基于激光雷达与BIM技术的变电站施工三维仿真模拟*
2021-09-30 01:57:54张成炜李扬森
湘潭大学自然科学学报 2021年3期
郭 威, 张成炜, 尹 元, 李扬森
(1.国网福建省电力有限公司经济技术研究院,福建 福州 350012;2.国网福建省电力有限公司,福建 福州 350012)
0 前言
电网中的变电站一般采用分期建设方式,前期按远景规模预留场地,后续随着负荷的增长陆续扩建.目前,服役近二三十年的老旧变电站原地改建的工程案例也逐渐增多.在改扩建施工过程中,土建基础与上部结构施工、变压器和GIS等大型设备站内运输、设备安装都需要采用大型吊车、平板车等机械设备.为保证电网供电,在满足施工作业面的前提下,变电站内已运行设备需要尽可能少占用空间、避免短时间停电,施工前需要提前编制施工组织设计方案,经电网管理部门审批后实施[1].因此,变电站施工前如能采用有效方法对其施工过程进行仿真模拟,实现变电站施工过程预演,可提高变电站施工安全性和效益.
近年来,建筑信息模型(Building Information Modeling,BIM)技术在变电站建设中的应用得到了长足的进步.基于BIM软件建立变电站三维设计模型,实现施工进度模拟、成本管理、质量管理、安全管理等应用功能,多应用于新建变电站虚拟建造的过程[2].改扩建变电站需要对变电站已建部分进行精确建模,激光雷达技术的出现为此提供了解决方案.激光雷达是一种主动式对地进行三维直接测量的技术,具有高精度的优点,激光雷达技术已在变电工程三维实景重构、带电距离检测、硬管母参数测量中得到应用.国内外相关学者也对此展开了研究,如张群[3]等人根据变电站建设工程的实际应用需求,对比分析了传统CAD技术和BIM技术的特点,构建了一种基于BIM技术的三维模拟仿真系统,将BIM技术应用于实际变电站设计、运行和维护中,采用Bentley Substation软件建立了变电站整体BIM模型.通过BIM建模可以实现变电站建设的全生命周期覆盖,且可以同步实现二维和三维模型展示.该系统可以随时进行二维图纸和数据移交,以及根据施工进度等,完成施工模拟、模型改进和优化.曹满鑫等[4]提出了一种基于激光雷达的三维室内环境信息采集与显示系统,开发了室内三维环境信息采集与显示系统,实现了采集室内环境信息、数据转化为图形等功能.并且通过实验验证,该系统可使用传感器对室内环境信息进行采集,并将采集到的数据转化为图形、图像,使显示环境再现.虽以上方法都取得了一定的成果,但构建的变电站施工三维仿真模型执行效率不高,质量、安全、进度管理还有待提高.
为解决以上方法存在的问题,现提出一种基于激光雷达与BIM技术的变电站施工三维仿真模型.针对变电站变压器、GIS等大型设备施工前、施工中不同施工阶段存在的机械设备操作不符合规范、安全距离预测不准确等问题,采用激光雷达技术对已建变电站进行三维实景建模,研究变电站设备施工工艺流程,集合以往变电站施工过程中的经验,采用BIM技术对变电站施工工程实施3D可视化建模,对工法实施施工虚拟方案设计,得到变电站施工仿真模拟的应用方案,可模拟变电站施工前、施工中不同施工节点下进场轨迹,并校验变电站施工作业以及与周围设备的安全距离,警示机械操作不标准以及机械同周围产生碰撞问题[5-6].对变电站施工材料、机具进行摆放模拟,对人员运行过程进行模拟,进而对变电站施工流程以及场地部署过程进行模拟,从而提高变电站改扩建施工的安全性、进度及质量.
1 基于激光雷达和BIM技术的变电站施工三维仿真模型构建
1.1 激光雷达扫描变电站点云模型
变电站三维仿真模型主要包括改扩建的设备与构件模型、已建的变电站环境模型.本文采用BIM建模工具构建变电站的设备与构件模型,利用激光雷达扫描变电站,所采集到的点云数据包括目标场景中物体的三维坐标、倾斜角度、反射角度和颜色等.在三维坐标系中,变电站点云模型的坐标可以表示为:
{Pi=f(Xi,Yi,Zi)|Xi,Yi,Zi∈R3}.
(1)
式(1)中,变电站测量值可以用f(Xi,Yi,Zi)进行表示,则该值可以用以下公式计算得出:
f(Xi,Yi,Zi)=h(Xi,Yi,Zi)+e(Xi,Yi,Zi).
