
红外双幅度脉冲间隔调制通信系统传感器稳定性控制模型*
2021-09-29 10:11:26贺瑜飞乔宝明
传感技术学报 2021年7期
贺瑜飞,乔宝明
(1.榆林学院数学与统计学院,陕西 榆林 719000;2.西安科技大学理学院,陕西 西安 710054)
红外双幅度脉冲间隔调制通信系统传感器稳定性控制是当前脉冲间隔调制通信系统应用的核心控制技术。在现代科技生产领域,红外双幅度脉冲间隔调制通信系统具有广泛的应用前景和应用意义[1]。红外双幅度脉冲间隔调制通信系统传感器稳定性是其最基本的结构特性。传感器稳定性问题也是当前红外双幅度脉冲间隔调制通信系统控制课题中最重要的问题之一。无论是红外双幅度脉冲间隔调制通信系统有效控制调节器理论还是脉冲观测器理论,均需要有红外双幅度脉冲间隔调制通信系统稳定控制相关问题,这就导致当前红外双幅度脉冲间隔调制通信系统开发研究所有控制领域内大多数应用技术,均与传感器稳定性控制有关。在大多数情况下,稳定控制使红外双幅度脉冲间隔调制通信系统可以在规定时间内正常运行的前提,一般情况下系统可以划分为输出状态下外部稳定介质以及基带空间状态下的内部输出传感器稳定性控制。在一般条件下,内外部传感器稳定性需要处在等价关系下才能保证系统整体的稳定。随着现代脉冲控制理论和同类型工程所涉及的领域逐渐变更,转变为时变系统、奇异系统、核心重力系统以及线性外部扩展系统等[2]。红外双幅度脉冲间隔调制通信系统在有限时间内的传感器稳定性控制复杂程度也在不断地延伸扩散。
当前,针对红外双幅度脉冲间隔调制通信系统有限时间传感器的稳定性控制也出现了一些较好的研究成果。
文献[3]研究了离散时间不确定脉冲系统的有限时间稳定性和滤波问题。利用线性矩阵不等式和松弛变量方法,获取脉冲信号的滤波精度和有限时间稳定充分条件,利用得到的条件对脉冲系统的稳定性进行控制。文献[4]提出一种基于三矢量的三相PWM整流器脉冲系统稳定性控制方法。该方法以脉冲系统的负共轭复功率作为控制变量,采用有功、无功功率误差最小的原则计算各离散电压矢量作用时间,以达到稳定性控制的目的。以上传统模型在相关领域得到了一些应用,但均属于小范围控制,难以实现红外双幅度脉冲间隔调制通信系统有限时间下的稳定控制。
为实现红外双幅度脉冲间隔调制通信系统有限时间传感器稳定性的全局控制,设计以领域驱动为核心,重新规划控制角色,依靠数据采集、全域总线结构划分和搭建智能调理器,实现红外双幅度脉冲间隔调制通信系统在有限时间内的传感器稳定性控制。
