基于过程模型约束的轨迹乱序事件修复方法
2021-10-11 13:09闻立杰邓雅方王建民
计算机集成制造系统 2021年9期
王 琦,闻立杰,邓雅方,钱 忱,王建民
(清华大学 软件学院,北京 100084)
0 引言
随着企业信息化的推进,海量的日志数据源源不断地从企业信息系统中产生,促进了信息挖掘领域的发展。与此同时,日志的完备性一直是备受关注的问题,由于系统原因或者人为原因,常常会导致系统日志中的时间信息错误,使得日志数据无法正确表达业务活动之间的次序关系,增加了信息挖掘的难度。此类可以表达活动之间相对次序关系的日志被称为轨迹日志。针对轨迹日志的乱序问题,业内提出了许多修复的手段用来提升日志质量。
目前,基于模型约束的轨迹对齐是主要的修复方式,LEONI等[1]最早提出利用流程模型和日志轨迹对齐修复日志的方法,可以对日志中存在的多种问题进行修复,然而此类修复方法的时间效率表现较差;为了提升对齐算法性能,业界学者提出一种分治的策略,将大规模流程模型分解为易于分析的子流程模型集,大大提升了算法性能[2];在分治的基础上,SONG等[3]利用剪枝规则,进一步提升了对齐修复方法的性能。
此外,基于启发式的轨迹修复方式Effa[4],虽然获得了良好的性能表现,但是修复准确率有待提高。针对轨迹修复问题,ROGGE-SOLTI[5]等提出结合随机Petri网、对齐和贝叶斯网络来实现轨迹修复的方法。有学者提出了修复轨迹缺失事件的分支定界修复方法[6],还有基于时间约束网的乱序轨迹修复方法等[7]。
针对上述问题,本文围绕轨迹乱序问题展开研究,提出乱序轨迹的高效修复方法,主要贡献如下:
(1)首先对轨迹乱序问题的最优修复进行了形式化定义,并提出了基于移动距离的修复代价函数。
(2)提出一种基于A*算法的乱序轨迹修复方法,通过将轨迹与流程模型进行对齐,来寻找乱序轨迹的最优修复。
(3)提出一种基于精炼流程结构树的乱序轨迹修复方法,通过模型分解技术,将原始模型分解为多种不同类型的子结构,然后通过事件重放算法对模型子结构进行修复,修复效率获得了明显提升。
(4)设计了实验对本文提出的两种修复方法进行测试分析,并与业内主流修复方法进行了对比实验。
1 预备知识和问题定义
1.1 预备知识
本文以乱序轨迹日志的修复为主要目标,本节将对研究内容所涉及的预备知识进行说明,主要包含建模语言的选择和流程模型的定义。
定义1轨迹。轨迹是多个活动的非空有序集合,实际发生的活动在轨迹中称为事件。
本文使用Petri网作为主要建模语言[8],Petri网是由Carl Adam Petri设计发明,用来描述非同步的因果和非因果行为的表达。
定义2Petri网。一个Petri网N是一个三元组(P,T,F),其中:P为有限的库所集合;T为有限的变迁集合,且P∪T≠∅∧P∩T=∅;F⊆(P×T)∪(T×P),为有向边集合(即流关系);对于任意节点x∈P∪T,·x={y|(y,x)∈F},x·={y|(x,y)∈F}。
定义3流程模型。一个Petri网N=(P,T,F)是一个工作流网,当且仅当下列条件同时成立:①有且仅有一个输入库所i∈P(源库所)满足·i=∅;②有且仅有一个输出库所o∈P(汇库所)满足O·=∅;③任意节点x∈P∪T都在源库所到汇库所的某一条路径上。
定义4前序集合和后序集合。对于一个流程模型N=(P,T,F),σ为对应的触发轨迹,任意事件e∈σ,*e表示事件e的前序事件集合,包含从轨迹的开始事件到当前事件e之间的所有事件。e*表示事件e的后序事件集合,包含从当前事件e到轨迹最后一个事件之间所有的事件。
1.2 问题定义
轨迹的乱序问题是指轨迹中事件的相对顺序存在错位。在乱序轨迹修复过程中充满了不确定性和多样性,同一乱序轨迹存在多种修复方式和不同修复结果,为了量化轨迹修复过程中事件移动的代价,并提供一种对修复结果评价地方式,提出了基于位置的移动距离代价函数。
