKF)作为WiFi/IMU 组合定位系统的数据融合算法,比较算法的精度、复杂度和收敛性。采用算法迭代一次的时间评价其复杂度,采用算法首次迭代至达到定位平均误差的时间评价其收敛性,定位误差如图4 所示,定位平均误差、收敛时间和运算时间如表2 所示。

图4 基于不同数据融合算法的WiFi/IMU 组合定位误差

表2 不同数据融合算法的性能比较
由图4 和表2 可知,VCMCCQKF 算法的定位误差最小,相比MCCQKF 和CQKF,VCMCCQKF定位误差分别减少了24%和38%;VCMCCQKF 比MCCQKF 和CQKF 的运算时间仅增加了0.014 和0.063 ms;MCCQKF 的收敛性略低于 CQKF,VCMCCQKF 的收敛性比CQKF 有明显提高,其收敛速度是CQKF 的1.78 倍。
5 结束语
为了提高移动目标的室内定位精度,本文提出了一种基于变中心最大熵CQKF 的WiFi/IMU 组合定位方法。该方法以WiFi 信号强度和IMU 测量结果作为数据源,采用变中心最大熵CQKF 滤波算法对WiFi 定位结果进行滤波和对WiFi 和IMU数据进行融合。实验结果表明:提出的变中心最大熵CQKF 比最大熵 CQKF 和CQKF 具有更高的滤波性能,采用基于变中心最大熵 CQKF 的WiFi/IMU 组合定位方法能够有效提高移动目标的定位精度。另外,相关熵的中心表征了两个随机变量的相似程度,将其用于量测噪声估计问题,则体现量测噪声的大小,相关熵的中心值变化越大,说明量测噪声的波动越大,因此可实时估计量测噪声均值,进而实时调整相关熵中心值,进一步提高算法的自适应性。
猜你喜欢
农业工程学报(2022年10期)2022-08-22
舰船电子工程(2022年6期)2022-08-02
中国注册会计师(2021年10期)2021-11-22
小天使·二年级语数英综合(2019年4期)2019-10-06
计算机应用(2016年10期)2017-05-12
电影故事(2015年16期)2015-07-14
消费导刊(2014年12期)2015-02-13
读与写·教育教学版(2009年11期)2009-06-17
西安交通大学学报(2009年12期)2009-02-08