1 控制模型构建
1.1 红外双幅度脉冲间隔调制通信系统领域驱动框架
领域驱动(DDD,Domain-Driven)是传统全局化驱动的拓展和延伸,它可以将红外双幅度脉冲间隔调制通信系统传统驱动控制模型进行更细致的驱动角色划分。其具体表现形式为重新规划了驱动框架的逻辑分层,以及对应分层决策,以此细致划分红外双幅度脉冲间隔调制通信系统控制操作流程,确保红外双幅度脉冲间隔调制通信系统在有限时间内的应用协作性和设计科学性。设计的领域驱动框架共分为四层基础架构分别为:用户界面展示、用户界面应用、用户领域以及基础建设层。对应的各层功能如图表1所示。
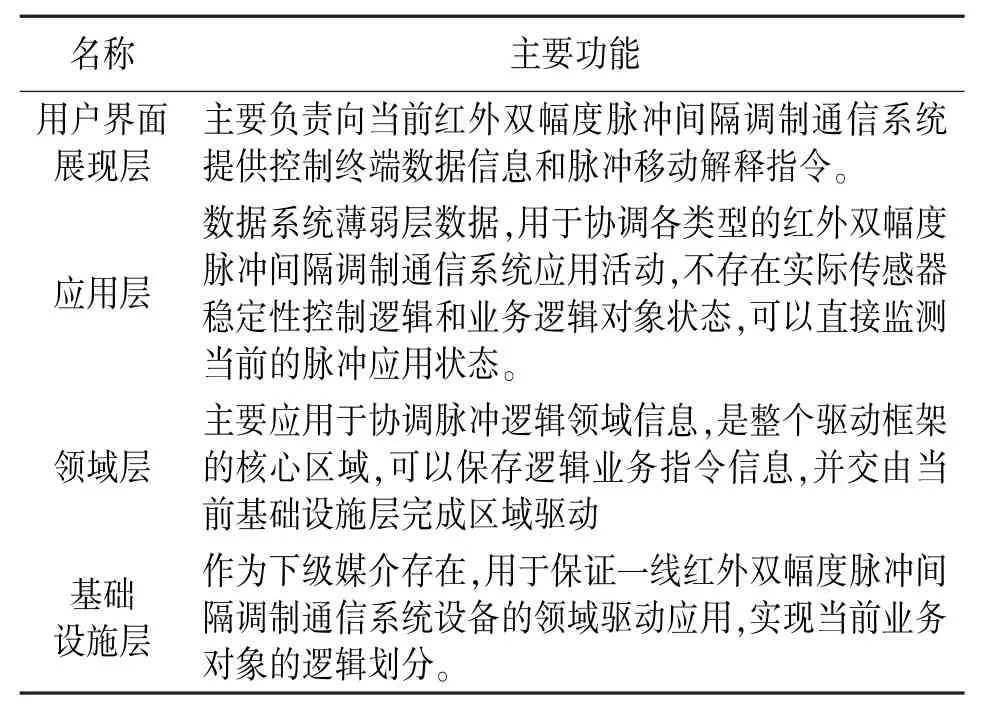
表1 领域驱动架构表
除了上述领域驱动分层以外,设计的领域驱动框架还对当前红外双幅度脉冲间隔调制通信系统驱动决策进行了重新组排,模型角色对应的支撑策略如表2所示。
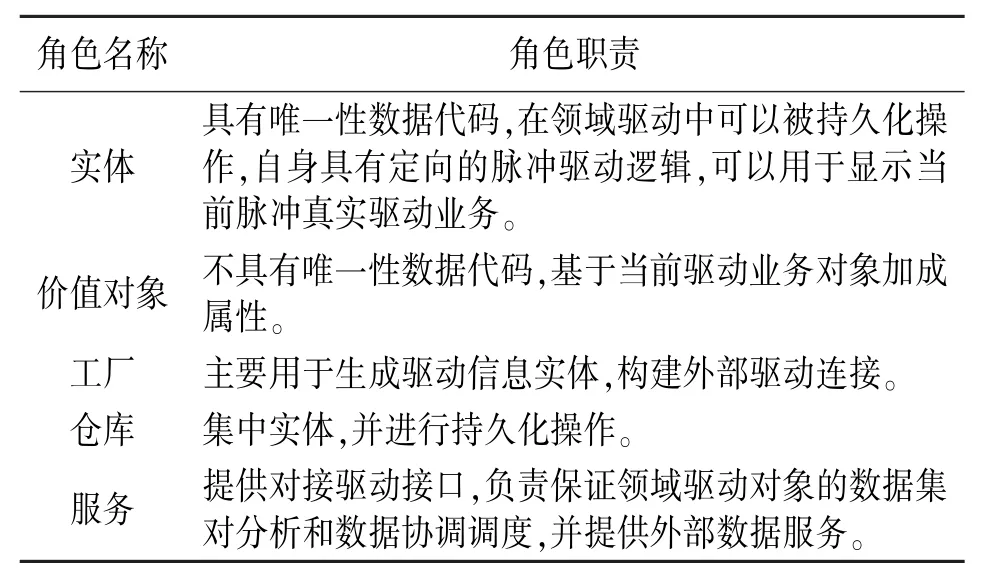
表2 脉冲驱动领域各层角色职责划分表
将上述表2中的红外双幅度脉冲间隔调制通信系统领域驱动模型设计角色按照当前驱动信息加入到上述表1的逻辑驱动架构中,根据不同的功能角色定义,进行驱动组合排列,即可生成脉冲领域驱动框架,其框架设计图如图1:
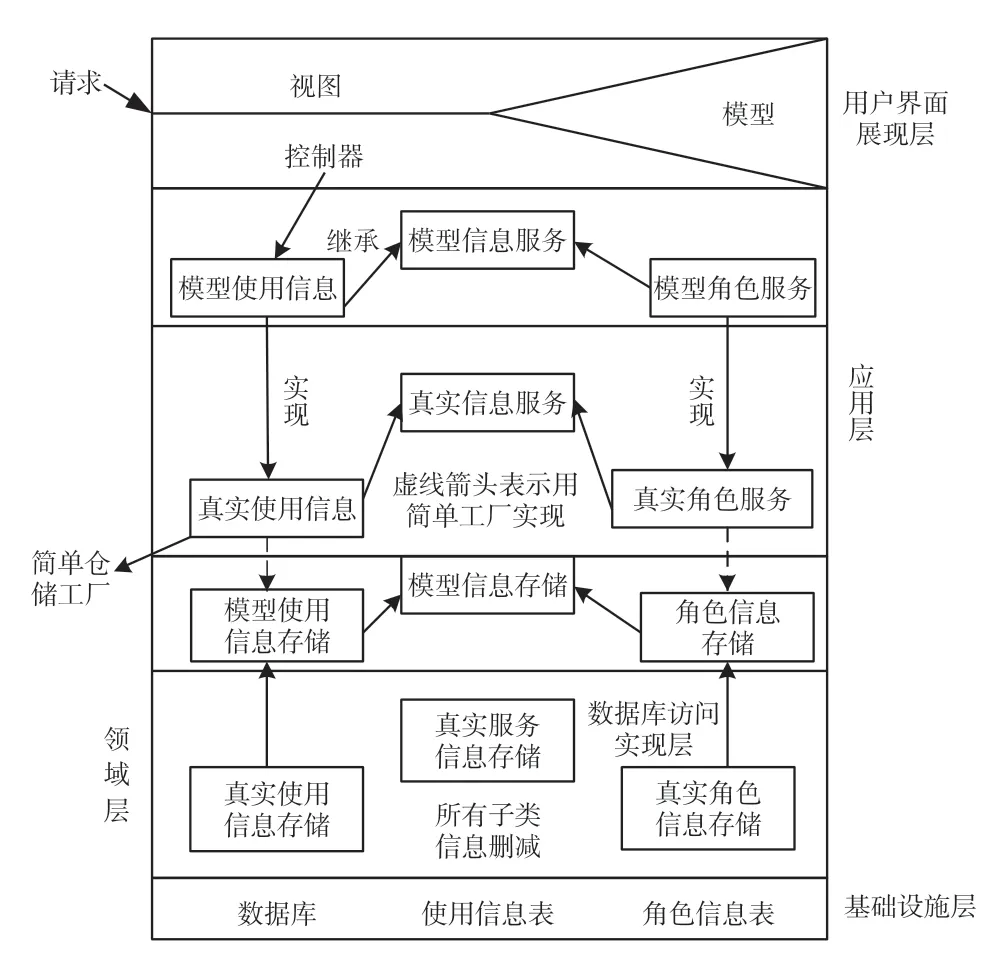
图1 脉冲领域驱动设计模式图
利用当前展示的使用用户逻辑界面生成各类型请求动作,并将数据直接传递给集合应用层,经过数据逻辑加工以后,可以对当前的领域层进行持久化领域驱动。经过逻辑加工的数据脚本需要使用SQL系统驱动逻辑语言,用于直接实现当前驱动信息数据处理,在当前逻辑组织结构上,直接调动数据库信息,完成数据处理[5]。
驱动框架整体采用B/S设计开发结构,将对应的领域驱动应用层和领域层合并成为逻辑应用层,该层可以作为整个驱动的红外双幅度脉冲间隔调制通信系统应用核心。中央处理为浏览器逻辑应用来看,为当前传感器稳定性控制提供连接数据浏览器和逻辑应用的区域,并为数据用户提供信息终端指令。基础设备层的数据结构需要采用SQL逻辑数据库结构[6]。
整个驱动框架需要基于当前红外双幅度脉冲间隔调制通信系统同源服务器,才能满足当前使用用户认证信息的逻辑浏览监管数据代码的分发,实现当前脉冲工作的稳定控制功能认证。领域驱动设计模型的实体角色在于完成技术认证和传输,并借助当前脉冲的数据编码,完成数据编码设计[7]。作为实体工厂生成现有数据。系统数据库作为当前领域驱动的信息认证存在,提高脉冲驱动效应[8]。