(2)
式(2)中,h(Xi,Yi,Zi)与e(Xi,Yi,Zi)分别表示变电站真实值以及测量误差.
在实际中,h(Xi,Yi,Zi)主要由随机分量hδ(Xi,Yi,Zi)以及确定分量ho(Xi,Yi,Zi)组成;而e(Xi,Yi,Zi)主要由随机误差α(Xi,Yi,Zi)以及系统误差β(Xi,Yi,Zi)组成.
结合以上分析,则变电站点云模型可以用以下公式表示:
f(Xi,Yi,Zi)=hδ(Xi,Yi,Zi)+ho(Xi,Yi,Zi)+
α(Xi,Yi,Zi)+β(Xi,Yi,Zi)
(3)
将变电站点云模型应用至变电站三维仿真模拟中,可以精确构建变电站已建部分的模型.
1.2 基于BIM技术的施工模拟
通过激光雷达技术对已建变电站进行三维精确建模,同时采用BIM技术对改扩建部分进行建模,两者结合开展施工仿真分析.采用BIM技术对改扩建部分进行建模所展现的是实际的施工场景,而非原来以动画的方式展现出的效果.
为确保变电站施工预备建设计划的顺利进行,从动态可视化角度出发,在施工时通过模拟真实施工情景,对变电站施工前、施工中不同施工节点下进场轨迹模拟进行可视化展现[7].通过BIM的Revit程序建立一个可以主动产生二维图形信息和其他关联非图形化施工方案信息的三维数字化建筑模型.为了获取变电站施工工程的分部以及分项,应对工程量的汇总信息进行分析.Microsoft office project文档主要记录PBA方法中进程计划和工作顺序等信息[8].采用Navisworks中的TimeLiner完成变电站机械化模拟施工流程.图1为变电站施工模拟应用方案,通过结构模型和管线与图层模型的建立,构建3D可视化建筑信息模型,结合施工组织设计文件,通过施工虚拟协调平台构建虚拟仿真,不断调整施工方案,得出最优施工方案.

图1 变电站施工模拟应用方案Fig.1 Application scheme of mechanized construction simulation in substation
BIM可以提前演示可视化施工过程.施工实时过程的演变是从一个施工情景到下一个施工情景的阐述以及解析.为了更加直观地体现施工进程、工作计划、工艺顺序,以及提前呈现计划中隐藏的问题,在施工中进行了精准化、动态化和智能化的管理[9].为防止因图纸改变、各专业协作难度大而产生多余支出,采用BIM技术对变电站改扩建部分进行建模,同时也确保了施工计划的正确性和通畅性,节省了工作时间.
1.3 同图形的交互
为了将基于激光雷达技术的已建变电站三维建模和基于BIM技术的改扩建部分建模进行结合,需要做好同图形的交互.
用户通过图形交互能够实现虚拟场景的平移、旋转以及缩放等,从不同的角度对虚拟变电站施工环境中的局部进行观测[10].用户采用动态演示模块完成变电站施工过程的动态仿真分析,要想获取施工信息,应通过模拟运算程序进行相关的运算,得到不同施工单元的开始时间以及持续时间等参数,进而得到工程某施工单元在t时刻的画面.通过演示属性库为施工动画提供基础,通过动态演示模型实现施工过程的动态演示,对施工过程的场景进行动态呈现,同时呈现出即刻施工过程中的有关信息,再结合地理信息系统确保用户对整体施工过程进行直观分析.
2 变电站施工仿真模拟
2.1 变电站施工动态模拟演示
针对激光雷达技术对已建变电站进行三维建模并采用BIM技术对改扩建部分进行建模后,对变电站施工进行仿真模拟.由于变电站施工工期长,施工领域广,在涵盖总体变电站施工场景的三维图中不同细节间的差异性不够显著,导致用户对工程的了解度降低.因此,本文方法采用巡航检测性能,对采用成像频率、成像风格以及视点位置的方式进行调控,对虚拟的施工材料、机具和人员进行摆放模拟以及运行模拟,进而向用户成像,确保用户可基于变电站局部对施工工程进行观测.
