
自适应Radon单像素成像
2021-10-04 11:46:40王蔚松吴洪波王灵杰刘铭鑫赵尚男
光学精密工程 2021年8期
王蔚松,吴洪波,王灵杰,刘铭鑫,赵尚男,张 新*
(1.中国科学院 长春光学精密机械与物理研究所光学系统先进制造技术重点实验室,吉林 长春 130033;2.中国科学院大学,北京 100049)
1 引 言
单像素成像(Single Pixel Imaging,SPI)作为新兴的计算成像技术,其利用结构光调制,仅使用一个不具备空间分辨能力的单像素探测器实现成像,能够感知微弱光强的变化,具有很高的探测效率[1],随着硬件性能的提升,且价格相较于面阵探测器更便宜,SPI在不可见光波段如红外、X、荧光、太赫兹波段具有优势。SPI能够在时间维度上编码空间信息[2],记 录一维的光强信号,因此具有极高的时间分辨率,可应用于时间域的成像[3]或发展超快成像领域[4-5]。
单像素成像是通过牺牲时间换取空间的成像方法,对场景需要进行大量的采样。采样的结构光基底分为非正交基底和正交基底,通过参考光(结构光)与信号光之间的关联运算进行成像[6–8]。使用随机散斑或者二进制图案作为非正交基底对光场进行编码,需要远大于重建图像分辨率的采样次数才能够恢复清晰的图像[9-10],比 如Sun使 用 了106种随机图案进行了百万次测量来重建分辨率为256×192的图像[11]。即使使用空间光调制器件加快了调制速率,采样数量和成像时间仍是限制单像素成像技术应用的重要因素。压缩感知技术指出,低于奈奎斯特采样频率的信号也能够恢复原始信号[12],基于压缩感知算法的单像素成像算法极大的降低采样次数,并且能够恢复低噪声和高质量的图像[13-16]。但随之带来较长的重建时间依然限制了成像效率。
此时一些具有正交性的感知矩阵进入研究人员的视野。根据变换基底的不同,产生了基于小波变换[17-18]、离散余弦变换[19]、傅里叶变换[20-22]、哈达玛变换[23-25]等单像素成像技术,在数学上促进了各成像领域之间的融合。单采样的次数等价于图像分辨率大小,因此仍表现为低帧速率成像。为降低采样次数,Bian提出的eSPI方法,提取并恢复频域占比最大的区域,将采样数量降低了两个数量级[26],Shi等人在稀疏傅里叶单像素成像的基础上结合了压缩感知技术,在降低采样数量的同时提高了成像的质量[27]。实际上,场景中的有效信息仅占场景的一部分,Sun等人使用小波变换提取目标中的感兴趣区域,并使用哈达玛单像素成像方法对感兴趣区域进行高分辨率重建[17],其属于多分辨率成像的范畴;Ji‐ang等人通过傅里叶切片定理定位一个目标区域,并在目标区域自适应的进行傅里叶单像素成像,降低了采样图案的数量[28],但只能够对单一目标成像;Shi给出了使用Hadamard变换实现目标边缘定位的方案,具有极高的检测速度[29],但需要背景信息作为先验,并且没有实现目标区域的成像。