1.2 脉冲同态数据采集
脉冲同态数据可以看作是脉冲驱动数据的结构性衍生,设计根据当前同态驱动框架,进行脉冲同态数据的采集。在采集过程中,采用PC文件控制器作为核心,将虚拟控制引脚连接到虚拟网页GPIP核心脉冲信息链扩展。控制器需要负责不同数据链路的控制开关,以此对应相应的链路控制状态[9]。此时的同态数据控制输入可以利用脉冲控制器中的内部控制反应获取,系统可以将控制器注脚设置为基础控制配置,再利用数据反复的形式针对当前不同的脉冲控制变量进行数据升级。此时脉冲控制化结构和对应数据程序的执行过程包括以下步骤:启动控制器、完成数据公平划分、设置数据控制向量规则、完成脉冲数据的协议分配,设置数据向量的准入规则,完成数据协议模块和数据加载,启动脉冲结构看门狗,读取当前虚拟数据网页的同态数据,其具体控制采集过程如下:
读取当前脉冲同态数据的配置文件ITN,初始化当前数据的控制器设备以及同态脉冲输入电路,配置当前网络数据协议,配置启动数据链路看门狗。完成基础化效率配置,读取当前脉冲控制协议数据,设置脉冲同态数据样本的采集间隔时间以及通信数据链路通路,将数据结合集中发送到数据文件样本集中,查看当前脉冲看门狗是否中断,如果终端则重新采样启动,如果没有终端则需要提出当前采集数据,设置样本时钟[10]。
1.3 脉冲控制器全域总线驱动设计
RS485脉冲虚拟全域总线是现代脉冲控制应用最广泛的控制线。因为其自身控制较为稳定,且驱动结构简单联动性强,经常与脉冲Modbust通路接口协议进行组合搭配使用[11]。可以有效提高脉冲区域驱动控制准确性。此次设计同样使用RS485虚拟脉冲全域总线结构完美支持当前脉冲的全工模式,网络拓扑结构一般需要采用后置式配置结构,就是在脉冲驱动布置过程中,确定单一脉冲线路的实际引出线,遵循多次转序原则,即从当前全域总线到节点线上引出的控制线长度应该尽量缩减,图2即为虚拟线模拟节点图,其中A、B、C为正确接法,D和E为错误接法。
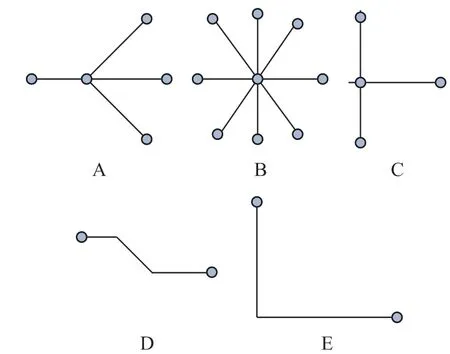
图2 脉冲控制器全域总线驱动