定义5位置映射函数。给定一个事件日志轨迹σ,σ可以被等价地转换为位置映射函数πσ,其中πσ关联事件和位置信息,即∀e∈σ,πσ(e)=k,其中k为事件e的位置信息。
轨迹中事件的位置分为两种类型:①在未修复的原始轨迹中,一个事件的位置信息对应该事件在轨迹中的索引下标,从1开始逐一递增至轨迹长度,即1~|σ|;②间隙位置,间隙位置k(x)就表示位于初始位置k和k+1之间的第x个事件。对于一条待修复轨迹σ=

事件的移动将伴随着位置的修改,将轨迹修复前后事件位置的变化定义为轨迹的修复代价。
定义6移动距离(MD)。原始待修复轨迹σ的位置映射函数为πσ,修复轨迹σ′对应位置映射函数为πσ′,将修复的代价定义如下所示:
MD(σ,σ′)=∑t∈σ|πσ(t)-πσ′(t)|。
本文使用移动距离衡量原始待修复与修复轨迹之间的差异大小,最优修复轨迹定义如下。
定义7最优修复。对于过程模型N=(P,T,F) 的一个日志轨迹σ,最小修复轨迹σ′需要满足如下条件:
(1)σ′|=N;
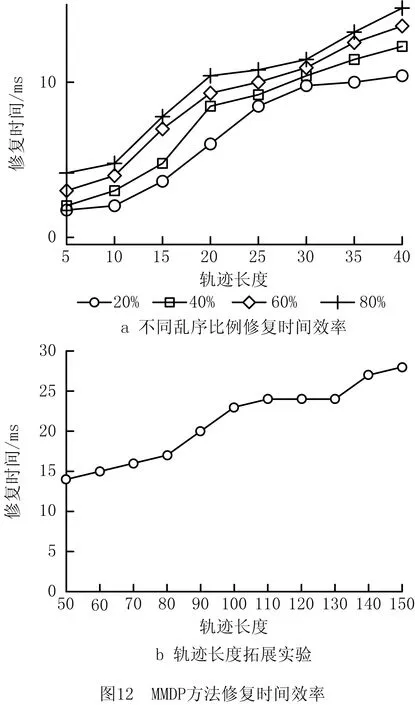
(2)MD(σ,σ′)最小,当且仅当不存在修复方案σ″,使得MD(σ,σ″) A*(A Star)算法最早由Hart等[9]提出,被认为是最著名的人工智能算法之一。过程挖掘领域常用A*算法在搜索空间内寻找最优解,A*算法是基于启发式的路径搜索算法,可以在静态网络中搜寻最小路径。目前该算法已经用于解决各个领域的问题,例如DNA序列的比对、智能路径规划以及物联网智能流量等[10-13]。 本文提出的基于A*算法的乱序轨迹修复方法(Minimum Moving Distance repair using A*,MMDA)由轨迹事件优先级分析和解的搜索空间遍历两部分组成,修复方法的流程描述如图2所示。 MMDA方法在修复过程中,通过调整轨迹事件的相对位置,获得无错位事件的轨迹。为识别和修复轨迹中的错位事件,需要分析模型中的约束信息,判断轨迹中两个事件之间的相对顺序是否发生错位。 流程模型中的约束关系决定了变迁节点之间的触发顺序,本文将变迁节点的触发先后次序关系定义为变迁优先级,定义如下: 定义8变迁优先级。给定一个无环流程模型N=(P,T,F),模型的开始节点为b_start,结束节点为b_end,∀t1,t2∈T,m(t1)和m(t2)分别表示变迁t1和t2在流程模型N中的变迁优先级,F(t1,t2) 表示从t1开始到节点t2之间所有路径包含的变迁集合,变迁优先级遵循如下规则: (1)m(t1)>m(t2),如果满足t2∈F(t1, b_end),或者t1∈F(b_start,t2); (2)m(t1) 如图4所示,如果流程模型内部包含循环结构,将存在若干条从后向前的反向边,在分析变迁优先级时,需要将循环结构进行展开操作,总是将L2中变迁优先级小于L1中的变迁优先级,L3结构中变迁优先级小于L2中的变迁优先级,即∀t0∈L0,∀t1∈L1,∀t2∈L2,∀t3∈L3,满足m(t0)>m(t1)>m(t2)>m(t3)。 轨迹中每个事件都是由对应的模型变迁节点触发生成,通过分析模型变迁节点的触发次序,进而可以推断轨迹中事件的生成顺序,首先给出事件优先级的定义。 定义9事件优先级。给定一个日志轨迹σ,∀e∈σ,d(e)表示事件e的事件优先级。∀e1,e2∈σ,事件优先级表示事件的触发生成次序先后关系: (1)若d(e1)>d(e2),表示事件e1在模型中的触发生成次序早于事件e2; (2)若d(e1) (3)若d(e1)=d(e2),表示在模型中对事件e1和e2之间的触发次序无要求。 通过将轨迹事件与模型变迁进行一一映射,获得事件优先级信息。对于仅包含串行、互斥分支和并行结构的流程模型,使用同名映射方式,t=φ(e)表示与事件e同标签名的变迁节点t。 