
航空电源双向DC-DC控制器设计
2021-10-10 02:57邹浩彦
物联网技术 2021年9期
李 博,邹浩彦
(1.中国航空工业集团公司 第一飞机设计研究院,陕西 西安 710089;2.空装驻西安地区第一军事代表室,陕西 西安 710089)
0 引 言
近年来,随着多电(ME)/全电(AE)飞机[1-4]概念的提出,液压能和气压能逐渐被电能替代。原先由液压和气压驱动的装置转为由电能驱动。电能的广泛使用,对飞机电源系统容量提出更大的要求,例如B787的电功率[5]达到了1.4 MW。双向DC-DC变换器[6-8]作为ME/AE飞机电源系统电能转换的重要部件,对ME/AE的发展具有重要意义。同时,其具备高可靠性,高转换效率以及较小体积的优点。但由于系统中负载的多样性和环境不确定性等因素,对变换器的稳定运行(例如输出电压纹波增大等)造成负面影响。文献[9]以控制变换器输出电压为目的,设计了基于Super-Twisting(ST)滑模算法的Buck-Boost电路控制器,在输入电压和输出负载大扰动下,获得满意的性能。
本文针对双向DC-DC变换器自身特点,设计了基于ST算法的电流内环+电压外环的双闭环控制器,并给出了电路参数计算和控制器设计方法,同时实验证明该变换器在双闭环控制算法下,系统具有更好的响应速度和鲁棒性。
1 双向DC-DC变换器工作原理
图1为一种航空电源系统的组成结构,双向DC-DC变换器的作用为母线通过双向DC-DC变换器向蓄电池充电(正向);紧急情况下,蓄电池通过变换器放电(反向)以保证重要机载用电设备正常工作。
双向DC-DC变换器拓扑为一半桥式双向DC-DC电路。其工作在正向(Buck)模式下的工作阶段分解如图2所示;工作在反向(Boost)模式下的工作阶段分解如图3所示。

图2 正向模式下的工作阶段

图3 反向模式下的工作阶段
图2、图3中:当S2工作S1截止时,电路中的能量流动方向为U1至U2;当S1工作S2截止时电路中的能量流动方向相反。经过分析可知,S1和S2互补导通,且U1,U2间关系相同,变换器可逆性良好;且可实现平面坐标系下的两象限运行。
2 控制器设计
由ST算法理论可知,ST由两部分组成:滑模面是时间上的积分;滑模面是一个连续函数,即:

当满足 α>H/KM,λ2>2(αKM+H)/KM,0<ρ≤ 0.5,ST 有限时间收敛于滑模面原点,其中,α,ρ,H,λ均为正常数。又因ST不需要任何有关滑模面在时间上的微分信息,若ρ=0.5,则系统将最大可能实现二阶滑动模态[9-11]。控制策略框图如图4所示。
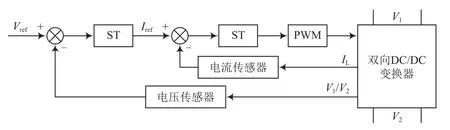
图4 控制策略框图
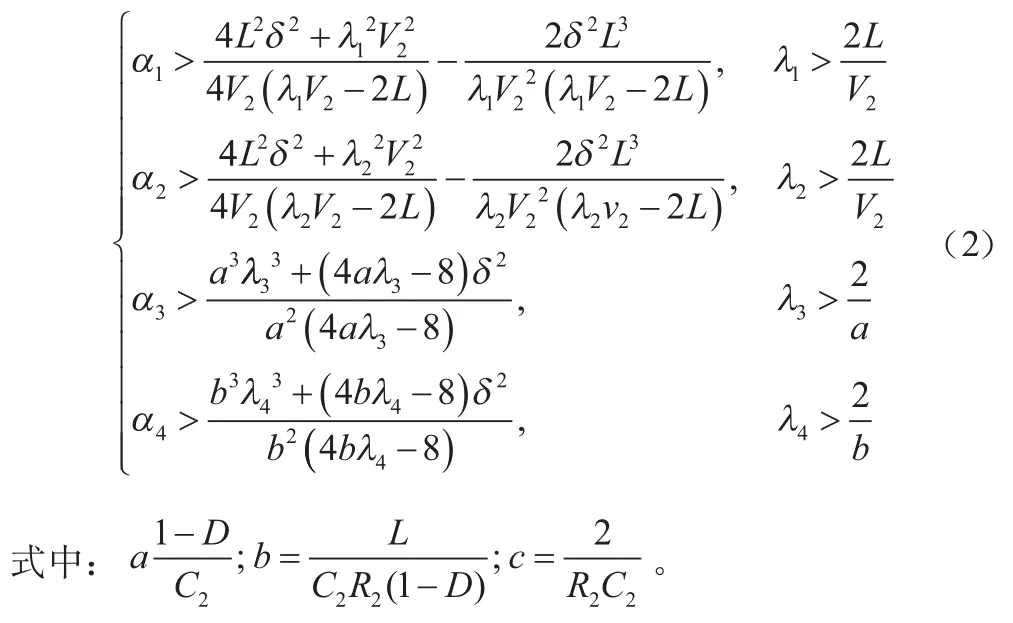
取电流内环滑模面s1,2=iL-Iref,电压外环滑模面s3,4=V1,2-Iref。由李雅普洛夫稳定性判据分别进行稳定性分析,可知当满足式(2)时,系统是渐进稳定的。
3 系统参数设计
变换器设计要求见表1所列。