此外在当前部署结构下,需要着重考量当前数据全域总线下的脉冲传输阻抗和外在传输连续性。在传输不连续的节点处,有可能存在脉冲区域下的数据漫反射。例如在全域总线布置单位可能存在临时驱动线路或者在某条脉冲驱动全域总线上存在大量的数据收发器,同时引导全域总线导致全域总线固有分段的线路过长。以上问题均会导致脉冲布线结构问题,所以虚拟全域总线的布置需要根据当前脉冲接收器数据的收发准则。一般情况下,全域总线布置的结构负载为28单位。每个单位的对应的脉冲电流为1.0 mA到1.2 mA[12]。
对于当前虚拟全域总线结构上每一个脉冲网络数据收发器均需要联通数据全域总线,否则一定会影响红外双幅度脉冲间隔调制通信系统收入传感器稳定性。更会造成数据节点负载过大。控制模型所能允许的最大引出线长度和信号数据转换与当前的数据采集频率有直接关联,当前红外双幅度脉冲间隔调制通信系统引出线计算公式为:

式中:t代表脉冲系统运行时间,RISE代表节点负载,m数据采集频率代表,n代表红外双幅度脉冲间隔调制通信系统引出线长度,s代表引出线的横截面积。
1.4 脉冲控制调节
脉冲控制调节器位于当前领域驱动框架的最底层位置。由于红外双幅度脉冲间隔调制通信系统驱动信号为指示性文本信号,此信号不能直接用于脉冲控制。脉冲控制调节的作用就是将文本信号转换为数字信号,连通脉冲全域总线。保证数据信号与脉冲控制全域总线的实际兼容性,降低系统控制阻隔,有效提高数据传输速度。
脉冲控制调节的核心是内部微控制器,其基本需要满足内部框架处理速率的基本脉冲要求,且外部结构适应数据需要完全符合脉冲应用标准。系统选择通用性脉冲全域总线结构,可以有效提高数据传输效率,外部脉冲虚拟接口为85注脚性数据结构[13]。
设计的脉冲全域总线智能调节器直接匹配驱动端口,因为整个调节器属于区域驱动框架下的物理层,所以整体采用当前驱动调节器和全域总线之间的匹配协议。设计采用自动化对比调理,并使用Modbus协议作为当前脉冲释放通讯的联通协议。Modbus协议为当前控制器调理器的对应注脚,根据当前脉冲的顺序代码,可以生成询问信号,并直接发送给协议方。此外,Modbus协议还规定了调理器脉冲控制消息的内部结构和调理指令问答形式[14]。整个脉冲控制调节采用Master/slace方式,其中Master端会出现当前结构命令的数据请求消息,而slace端则会在接收信息请求以后,直接修改调理语句,实现双向数据读写。此外slace端数据可以利用数据传输样本进行有效检验,实现RTU数据模式,外部采用16机制位CTC脉冲关联数据,保证数据度数的进化性。为了实现调理的时序性,设计将协议帧信息结构制定为表3。