规则1普通事件优先级比较规则 给定一个无环流程模型N=(P,T,F)和对应的日志轨迹σ,∀e1,e2∈σ,则事件优先级的比较遵循以下规则: (1)若m(φ(e1))>m(φ(e2)),则事件优先级满足d(e1)>d(e2); (2)若m(φ(e1)) 如图3所示的流程模型,对于一个待修复轨迹σ= 如果模型中包含循环结构,轨迹中会包含多个同标签的事件,需要按照循环次数进行切分,从而区分多个同标签事件。如图5所示包含循环结构的流程模型,给定一个待修复轨迹σ,按照事件在轨迹中的出现顺序,将循环事件切分为S1和S2两部分,属于循环触发S1中的事件优先级一定大于属于S2中的事件,即∀e1∈S1,e2∈S2,满足d(e1)>d(e2)。 给定一个日志轨迹σ,如果修复后的轨迹σ′,满足:∀0 为了使用A*算法寻找最优修复,需要定义一个合适的搜索空间,搜索空间中的节点代表修复的过程,原轨迹作为初始节点出现在搜索空间中,空间中相连的两个修复节点代表修复过程的连续性,每一个部分修复轨迹经过一次修复,都可能生成多个新的轨迹,将轨迹的修复操作定义如下: 定义10错位事件修复函数。给定一个流程模型N=(P,T,F),对于一条部分修复轨迹σ,∀e1∈σ,错位事件修复函数ad(e1,σ)表示以事件e1为基准,调整轨迹中的错位事件,生成新的轨迹,调整规则如下: (1)∀e2∈*e1,且d(e2) 通过连续的调用错位事件修复函数,可以渐进性的对待修复轨迹进行修复;同时,以不同的事件作为参数调用修复函数,可以生成不同的新轨迹,对应不同的修复分支。如图3所示的流程模型,给定对应的一个待修复轨迹σ= 如果修复后的新轨迹是一条完全修复轨迹,则暂存当前修复轨迹和对应的修复代价。因为修复的多样性,在生成修复分支的过程中,将获得多个不同的完全修复轨迹和对应的修复代价,根据最优修复的定义,选取修复代价最小的一条完全修复结果作为最优修复。 除此之外,待修复轨迹修复遍历的过程中,会出现许多等价的部分修复轨迹,如图6中所示,通过ad(T2,σ)和ad(T3,σ)修复后得到的新轨迹是等价的,即轨迹中对应事件的顺序完全一致,为了加速遍历算法,对于等价的轨迹,只保留修复代价(移动距离)较小的轨迹即可。 代价预估启发式是A*算法的重要组成部分,A*算法会维护一个优先级队列,在修复过程中,将所有部分修复轨迹加入到队列中,其中预估修复代价越小的部分修复轨迹,在队列中优先级越高,越容易被优先修复。理想情况下,通过优先级队列和代价预估启发式,A*算法能够优先获得修复代价最小的修复结果,并且将后续预估代价较大的修复分支进行修剪。 对于一个待修复轨迹σ,假设轨迹的修复预估代价为LHσ,实际修复代价为MDσ,为了获得预估修复代价的计算方式,首先可以对流程模型中的两个相邻变迁节点进行分析。给定一个流程模型N=(P,T,F),模型N的任意两个相邻变迁节点x和y,满足y∈(x·)·,将存在以下几种情况: 情况1∃i 情况2∃i (1)将σ(i)移动到σ(j)之后,如图7b所示,y′为y的新位置,事件修复的移动代价为Costij=j-i; (2)将σ(j)移动到σ(i)之前,如图7c所示,x′为x的新位置,事件修复的移动代价为Costij=j-i; (3)σ(i)和σ(j)同时移动位置进行修复,如图7d所示,事件x和y同时向中间的某个事件位置k进行移动,事件修复的移动代价为Costij=(j-k) + (k-i)=j-i;如图7e所示,事件同时向y左侧的某个事件位置k进行移动,则事件修复的移动代价Costij≥j-i;同理如7f所示,也满足Costij≥j-i; 按照上述的分类讨论得知,不管如何修正事件错位问题,都有Costij≥j-i。 情况3不存在i 由上述讨论可知,对于模型中的两个相邻变迁x和y,只要其对应的事件相对顺序错误,其修复代价一定大于其位置差值的绝对值。