一种零中频二次雷达直流偏置补偿算法
2021-10-08 00:44刘永刚杨见邹亮
中国新通信 2021年16期
刘永刚 杨见 邹亮

【摘要】 基于零中频架构的优势以及随着科学技术的不断发展带来的新工艺的突破,零中频方案的应用也越来越成熟,但是,其存在的一些问题并没有随着技术的发展而消除,本文针对零中频架构存在的直流偏置问题提出一种处理方法,并通过实际的工程应用进行验证。
【关键词】 零中频技术 直流偏置 二次雷达
引言:
零中频(ZIF)架构自无线电初期即已出现,该架构具有最低的成本、最低的功耗和最小的尺寸等优势。随着科学技术的发展,通过工艺、设计、分区和算法的组合可以解决零中频架构早期存在的诸多普遍性缺陷,带来的新产品取得了性能上的突破,能够实现传统技术望尘莫及的新型应用,不可避免的,零中频架构也存在一些问题,包括闪烁噪声(1/f)、直流偏置(DC-offset)、I/Q不平衡、偶次谐波等。
零中频接收机转换射频信号到零中频,大量的偏置电压会恶化信号,更严重的是,直流偏置信号会使混频后级饱和、信号失真等。
一、本振泄露
本振泄漏在I或Q信号路径中表现为增大的直流失调。其原因是LO直接耦合至射频信号路径中,并被以相干方式下变频至输出。结果产生混频器积,表现为直流失调,加入信号链里存在的任何残余直流失调中,如图1所示。
本振口、混频器口与LNA之间的隔离度不好,本振信号、环境电磁干扰信号等可以直接通过LNA和混频器,这种现象即本振泄露,是由于芯片内部的电容及基底耦合的,耦合的本振信号、干扰信号经过LNA到达混频器,和输入的本振信号混频(自混频),这样会在低通滤波器之后产生直流成分;
近似的情况如(b),从LNA出来的信号、干扰信号耦合到混频器的本振输入口,从而产生了直流分量。
二、传统的直流偏置处理方案
消除直流偏置的方法包括通过算法校准、利用解调芯片校准补偿接口对数据进行补偿的方式以及两者相结合的方式等。
2.1盲校法
具有代表性的,TI公司的盲校法如下:
直流累加:
更新直流偏置:
直流偏置更新统计:
直流偏置补偿:
2.2解调芯片自校准
利用解调芯片自校准接口进行补偿的方式如图2所示。
基带信号中携带的直流偏置可以通过在时域上对数据求均值获得,输入数据与均值相减即完成消直流的过程。有一点不可忽略的是数据中会存在大量信号,包括有用信号以及干扰信号,其功率会远远超过噪声的功率,若不将输入数据中的信号进行剔除,全部当作噪声处理求直流偏置,输出数据会出现失真等问题。
三、基于FPGA的实时补偿
本文主要应用与二次雷达系统,故根据二次雷达系统中噪声、信号的特性,建立相应的模型。
设计一种数据甄别滑窗,对输入数据的类型(噪声、信号)进行识别,准确提取出基带数据中I/Q路携带的直流偏置并实时消除,提升设备的可靠性、稳定性。
二次雷达系统接收通道基带数据中噪声模型:
加性高斯白噪声可定义为二次雷达设备接收通道基带信号中噪声的数学模型,其正交分量nI(t)和nQ(t)是不相关的零均值高斯噪声,具有相等的方差。
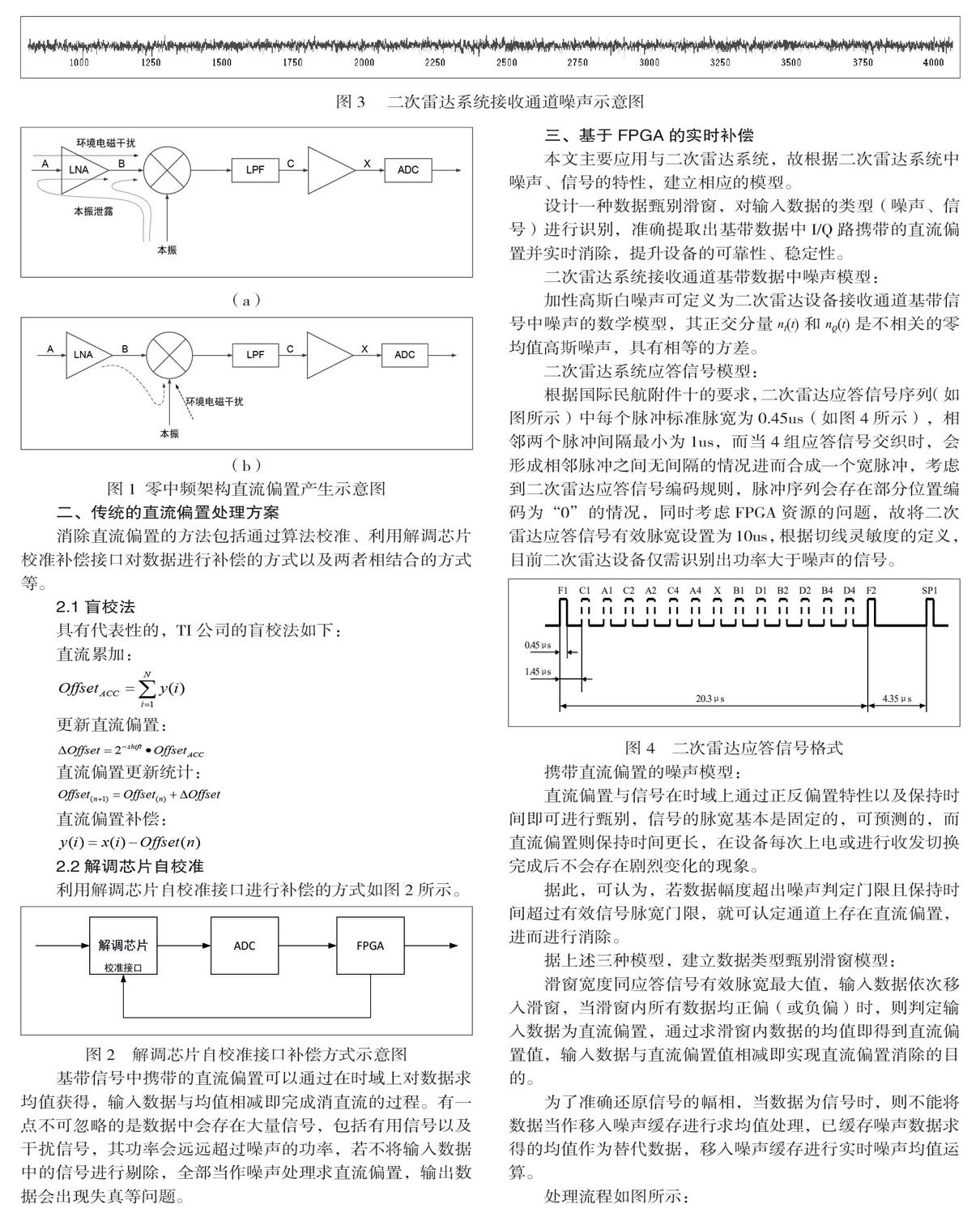
二次雷达系统应答信号模型:
根据国际民航附件十的要求,二次雷达应答信号序列(如图所示)中每个脉冲标准脉宽为0.45us(如图4所示),相邻两个脉冲间隔最小为1us,而当4组应答信号交织时,会形成相邻脉冲之间无间隔的情况进而合成一个宽脉冲,考虑到二次雷达应答信号编码规则,脉冲序列会存在部分位置编码为“0”的情况,同时考虑FPGA资源的问题,故将二次雷达应答信号有效脉宽设置为10us,根据切线灵敏度的定义,目前二次雷达设备仅需识别出功率大于噪声的信号。
携带直流偏置的噪声模型:
直流偏置与信号在时域上通过正反偏置特性以及保持時间即可进行甄别,信号的脉宽基本是固定的,可预测的,而直流偏置则保持时间更长,在设备每次上电或进行收发切换完成后不会存在剧烈变化的现象。
据此,可认为,若数据幅度超出噪声判定门限且保持时间超过有效信号脉宽门限,就可认定通道上存在直流偏置,进而进行消除。