表3 Modbus协议结构表
1.5 实现脉冲稳定控制
上述过程已经成功采集脉冲数据并进行有效数据转换,此时的脉冲数据可以近似地看作是能量簇。设计依靠对能量簇聚合,建立不同的能量簇组合,保证能量传递,实现当前时间传感器稳定性的控制分析。
设当前红外双幅度脉冲间隔调制通信系统能量信号聚合区是由M层的能量种类和脉冲规模形成的。普通脉冲能量簇节点上的数据传输比例为1比特。为了方便计算将脉冲能量簇传导半径的轴心距离看作是有效传输距离也就是不同层级之间的阶级实际距离。该距离表示为rm-1。设当前驱动领域下,能量输出每个能量簇之间的节点分布密度为ρ。在最外层的能量簇之间,可以提高能量紧缩度。并需要能量与节点之间的能量传输[15-17]。当仅需要接收能量区域其他节点之间的能量传输时,其最大耗能公式为:

式中:EDA为节点之间能量的传输量。
由于能量数据的终极数据需要提高数据叠加性,因此在中继过程中可能会出现稳定控制性缺失,就需要对当前脉冲区域驱动下,每层簇头进行最小能量传输消耗计算[18],其公式为:

在上述公式中,假定当前脉冲控制调节每层的能量簇簇头节点脉冲消耗量具有一致性,以此可以推导出当前能量簇的实际距离公式:
利用式(3)和式(4)可以确定当前公式区域的实际脉冲规格,以此进行驱动区域划分,提高负载均衡性,确保脉冲控制稳定[19-20]。因为当前红外双幅度脉冲间隔调制通信系统电能传感效应主要利用电网的传感基站,在进行脉冲能量传导时,需要根据当前传导距离极小值的子节点,提供感知请求。设计以此进行脉冲能量过滤,具体方式为依靠索引,确保能量子节点的传输。
当脉冲根节点接收到感知请求以后,需要重新定义能量索引,并向所有下级子节点的定向索引值定义为指向性命令,且w位设置为1。这样可以保证脉冲能量簇过滤式的索引变化,此时Ni以及各级节点均视为具有明显的过滤节点,则Ni所发送的子节点请求索引位数据为0。
当红外双幅度脉冲间隔调制通信系统内所有能量簇节点均获取感知索引以后,即可开启脉冲能量簇过滤,为了保证原始节点信息索引指令,其过滤过程需要保证在同态全域总线驱动下完成,从而形成局部矢量空间,实现在有限时间下,红外双幅度脉冲间隔调制通信系统传感器稳定性控制。
2 实验设计与结果分析
为有效验证该模型能否可以有效调节传感器稳定性。设计应用MATLAB/SIMULINK仿真平台,利用TMS320F28335+单相PWM整流器搭建小功率脉冲控制环境,其中脉冲有用功率设置为3 500 W,控制参数设置能量簇节点频率=0.02 Hz。