同时,为了防止最终预估的代价超过实际修复代价,同一个模型变迁及其对应的轨迹事件在代价预估的过程中,应该仅被使用一次,因此提出后继二元集的定义。 定义11后继二元集。给定一个流程模型N=(P,T,F),后继二元集(Subsequent Binary Set,SBS)是一个二元组的集合,其中∀(x,y)∈SBS满足如下条件: (1)x∈T,y∈T,并且y∈(x·)·; (2)不存在其他的一个后继二元组(m,n),使得x或y包含在(m,n)中。 对于部分修复轨迹σ,将其完全被修复所需要的代价称为剩余修复代价,基于上述讨论和后继二元集,下面给出剩余修复代价的预估方式。 定义12剩余修复代价。设函数k(a,b)表示修复事件a和b所需要的预估代价,在此给出剩余修复代价的预估函数 FCσ=∑∀(a,b)∈SBSk(a,b)= FCσ是对修复代价的一种预估值,始终满足0≤Fcσ≤MDσ,即预估剩余修复代价始终小于实际修复代价。对于修复过程中的一条部分修复的轨迹σ′,将其全部的修复代价预估定义如下: LH(σ,σ′)=MD(σ,σ′)+FCσ′。 其中:MD(σ,σ′)是已有的修复代价,FCσ′是轨迹完全被修复所需要的剩余修复代价,两部分修复代价共同构成了轨迹σ′的预估修复代价。在遍历解空间的过程中,已知一个已经产生的修复方案的代价为MDσ′,可以将该方案的修复代价设置为剪枝阈值。对于遍历过程中的任意一个修复节点σ″,计算σ″对应预估修复代价LH(σ,σ″),将预估代价与剪枝阈值进行比较: (1)LH(σ,σ″)≥MDσ′,则该节点最终修复方案的修复代价一定大于MDσ′,可以安全地修剪掉当前分支; (2)LH(σ,σ″) 通过修复代价预估对搜索空间内的无用修复分支进行修复,从而加速修复算法的时间效率表现,基于A*算法的乱序轨迹修复方法的实现如算法1所示。算法第1行首先声明一个优先级队列Q,内部存放轨迹和位置信息的二元组;第3行表示每次从队列Q中选择一个预估代价最小的部分修复轨迹进行修复;第7行表示调用错位事件修复函数生成新轨迹;第8行表示修复后的轨迹符合模型约束,始终保留修复代价最小的修复结果;第11行表示新轨迹中仍然存在乱序问题,加入到队列Q中;最后返回最优修复结果。 算法1基于A*算法的乱序轨迹修复方法。 输入:工流程模型Ns、待修复轨迹σ及其位置映射函数πσ; 输出:最小修复方案σmin和位置映射函数πmin。 1 Q:={(σ, πσ)},(σmin,πmin):=NULL 2 while Q≠∅ do 3 (σ,πσ′):=argmin(σ′,πσ′)∈QLH(σ,σ′) 4 Q:=Q{(σ,πσ′)} 5 ifLH(σ,σ′) 6 foreach e∈ECSσ′do 7 (σ″,πσ″):=ad(e,σ) 8 if (σ″,πσ″)|=Nsthen 9 (σmin,πmin):=Min((σ″,πσ″),(σmin,πmin)) 10else 11Q:=Q∪{(σ″,πσ″)} 12 returnσmin,πmin 基于A*的乱序轨迹修复方法,需要遍历整个解的搜索空间,寻找修复代价最小的修复结果作为最优修复。因此,为了加速修复方法的修复性能,提出一种基于精炼流程结构树的修复方法(Minimum Moving Distance repair using refined Process structure tree,MMDP)。精炼流程结构树 (Refined Process Structure Tree,RPST)最早由Polyvyanyy等[13]提出,是一种流程模型的层次化结构表示,可以将流程模型转换为由多个单入单出子结构表示的树状结构,每个子结构称为组件。MMDP方法流程框架描述如图8所示。 RPST的叶子节点代表了流程模型中的边,在进行轨迹修复前,需要将边转换为变迁节点,转换规则如下: 规则2变迁节点转换规则。 