表1 变换器参数
3.1 MOSFET选择
根据表1的电路参数,开关管开关频率为40 kHz、最大需要承受电为120 V、电流为25 A,择型号为IRFP4768PbF的N沟道增强型MOSFET。
3.2 电感设计
3.3 电容设计
4 试验结果分析
4.1 程序设计
图5给出了PWM信号中断程序流程。在i时刻ePWM1和ePWM2计数器同时开始计数,并触发ADC转换信号,i~i+1时刻间,共采样10次并处理,同时在i+1时刻更新占空比输出2路带死区的互补PWM。

图5 PWM程序流程
4.2 实验结果分析
选 取 控制器参数 α1, α2, α3, α4分别为 100,100,500,501 ;λ1, λ2, λ3, λ4分别为 0.15,0.11,6,1.28。实验平台主要由上位机(CCS9.0)、可编程直流电源、电子负载、双向DC/DC变换器和DSP28335控制电路等组成,如图6所示。
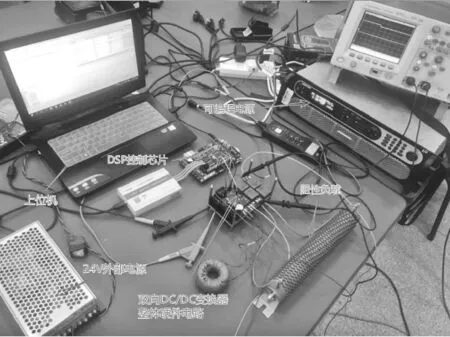
图6 实验平台
图7、图8分别为Buck、Boost模式实验结果分析。由图7和图8可知,ST双闭环算法具有良好的启动性能,系统响应时间端、曲线平滑;负载/电源扰动下,输出电压保持不变,系统鲁棒性好。
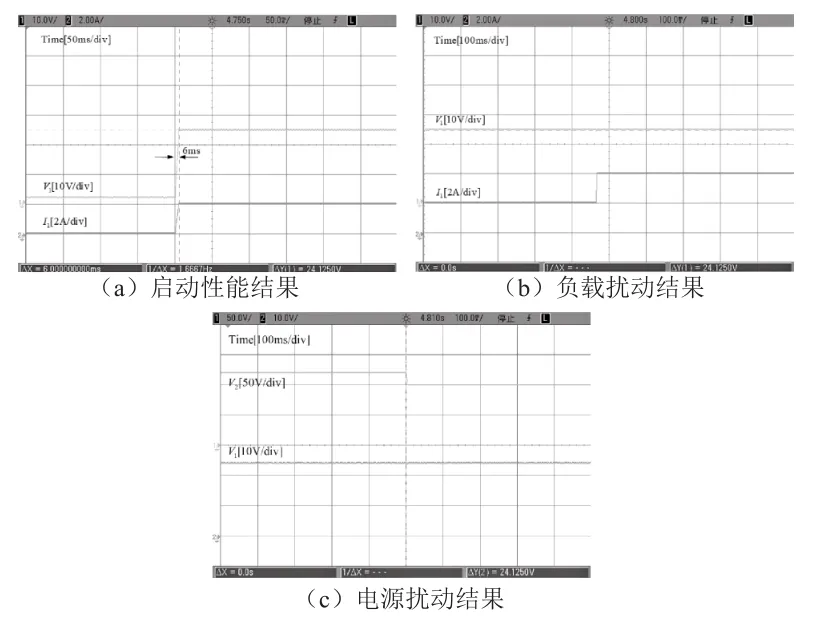
图7 Buck模式实验结果

图8 Boost模式实验结果
5 结 语
本文针对半桥式双向DC/DC变换器在电源/负载扰动下的非线性问题,设计了基于ST算法控制器,确定了控制框图,并在不同模式下对系统的启动、电源/负载扰动情况下的性能进行考核。结果表明系统能实现能量双向流动,系统纹波小、动态响应速度快、鲁棒性强。
猜你喜欢
阅读(快乐英语高年级)(2019年2期)2019-09-10
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
通信电源技术(2016年5期)2016-03-22
消费者报道(2016年3期)2016-02-28
风能(2016年12期)2016-02-25
电源技术(2015年9期)2015-06-05
河南科技(2014年19期)2014-02-27
华东理工大学学报(自然科学版)(2014年6期)2014-02-27