Radon变换建立了物体内部元素与投影数据之间的联系,Harald最早将Radon变换用于单像素成像[30],但使用旋转的机械结构和标线圆盘提取Radon变换系数会产生较大的误差,且标线圆盘灵活性差;Shi通过空间光调制器产生的结构光对整个场景进行调制,实现了Radon单像素成像(Radon Single-Pixel Imaging,RSI)[31],需要等同于图像分辨率的采样次数才能够实现高质量成像。本文在Radon单像素成像的基础上,提出了自适应Radon单像素成像方法(Adaptive Ra‐don Single-Pixel Imaging,ARSI),使用Radon投影变换定位目标区域的基础上,匹配的基底图案大小,对目标区域进行单像素采样和重建,提高了单像素成像的成像效率。
2 基本原理
2.1 基于ARSI的目标区域定位
如图1(a)所示,场景的分辨率为256×256,场景中的有效信息仅集中在矩形框中,我们称之为目标区域。使用传统的单像素成像方法,在不结合压缩感知技术的前提下,至少需要256×256次采样,才能够清楚地重建整幅场景图片,以保证目标区域成像质量。实际上,背景中基本包含很少量的信息,在采样过程中可以被忽略,因此仅对目标区域进行采样与重建能够大量减少单像素成像的采样数量。ARSI方法的关键问题分为使用目标区域的定位与重建。
Radon变换可被描述为:给定图像Radon变换是图像沿给定角度的线积分[32],也被形容为图像在给定方向上的投影。Radon变换的数学表达式为:
L是xOy面上的直线,s是原点到L的距离,θ是L的法线与x轴正向的交角。s和θ是直线L的位置参数,给定s和θ时L被唯一确定。r(s,θ)的集合被称为f(x,y)的Radon变换,其中项δ是狄拉克分布函数。
根据Radon投影变换定理,图像在不同方向的投影积分曲线表现出不同的分布特征,这是ARSI定位目标区域的依据,因此我们分别提取图像在x方向和y方向的投影曲线,此时θ=0和
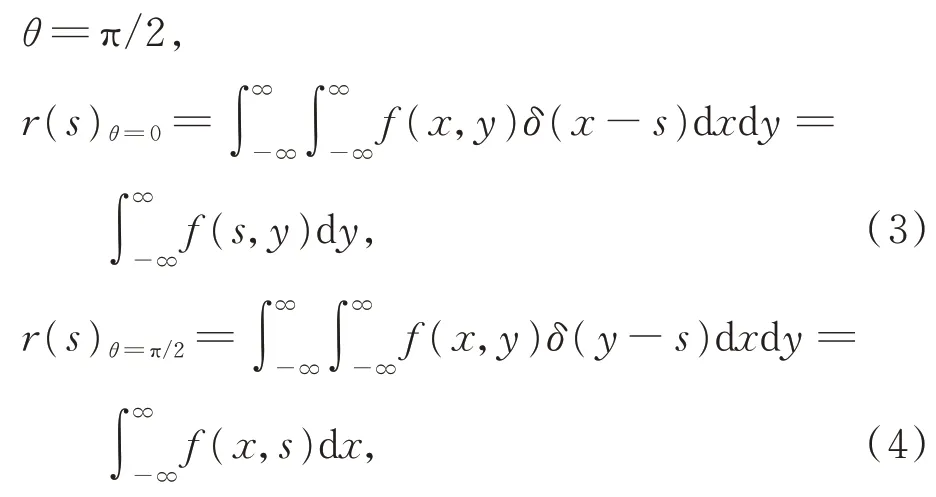
图1(b)为图像在x方向的投影分布r(s)θ=0,图1(c)为图像在y方向的投影分布r(s)θ=π/2。目标区域的能量分布与背景具有显著的差别,通过边缘检测[33]能够得到目标区域的边界点(x1,y1)(x2,y1)(x1,y2)(x2,y2),目标区域的中心坐标为,记为M(xr,yr)。图1(d)为场景的Radon投影变换,红色曲线为四个边缘点的Radon投影结果,每一个点的投影轨迹都表现为正弦分布,并且目标区域Radon投影变换后,其能量分布集中在四条正弦曲线限制的范围内。
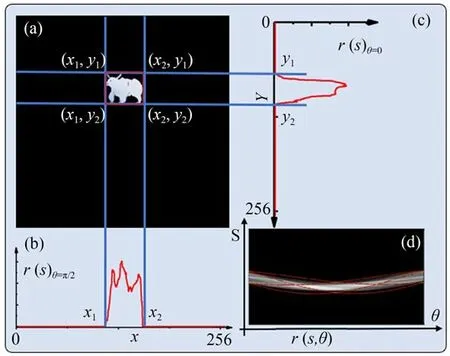
图1 目标区域定位方法Fig.1 Target region positioning method
场景图像f(x,y)的大小为N×N,实现单像素成像的Radon投影变换基底模式为:

其作用为提取图像在给定直线L(s,θ)上的所有像素点,遍历所有的s和θ即可获得图像Ra‐don投影变换。而P(s,θ)在空间光调制器上表现为“亮”直线,编码方式虽然简单,但是每次仅获取一条直线上的像素点,SLM的运用效率极低,且获取的光强值极小。本文结合Hadamard变换,使用统计学原理获取图像在不同方向上的投影能量[31,29]。Radon-Hadamard(R-H)基底为:
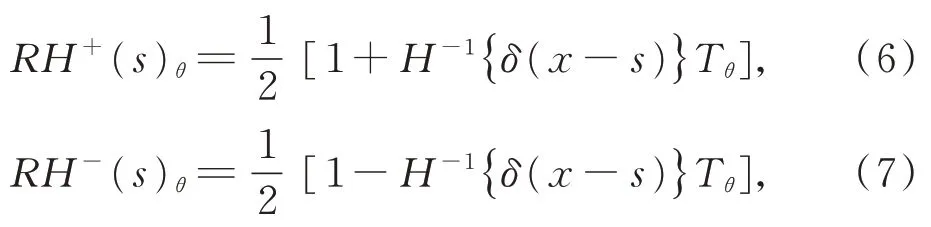
其中,H-1{}表示哈达玛变换,Tθ表示旋转因子。Radon-Hadamard模式基底图案如图2所示,图2(a)(b)分别为获得图像在x和y方向的投影模式图案,选取i=3阶Radon-Hadamard示例以简要显示。
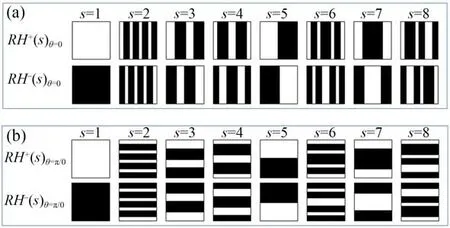
图2 三阶Radon-Hadamard基底图案Fig.2 Third-order Radon-Hadamard basis pattern
使用Radon-Hadamard基底对场景图片的采样获得的测量值为:
D+和D-分别为单像素探测器获得的测量值,差分的测量方式能够有效的抑制噪声[24],通过R-H模式获取的Radon投影变换域的系数为:

当θ=0和θ=π/2则能够获得图1(b)和图1(c)对应的投影曲线。考虑到Radon变换的周期特性,全采样需要的角度范围是[0,π),因此对整个场景进行全采样所需的模式图案数量为Np=2×m×N,m为投影方向的数量(m=π/Δθ,Δθ为角度的采样间隔)。
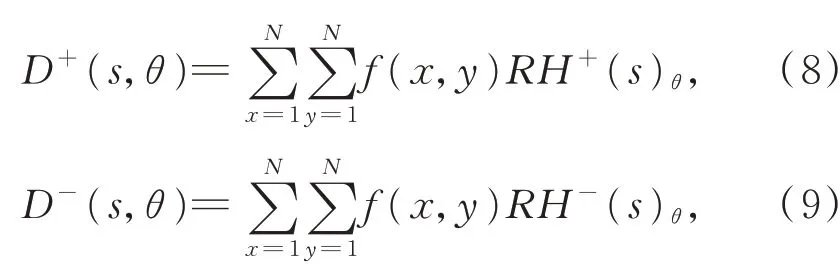
如图3(a)所示,ARSI通过投影定位出目标区域,仅对目标区域进行单像素采样和成像,能够很大程度降低测量次数。如图3(b)所示,我们计算目标区域的中心坐标为M(xr,yr),选取与目标区域大小接近的Radon-Hadamard模式作为采样图案,新的R-H模式大小为n×n(n=2i,n≤N),小于场景分辨率N×N。更新后的目标区域大于原始目标区域,降低了对初始目标区域定位的精度要求。此时所单像素成像需要的采样数量为Np=2×m×n。R-H模式变为:
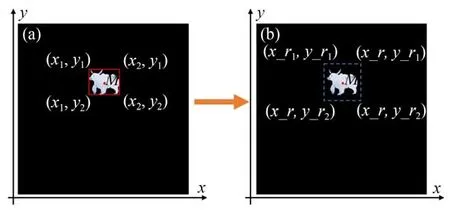
图3 匹配目标区域Fig.3 Matched target region

目标区域的Radon变换域为:

其中s_r为目标区域的投影坐标,更新后的目标区域大小为n×n,中心坐标不变,此时目标区域的范围变为:

图4为ARSI对目标区域Ω(x,y)的采样过程,通过单像素成像方法,使用图4(c)中不同的R-H模式图案调制目标区域,能够获取如图4(d)所示的Radon变换域。
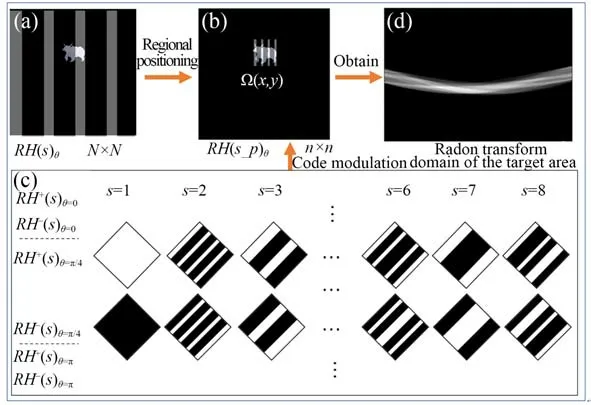