每一个RPST中的叶子节点,都对应流程模型中的一条边,每条边都关联一个变迁节点,若变迁节点只归属于一个组件,则直接转换;若变迁节点同时属于多个组件,则重复归属于多个组件中。 从上到下依次遍历RPST中的每一个组件,对于每个组件中包含的模型变迁节点,需要从轨迹中抽取对应的事件,分离为单独的轨迹片段。给定一个流程定义N,待修复轨迹σ,对应位置映射函数π,对于遍历过程中的一个组件S,分以下几种情况讨论: 情况1S是B组件,B组件同时可以表示互斥分支结构、并发结构和循环结构,细分为以下3种情况处理: (1)S是互斥分支B组件,则S一定包含多个子组件,只需进行子组件的修复即可; (2)S是并发B组件,首先需要将以S为根结点的所有子组件标记为MMDA修复组件,然后进行子组件的遍历; (3)S是循环B组件,使用MMDA方法直接修复S对应的轨迹片段σ′,无需继续向下遍历。 (1)若S除包含组件外,还包含其他组件,需继续向下进行子组件的遍历修复; (2)若S仅包含组件,且没有被标记为MMDA修复组件,则可利用轨迹重放算法修复,如算法2所示; 情况 3S是组件,无需修复,组件内部仅包含一个变迁节点,对应轨迹片段不存在错位问题。 情况 4S是R组件,非结构化部分,使用MMDA修复对应轨迹片段。 对于不同的组件,首先抽取对应的轨迹片段,然后分类别进行修复。轨迹重放算法如算法2所示。第1行定义最终返回的最小修复轨迹,集合history为已经触发过的事件集合;第2行表示遍历模型变迁,进行对比重放;第3~第4行表示跳过已重放事件;第5~第8行表示当前事件σ′(i)可以被重放,然后添加到结果当中;第9~第11行表示当前事件σ′(i)无法被重放,需要从轨迹中寻找一个可以被重放的事件t进行重放;第12行更新当前可达模型变迁;最后返回重放结果。 输入:RPST 组件的开始节点 Ms、结束节点 Me和对应轨迹片段σ′; 输出:最小修复轨迹片段σmin。 1 σmin:=<>, M:=Ms, history:=∅, i:=0 2 while M≠Me do 3 if σ′∈history then 4 i:=i+1 5 if M[σ′(i)>M′ then 6 σmin:=σmin·σ′(i) 7 history:=history∪{σ′(i)} 8 i:=i+1 9 else∃t∈σ′,M[t>M′then 10 σmin:=σmin·t 11 history:=history∪{t} 12 M:=M′ 13 returnσmin 修复后的轨迹片段需要进行合并整合,获得最终的修复轨迹,在合并过程中,不仅需要保持组件内部事件的有序,还要保证组件之间的有序。对于同属一个父节点的两个组件P1和P2,对应修复后的轨迹片段为σP1和σP2,提出以下两种合并方式: (1)交叉合并。轨迹片段σP1和σP2,按照事件位置从小到大进行排列合并,相同位置的事件按照原待修复轨迹中的出现次序排列,并对重复的开始节点和结束节点进行判断去重; (2)追加合并。轨迹片段σP1或σP2,需借助2.1节中的变迁优先级进行合并,子结构P1的开始节点MP1和子结构P2的开始节点MP2,若m(MP1)>m(MP2),则直接将轨迹σP2追加到轨迹σP1之后,否则将轨迹σP1追加到轨迹σP2之后。最后,判断合并组件中,前一个组件的结束节点和后一个组件的开始节点是否重复,进行节点去重。 (2)B组件包含的子组件,使用交叉合并方式合并子组件对应的修复轨迹片段。 实验部分除了本文提出的两种修复方法之外,还将与Effa[4]和对齐Alignment[1]方法进行对比。实验数据主要分为企业流程模型数据集和人工实验数据集两大类。数据集详细信息如表1所示。 表1 实验使用的3种数据集统计信息 基于流程模型,使用日志生成器BeehiveZ生成正确的模型日志轨迹,根据实验要求,使用ProM的DisorderLog插件对轨迹数据进行事件乱序处理。 