为了获取施工过程的三维仿真场景,实现变电站施工流程及场地布置过程预演.变电站施工场景漫游模型应采用平面规划策略进行分析,模型利用三维真实场景实时漫游方案,确保用户能够在场景中基于不同的位置以及角度对总体变电站施工过程进行检测,获取变电站施工流程以及场地布置过程在仿真虚拟方案中存在的缺陷,实时完成合理的修正[11-12].用户通过漫游模型,能够从空间实时漫游的角度,对变电站施工流程以及场地布置过程仿真模拟效果进行动态分析.虚拟施工能够将变电站施工过程中相关工程质量控制点和安全隐患提前检测处理,并通过针对性的预处理方案,进行预警标识、完善施工策略,完成变电站施工的主动管控.变电站施工过程动态模拟演示流程如图2所示.
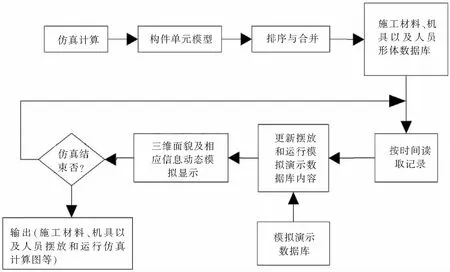
图2 变电站施工过程动态模拟演示流程图Fig.2 Flow chart of dynamic simulation for substation mechanization construction process
本文方法采用基于图像实现虚拟景观漫游的方法,通过实时图像操作过程形成三维透视检测效果,通过实时图像操作实现动画播放,实现变电站施工流程及场地布置过程预演,本文方法的漫游模型结构描述如图3所示.
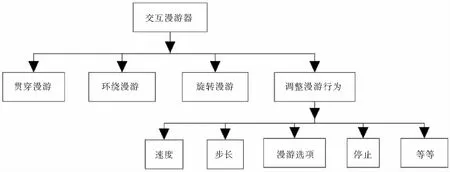
图3 漫游模型结构示意图Fig.3 Schematic diagram of roaming model structure
2.2 碰撞检测算法
通过碰撞检测方法警示机械操作不满足要求以及周围环境存在碰撞的问题.碰撞检测是在实景模拟环境内,对物体同场景以及不同物体间是否存在碰撞的检测方法,当前的碰撞检测算法分别是基于视点以及包围盒进行检测,前者将视点当成起点,起点运行的步长当成长度,最终构成线段,对该线段同场景内全部可见面的相交状态实施检测;后者对三维实体间的碰撞实施检测,针对待检测对象塑造包围盒,检测对象间的碰撞问题也就是对包围盒的碰撞实施检测.若变电站施工场景中存在大量的三维实体,基于包围盒的碰撞检测方法的检测效率较低,该方法塑造的包围盒导致检测范围大大提高[13-14].
本文方法主要是对机械操作不符合规范以及机械与周围发生碰撞进行检测,并且给出碰撞进行警示,基于待检测对象的碰撞检测点坐标,对变电站施工场景模型塑造不规则多面包围体并实施几何运算,完成碰撞检测.待检测对象与变电站施工场景存在碰撞的检测过程如下.
(1)从待检测对象中采集碰撞检测点
变电站施工过程中的三维实景模型内用点描述待检测对象,基于待检测对象运行方向,将其运动方向中最前端点当成碰撞检测点,在其运行方向设置一条射线,随机采集某个平面α,该平面与选择的射线具有垂直关系,对平面α在射线方向中的位置实施调控,确保其顺着待检测对象运行的方向不断向初次相交的位置趋近,同时将最终的交点T(x,y,z)记录下来,该点则是碰撞检测点.
对变电站施工三维场景模型塑造包围盒,中心是场景模型的质心,将模型中与质心距离值最大的三个点塑造三角形,对距离质心第四远的点以及第二、三远的点塑造三角形,进而为变电站施工三维场景塑造不规则包围体.
(2)通过几何运算分析是否存在碰撞现象
假话场景模型的包围体面数量为n,则第i个面的运算方程为:
AiX+BiY+CiZ+D=0.
(4)
则有:
NiP+D=0.
(5)
式中:βi平面内的法向量用Ni(Ai,Bi,Ci)描述;βi内的点是P(x,y,z),0≤i≤n.若该平面的法向量指向前,NiP+D>0,说明P点处于平面的前端,否则NiP+D<0,P点处于平面的后端[10,15].
向公式(4)中融入碰撞检测点坐标,如果获取的值比零高,说明该点处于场景模型包围体外端,待检测对象同变电站施工三维场景模型不存在碰撞问题,否则获取的值比零低,说明该点处于场景模型包围体内部,待检测对象同场景存在碰撞问题,如果获取的值为零,说明待检测对象恰好同场景存在碰撞问题.