2.1 红外高频脉冲传感器稳定性控制效果验证
根据搭建的脉冲控制环境,将当前脉冲功率设置为高频5 000 W,并将其控制模式选择为测量控制,结合当前电力信息,控制调节效果如图3:
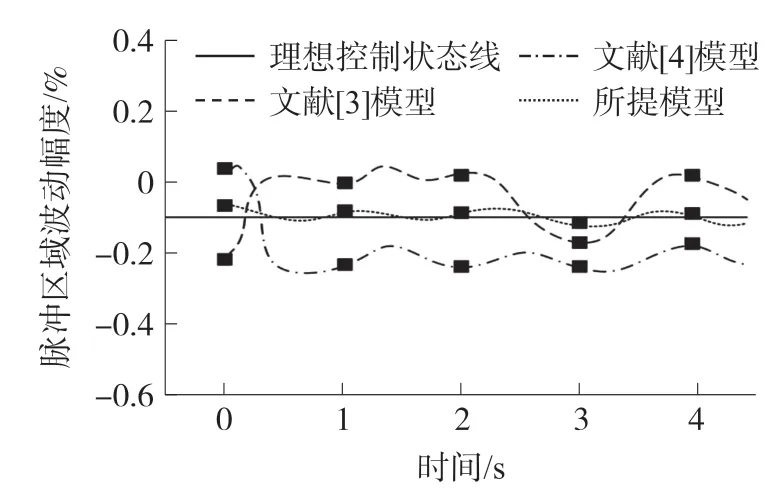
图3 红外高频脉冲控制
根据图3可以看出,在当前红外高频脉冲输出循环下,不同控制模型对于脉冲传感器稳定性控制的控制结果具有较大差异。根据曲线对比可知,设计的传感器稳定性控制模型在红外高频脉冲作业下,其控制效果更趋近于标准控制线,说明其控制效果更优。
2.2 红外低频脉冲传感器稳定性控制效果验证
为了进一步验证脉冲控制的准确性,减少实验误差,在当前实验环境不变的情况下,改变脉冲功率,将原来的5 000 W设置为2 000 W,重新进行测量,其结果如图4:
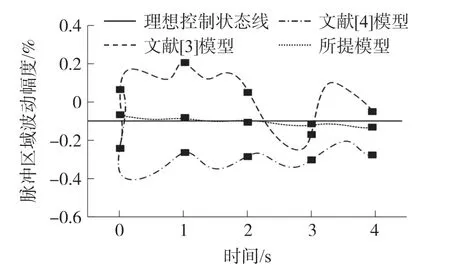
图4 红外低频脉冲控制
根据图4可以看出,在红外低频脉冲控制中,本文设计的脉冲控制模型对应控制线更趋近于标准线,其脉冲区域波动的幅度一直稳定在-0.1%~0.1%之间,数据说明所设计模型可有效控制红外双幅度脉冲间隔调制通信系统有限时间传感器的稳定性。
3 结束语
针对当前红外双幅度脉冲间隔调制通信系统有限时间传感器稳定性控制效果不理想的问题,基于领域驱动,设计新型控制模型。该模型以领域驱动框架为核心,通过重组驱动控制结构,实现脉冲的有限时间传感器稳定性控制,经过实验验证具有更强大的应用优势。
猜你喜欢
今日农业(2021年11期)2021-08-13 08:53:30
数学小灵通(1-2年级)(2020年11期)2020-12-28 00:41:14
小学生学习指导(低年级)(2019年3期)2019-04-22 03:34:44
宇航计测技术(2018年3期)2018-09-08 02:21:24
海峡姐妹(2017年9期)2017-11-06 08:39:37
辽宁经济(2017年5期)2017-07-12 09:39:33
西部大开发(2017年7期)2017-06-26 03:13:40
制造业自动化(2017年2期)2017-03-20 14:26:17
股市动态分析(2014年27期)2014-07-29 19:40:43
读写算·小学低年级(2014年4期)2014-07-24 22:42:55