图4 场景全采样和目标区域采样:(a)目标区域定位;(b)目标区域采样;(c)不同的R-H模式图案;(d)目标区域的Radon变换Fig.4 Full sampling of the scene and sampling of the tar‐get region:(a)Target region positioning;(b)Tar‐get region sampling;(c)Different R-H pattern pat‐terns;(d)Radon transform of the target region
我们定义目标区域和场景区域的采样压缩比为:

其中,t为目标个数。
2.2 图像重建
滤波反投影算法用于重建图像,其多用于计算机断层成像领域,能够将图像信息从Radon变换域转为空间域,其表达式为:
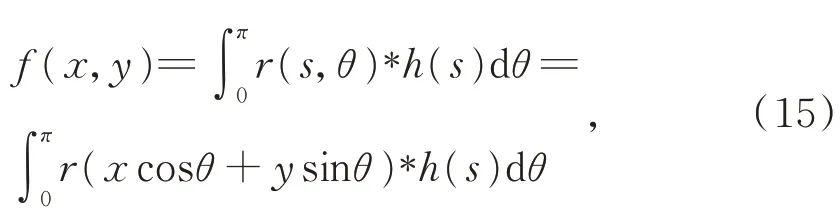
r(s,θ)为单像素方法获取的Radon变换域,h(s)为滤波器函数,当不存在h(s)时,公式(15)为直接反投影的过程,f(x,y)中会存在星状伪影,造成图像质量的下降。本文采用Hamming滤波函数,避免了大量的正弦、余弦计算,所重建图像轮廓清楚。目标区域的单像素成像结果为fr(x,y):

为获得还原目标在场景中的位置,将目标区域与背景融合,使最终的重建场景与原场景具有相同的分辨率(N×N),坐标转换公式为:
3 成像分析
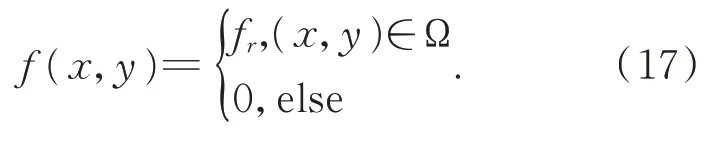
图5为ARSI方法,图5(a)为ARSI方法的组成结构,主要包括单像素成像硬件和ARSI算法;图5(b)为实现ARSI的光路结构,光路类型为前调制型单像素成像光路[20],选用数字投影仪器(Digital Projector,DLP)作为SLM用于产生编码图案,DLP生成时间变化的编码R-H模式序列用于照明场景,生成速率5 000 Hz,反射光经过焦距为125 mm的聚光透镜,光电二极管作为单像素探测器,数据采集设备(DAQ)用于数据采集和信号转换,计算机用于控制和处理数据,物体距离透镜0.5 m。
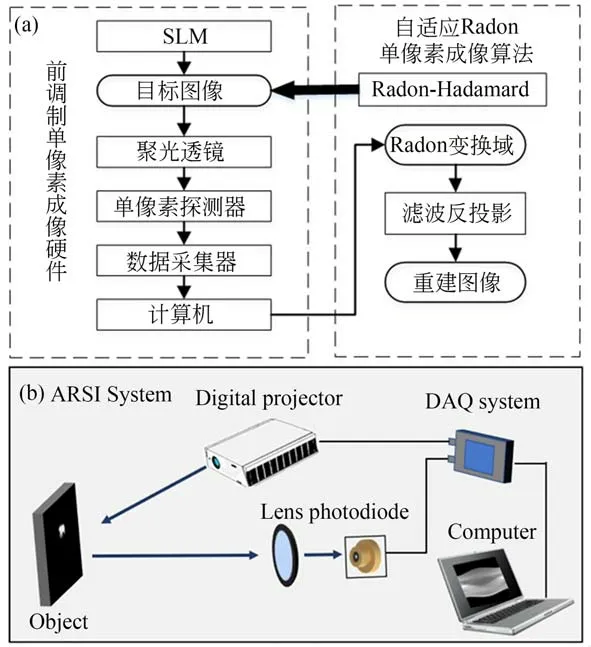
图5 ARSI方法Fig.5 ARSI method
3.1 单目标ARSI
我们继续使用“小牛”图验证ARSI算法,重建场景分辨率为256×256,如图6所示,根据投影定位算法,图6(a)为计算出目标区域的边界,其中心坐标为M(129,168),选取64×64的R-H模式图案,因此更新后的目标区域如图6(b)所示,采样压缩比为25%。
图6 目标区域定位与R-H模式匹配Fig.6 Target region positioning and R-H pattern match‐ing
R-H模式基底采样时,设置角度间隔为1°,因此m=180。通过一系列不同的R-H模式图案对目标区域进行采样,以获取Radon变换域系数,再通过滤波反投影方法重建目标区域图像,通过图像融合最终获得重建后的场景,如图7所示,添加结构相似性系数以客观评价图像重建结果[35],以研究重建目标区域与原始目标区域之间的差别。