4.1.1 修复效率实验 如图9所示为修复时间效率对比结果,本实验将超过10 000 ms的修复过程视为超时修复,不再进行最终时间的统计。分析实验结果可得:Alignment方法修复效率最慢,MMDA修复时间效率明显优于Alignment;MMDP方法的修复效率要优于MMDA,说明基于RPST的加速方式起到了明显的效果;此外,基于启发式的Effa修复方法是最快的。 4.1.2 修复精度实验 如图10a所示为因果网数据集最小修复精度对比实验结果,因果网是只包含顺序结构和并发结构的流程模型,其中MMDA,MMDP和Aligament修复精度较高;虽然Effa方法修复速度较快,但是修复精度较低,启发式无法确保修复结果为最优修复。 如图10b所示为包含循环结构的数据集绝对修复精度实验结果,其中MMDA和MMDP方法可以较好地对包含循环结构的乱序轨迹进行修复;Effa方法修复精度最低,这是由于其循环切分规则导致的。在修复过程中,Effa方法会首先选取轨迹中的某个事件作为切分点,然后直接将原始轨迹切分为多个片段,在每个片段内对轨迹进行修复,修复结果的好坏,很大程度上取决于循环切分点的选择。 4.2.1 MMDA方法 如图11a所示为 MMDA方法的时间效率实验结果图,设置了4个轨迹事件乱序比例:20%、40%、60% 和 80%。由实验结果可知,修复方法的性能表现不仅受到轨迹长度的影响,还受到轨迹内事件乱序程度影响。 为了验证等价轨迹检测剪枝规则对修复方法性能的加速作用,进行了如图11b的实验。图中纵坐标轴为修复算法遍历的修复节点总数,由图可知,采用剪枝的修复方法遍历节点数始终低于无剪枝的修复方法,这也证明剪枝规则对修复方法起到了有效的加速作用。 4.2.2 MMDP方法 图12a 所示为 MMDP方法时间效率实验结果图,分别选取了4个不同的轨迹乱序比例:20%、40%、60% 和 80%。相较于图11a,MMDP性能表现更好,因为在遍历的过程中,MMDP避免了大部分分支遍历和分支回滚。除此之外,通过对比图中不同的乱序比例修复曲线,可得 MMDP方法受轨迹乱序比例影响较小。 图12b所示为拓展实验,根据文献[15]的调研结果显示,一般企业级别的流程,上限活动数目为60个,实验中将流程模型变迁节点数量上限拓展为150个,修复方法仍然可在30 ms内完成修复,相较于MMDA方法,性能提升效果明显。 本文提出了基于A*的乱序轨迹修复方法。首先,通过分析模型约束,比较轨迹中事件之间的次序优先级,从而调整轨迹中的错位事件。通过对比多个修复结果的修复代价,选取代价最小的结果作为最优修复。为了进一步提升修复算法的性能表现,提出了基于RPST的加速方式,有效地提升了修复时间效率表现。 本文未来的工作之一是多种轨迹错误类型的联合修复,如轨迹事件的缺失和重复等。另外,无模型约束的乱序轨迹日志修复,也是值得拓展的方向之一。2 基于A* 的乱序轨迹修复方法

2.1 事件优先级分析




2.2 搜索空间的生成与遍历


2.3 代价预估启发式


3 基于精炼流程结构树的乱序轨迹修复方法

3.1 模型分解


3.2 自顶向下的轨迹修复
3.3 自底向上的轨迹合并
4 实验评估

4.1 基于企业数据集实验


4.2 人工数据集实验

5 结束语
猜你喜欢
能源工程(2022年2期)2022-05-23重型机械(2020年2期)2020-07-24装备制造技术(2019年12期)2019-12-25中国粮食经济(2018年12期)2018-12-30中国粮食经济(2018年10期)2018-12-30中国粮食经济(2018年11期)2018-12-27海峡姐妹(2017年12期)2018-01-31人大建设(2017年6期)2017-09-26作文与考试·初中版(2017年12期)2017-04-19太阳能(2015年11期)2015-04-10