据上述三种模型,建立数据类型甄别滑窗模型:
滑窗宽度同应答信号有效脉宽最大值,输入数据依次移入滑窗,当滑窗内所有数据均正偏(或负偏)时,则判定输入数据为直流偏置,通过求滑窗内数据的均值即得到直流偏置值,输入数据与直流偏置值相减即实现直流偏置消除的目的。
为了准确还原信号的幅相,当数据为信号时,则不能将数据当作移入噪声缓存进行求均值处理,已缓存噪声数据求得的均值作为替代数据,移入噪声缓存进行实时噪声均值运算。
处理流程如图所示:
按照上述数据模型展开算法设计:
1.通过统计特性获取噪声初始化参数,接收通道无信号输入状态采集10次上电后各4096组数据xS(t),通过运算分别获得算数平均值AVAnoise、最大值MAXnoise及最小值MINnoise,以及间接运算获得无直流偏置时的噪声最大正偏值NMPOinit,最大负偏值的初始值NMNOinit;
AVAnoise= (1)
NMPOinit=MAXnoise-AVAnoise (2)
NMNOinit=MINnoise-AVAnoise (3)
2.由于直流偏置值是根据实时的噪声数据进行提取,接下来确定噪声数据xN(t)的表达式。
首先定义输入数据为xI(t),定义噪声均值为mN(t),定义xMPO(t)为噪声(含携带直流偏置时的噪声)最大正偏值,xMNO(t)为噪声最大负偏置,定义xT(t)来标记输入数据xI(t)的正反偏置类型。
噪声最大正偏值表达式如下:
(4)
噪声最大负偏置表达式如下:
(5)
输入数据正反偏置类型表达式如下:
(6)
输入数据类型(信号或噪声)通过连续256组数据的正反偏置属性来识别:
1)xT(t)、xT(t-1)、...、xT(t-255)的值同时为1,即连续256组数据同时正偏,表示连续256组数据为携带直流偏置(相对当前偏置值存在正向偏移量)的噪声数据;
2)xT(t)、xT(t-1)、...、xT(t-255)的值同时为2,即连续256组数据同时负偏,表示连续256组数据为携带直流偏置(相对当前偏置值存在反相偏移量)的噪声数据;