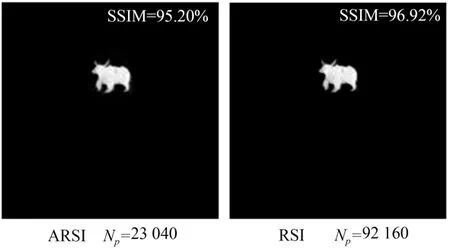
图7 ARSI成像结果Fig.7 ARSI imaging results
ARSI的采样次数为23 040,RSI的采样次数为92 160,ARSI的采样次数为RSI的1/4,成像效率提升4倍,但最终的成像质量相同,证明了ARSI在降低采样数量的同时,还能够保证成像的质量。实验对真实“小鸭子”场景进行ARSI,重建场景分辨率为256×256。根据ARSI定位,128×128的Radon-Hadamard的模板对目标区域进行采样,采样压缩比为C=50%,角度间隔为1°,实验结果如图8所示,对于大目标区域的重建依旧表现出较高的成像质量,成像效率是全采样条件下2倍。
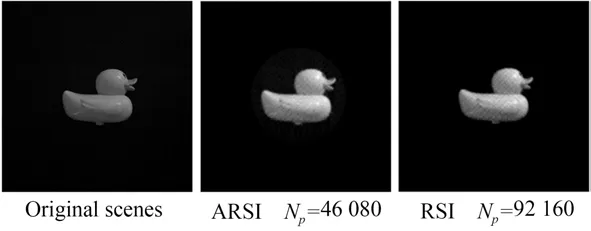
图8 大目标区域ARSI成像结果Fig.8 ARSI imaging results of a large target region
实验还设置了相同采样次数的条件下,RSI和ARSI成像质量的对比,分别设置n=32,64,128,256大小的R-H模式图案执行RSI和ARSI,实验结果如图8所示。当R-H模板仅为32×32时,其小于目标区域的大小,矩形区域放大后显示,目标区域大部分特征得以恢复但边缘信息丢失,ARSI重建的目标区域不完整,此为R-H模式大小不匹配的重建结果。此时RSI重建质量非常差,无法识别目标区域特征信息。随着R-H模式大小匹配目标区域,R-H模式分辨率小于图像分辨率时,RSI无法实现全采样,重建图像的质量明显低于ARSI,实验证明了当压缩率小于100%时,ARSI有效提高了单像素成像的成像效率。
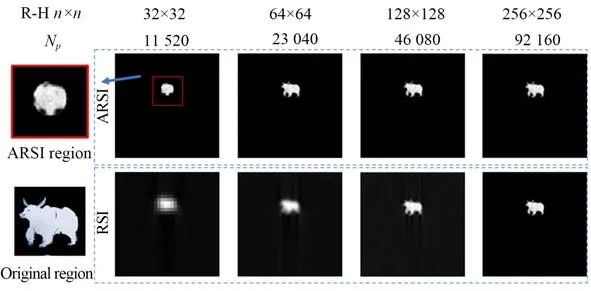
图9 RSI和ARSI成像 对比Fig.9 RSI and PRSI imaging comparison
3.2 多目标ARSI
在已知具有三个目标区域的情况下,使用ARSI寻找目标区域的位置坐标。如图10所示,设置了三种不同位置分布的场景,重建场景分辨率为256×256,分别为:(a)三个“小牛”的横纵坐标互不混叠,在x方向和y方向上的投影具有三个明显的特征峰分布,因此能够准确定位出三个目标区域的位置;在图10(b)中,“小牛2”和“小牛3”横坐标重叠,其投影的特征峰发生混叠,三个“小牛”在x方向上仅表现出两个特征峰,但在y方向上的投影互不影响,明显区分其坐标位置,因此依然能够定位三个目标位置;图10(c)中,“小牛1”和“小牛2”纵坐标重叠,“小牛2”和“小牛3”横坐标重叠,在x和y方向上都表现出两个特征峰,尤其是peak-2其投影的能量值大于peak-1,且peak-2的 宽 度 大 于peak-1,这表示peak-2为两个目标合成的特征峰,但无法区分二者的位置,我们添加了y=x方向的投影分布,在该方向上能够准确区分三个特征峰,借助三个方向的投影曲线,能够精准定位三个目标区域的中心坐标。图10(c)定位所需的R-H基底的采样次数为1 536次,使用SLM调制花费极少的时间。