3 实验分析
为了验证所设计的基于激光雷达和BIM技术的变电站改扩建三维仿真模拟系统的综合有效性,在CPU处理器Intel Core i7-8750H,内存16 GB,开发环境为Spyder,Python 3的环境下进行仿真实验测试.
3.1 执行效率
各个系统的执行效率直接影响到系统的运行速度,以下实验测试将执行效率设定为评价指标,分别与文献[3]系统、文献[4]系统和本文所设计系统的执行效率进行对比测试,实验结果如表1所示.
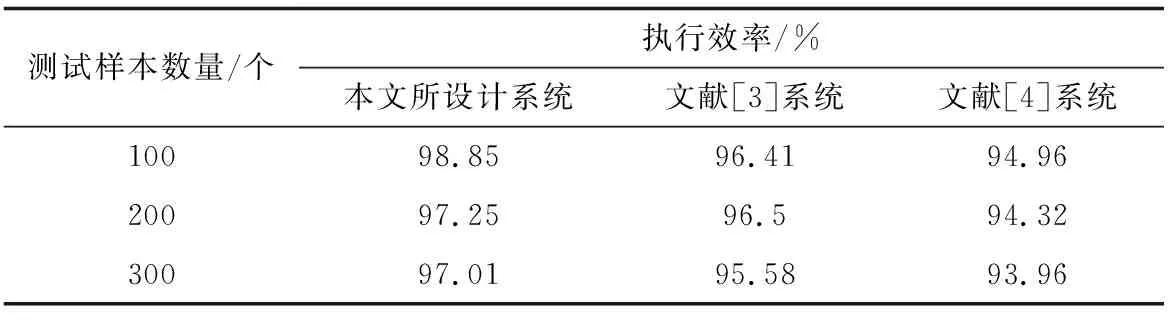
表1 不同系统的执行效率对比结果
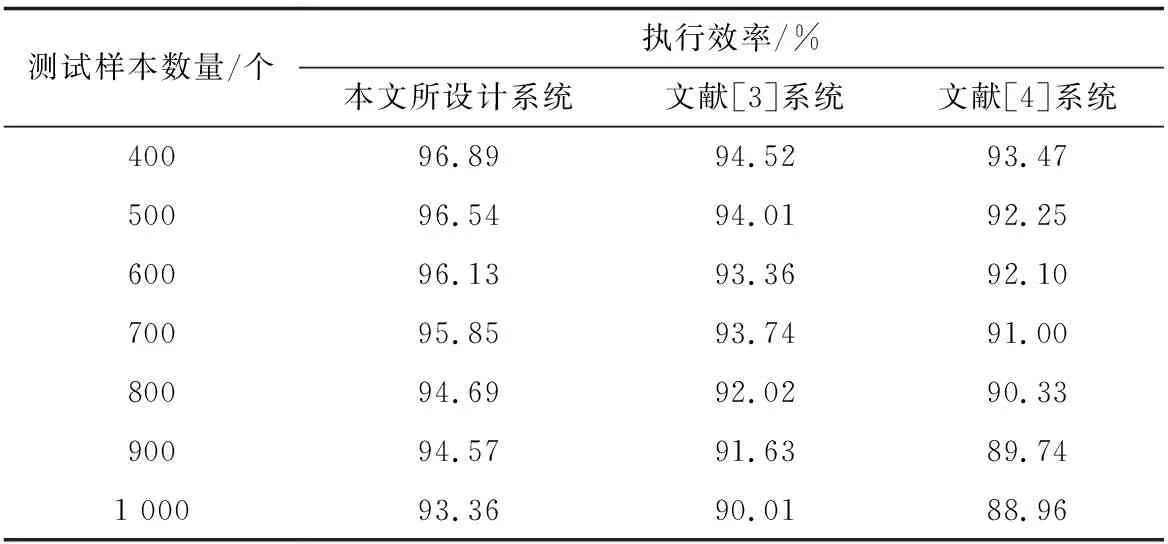
表1(续)
分析表1中的实验数据可知,由于测试样本的数量不同,导致系统整体的执行效率也在不断发生变化,相比文献[3]和文献[4]系统,本文所设计系统的执行效率明显更高一些,主要是由于本文所设计系统采用激光雷达技术进行变电站风险检测,有效剔除虚假目标,以此增强系统的执行效率.
3.2 变电站施工进度管理质量
在上述实验的基础上,进行变电站施工进度管理质量比较,管理质量评价因子在[0,10]之间,结果如图4所示.