3)xT(t)、xT(t-1)、...、xT(t-255)的值全为0即数据既未正偏也未负偏,表示256组数据全为未携带噪声偏置(相对当前偏置值无偏移量)的噪声数据;
4)xT(t)、xT(t-1)、...、xT(t-255)的值有部分为1或为2,其余为0,表明数据中存在部分信号(偏置类型不为0的部分,无需判定其为有效信号或干扰信号),此时噪声数据用实时的噪声均值进行替代。
在消除直流的过程中,由于噪声均值的变化,256组连续数据的正反偏置特性会逐个由1(或2)变化为0,为保证整个过程的完整,必须在识别出直流偏置后设置一个消除标志xflag(t),指示直流消除过程的状态。
据此,得到:
(7)
进一步得到噪声数据xN(t):
(8)
噪声均值mN(t) 表达式为:
(9)
对输入数据进行实时补偿后输出,得到xO(t):
xO(t)=xI(t)-mN(t) (10)
四、仿真及驗证
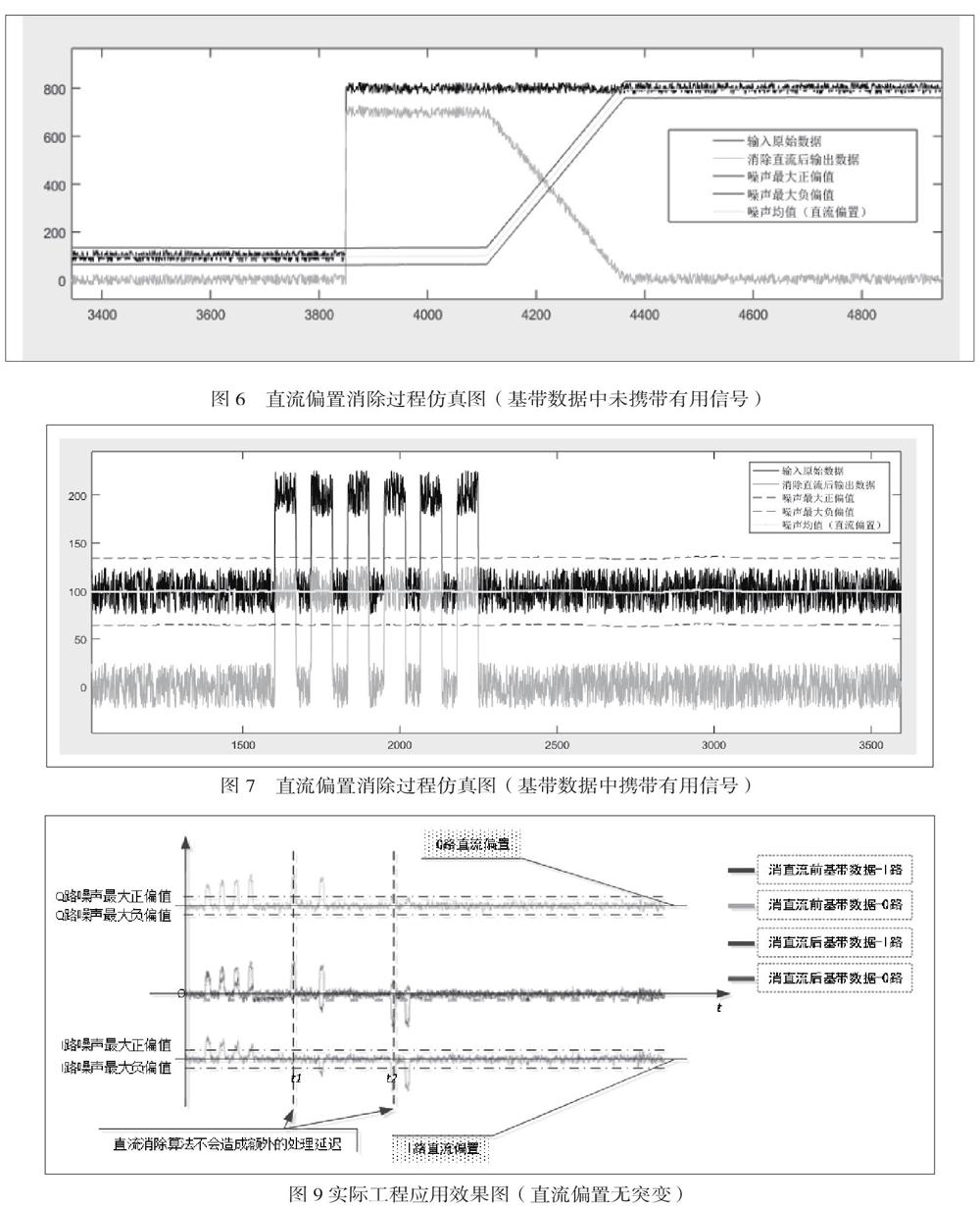
从输入的基带数据中准确提取出噪声的处理过程如图5所示。
当基带数据中存在直流偏置时,经过补偿算法处理,可以在一定时间后将直流偏置消除。
当基带数据中存在直流偏置且携带有用信号时,经过补偿算法处理,可以在一定时间后将直流偏置消除,且有用信号的特征信息能够保持。
补偿算法在实际工程中应用效果如图8所示。
作者简介
参 考 文 献
[1]国际民用航空公约 附件10 国际民用航空组织
[2]二次雷达原理 张尉 国防工业出版社
刘永刚(1980-),男,山西省平遥县人,硕士研究生,高级工程师,主要从事雷达系统及信号处理算法等方面的研究。
杨见(1984-),男,湖北利川市人,本科生,高级工程师,主要从事雷达系统及信号处理算法等方面的研究。
邹亮(1985-),男,江西省宜春市人,硕士研究生,高级工程师,主要从事雷达系统及信号处理算法等方面的研究。