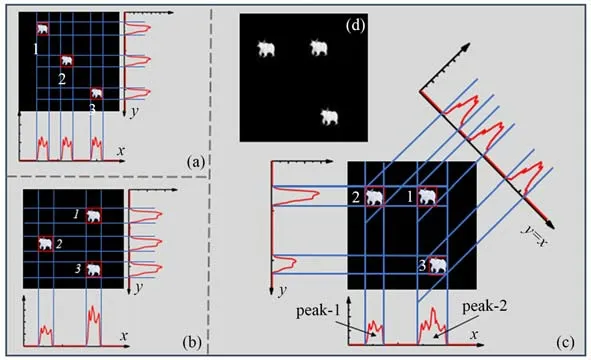
图10 多目标定位和成像Fig.10 Multi-target positioning and imaging
图10(c)为多目标区域的重建结果,R-H模板大小为64×64,分别对三个区域进行成像,然后融合背景信息还原场景,全采样所需的采样数量 为92 160,ARSI采样次数为3×2×64×180=69 120,采样压缩比C=75%。该实验验证了ARSI具有对场景内多目标图像定位和重建的能力,其所需的采样数量少于全采样条件下的采样数量。
3.3 局限性
本文所提出的方法也具有局限性,实验场景的背景信息过于简单,当目标区域位于复杂的场景中时,其定位难度将增加;Hadamard变换的对象只能为2i大小,限制了目标区域范围,但如果不考虑探测效率,使用高灵敏度的单像素探测器,可以仅通过线编码获取Radon变换域;对于多个目标区域的定位,目标区域之间距离不能过小,否则会造成解纠缠困难,产生定位误差。ARSI在多目标区域定位中具有潜在能力,通过更改Radon-Hadamard模式尺寸使其应用于场景的多分辨率成像,未来结合深度学习提升其在复杂目标和场景下的应用能力。
4 结 论
本文提出使用Radon投影变换实现目标区域定位和成像的技术。在有效信息仅占场景一部分的情况下,使用水平和垂直的Radon-Had‐amard模式作为采样的基底图案,定位目标区域的中心位置和计算其大小范围。选用匹配分辨率的基底图案对目标区域进行重建,ARSI所需的采样数量远小于全采样的采样数量,且能够保证重建图像质量,提高了单像素成像的成像效率。另外尝试了多目标实验,通过增加投影方向,ARSI能够定位并成像多个目标区域,可应用于多目标探测领域。
猜你喜欢
中国银幕(2022年4期)2022-04-07 21:28:24
数学物理学报(2021年1期)2021-03-29 03:14:42
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25 01:40:34
数学物理学报(2019年3期)2019-07-23 01:15:40
学生天地·小学低年级版(2019年5期)2019-06-05 01:15:11
学生天地(2019年15期)2019-05-05 06:28:28
家庭影院技术(2018年9期)2018-11-02 05:31:32
自动化学报(2017年5期)2017-05-14 06:20:52
成都信息工程大学学报(2017年6期)2017-03-16 03:04:32
山东工业技术(2016年15期)2016-12-01 05:32:02