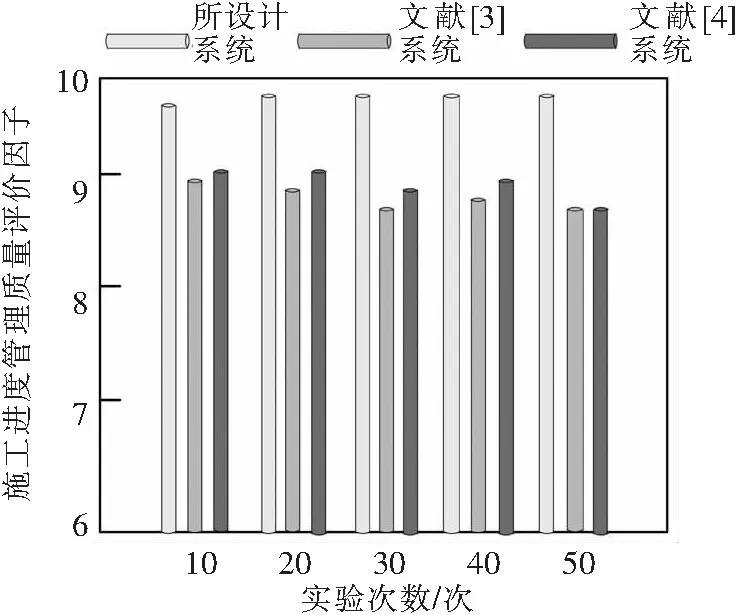
图4 施工进度管理质量对比Fig.4 Comparison of construction schedule management quality
分析图4可知,与文献[3]系统和文献[4]系统相比,本文方法所设计系统的变电站施工进度管理质量评价因子始终在9.7以上,远高于文献[3]和文献[4]系统,表明本文所设计系统的变电站施工进度管理质量更高.
3.3 变电站安全管理质量
为了进一步比较不同系统的应用性能,进行变电站安全管理质量比较,管理质量评价因子在[0,10]之间,结果如图5所示.
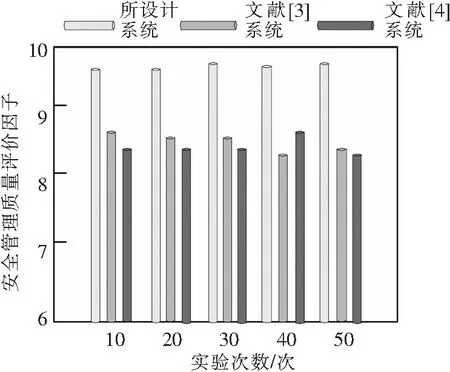
图5 安全管理质量对比Fig.5 Comparison of safety management quality
分析图5可知,与文献[3]系统和文献[4]系统相比,本文方法所设计系统的变电站安全管理质量评价因子始终在9.6以上,本文所设计系统的变电站安全管理质量更高,实际应用效果更好.主要是由于本文所设计系统采用BIM技术对变电站扩建部分的施工过程实施3D可视化建模,对施工过程中的电场空间排列情况实施自主运算,对施工人员的安全工作范围以及危险工作范围实施分割,同时通过可视化结果呈现出来,对工作人员趋近危险范围或者超过当前工作范围进行警示.可见该系统对于预防风险、进行辅助决策、减少施工中安全事故效果显著.
4 结论
基于激光雷达与BIM技术的变电站施工过程仿真模拟,主要是通过激光雷达技术对已建变电站进行三维精确建模,同时采用BIM技术对改扩建部分进行建模,两者结合开展施工仿真分析,通过碰撞检测方法警示机械操作不满足要求,以及机械周围环境存在碰撞的问题,对变电站施工进行动态演示.实验结果表明,该基于激光雷达与BIM技术的变电站施工过程三维仿真模拟系统对变电站施工场所的三维展示效果逼真,模拟效果好、执行效率高、施工进度管理质量高、安全管理效果好,可有效减少施工中安全事故,提高变电站改扩建施工效率.
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
汽车工程师(2021年12期)2022-01-17 02:29:44
汽车观察(2021年8期)2021-09-01 10:12:41
铁道通信信号(2020年10期)2020-02-07 01:01:12
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
电子制作(2018年8期)2018-06-26 06:43:34
电子测试(2018年1期)2018-04-18 11:53:00
电子制作(2017年8期)2017-06-05 09:36:15
现代工业经济和信息化(2016年5期)2016-05-17 05:35:57