
一种提升空间三轴激光陀螺性能的谐振腔方案研究
2021-09-28 06:18陈军军韩育强
导航定位与授时 2021年5期
王 慧,陈军军,韩育强
(1.海军装备部装备审价中心,北京 100074;2.北京自动化控制设备研究所,北京 100074)
0 引言
新一代装备对光学陀螺的精度、体积和质量水平提出了更高要求,尤其是近年来面对各种新应用提出的“三自”等实用性提升的需求[1-3],旋转惯导系统成为了研究热点[4-5]。在总体体积有限的情况下,亟需解决惯性仪表高精度和小体积矛盾的问题。虽然激光陀螺已经成熟应用,但一套惯性测量单元需要安装3只单轴机抖激光陀螺,系统的体积、质量较大,新型装备的智能化、小型化、高精度的需求亟需空间三轴机抖激光陀螺技术实现突破。
空间三轴机抖激光陀螺属于机械抖动偏频类的二频陀螺,空间三轴机抖激光陀螺技术,也是单轴机抖激光陀螺技术的集成创新,即用整体结构方式将3只单轴激光陀螺集成于同一基体上,构成三轴正交的激光陀螺系统。因此,这种空间三轴机抖激光陀螺的研究需要基于单轴的技术基础,同时还需要解决该型陀螺独有的空间三轴谐振腔精密加工、互相关调腔、交叉稳频等关键技术,这种三轴机抖激光陀螺组合(含1只三轴机抖激光陀螺)与单轴激光陀螺组合(含3只单轴机抖激光陀螺)相比,优越性主要表现为:零件少、体积小、质量小、结构紧凑、抗振性强等。
“十一五”以来,空间三轴机抖激光陀螺的研究取得了长足的进步[6],相关研究深入开展[7-9],推出了典型空间三轴机抖激光陀螺产品,在体积、质量及工程化水平上不断实现提升,但是在精度上仍然无法满足某些惯导系统提出的苛刻要求。当前一些应用领域亟需空间三轴激光陀螺在保持或减小体积和质量的前提下实现精度的进一步提升。
当前关于国外空间三轴激光陀螺的应用有诸多报道[10-11],精度0.001(°)/h~0.003(°)/h的空间三轴激光陀螺已实现突破。国内的空间三轴机抖激光陀螺若要实现精度的进一步突破,首先需要围绕空间三轴谐振腔这个三轴角速率测量敏感单元开展攻关。本文主要探讨了一种空间三轴谐振腔改进方案,可提升空间三轴机抖激光陀螺精度,进一步扩展其在海陆空天领域的应用范围。
1 空间三轴谐振腔
图1所示为单轴机抖激光陀螺谐振腔的基本结构,内部运行闭合光路围成四边形,工作时,放电电流分别从2个电极A1和A2流向K1,以内部2个箭头示意。
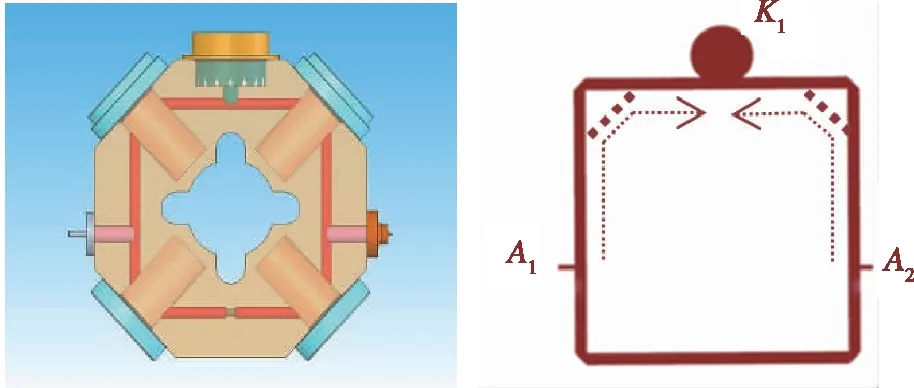
图1 单轴激光陀螺谐振腔基本结构
三轴谐振腔基于单轴谐振腔进行构建,以应对不断提升的小型化设计需求,三轴激光陀螺在一个基体上实现了3个通道的集成,包括以下步骤:
1)当空间上3个正交的方形光路两两通道之间的交汇点在一个点实现重叠时,3个通道集成时所占用空间体积达到最小值,如图2所示。此时陀螺的光路结构为最优集成,光路通道间两两共用反射镜,相比3个四边形陀螺其反射镜数量减少了50%,形成了空间三轴激光陀螺的基本光路结构。由于2个通道光路在共用反射镜的光路交汇,除考虑单通道陀螺光学块体误差之外,该型陀螺的光学设计还需要考虑该误差的分配是否具有可实现性。经过多年的加工工艺摸索和研究,现有国内外加工工艺技术能力已具备。可以看出,上述特点使空间三轴激光陀螺的光学块体具备小型化集成基础。
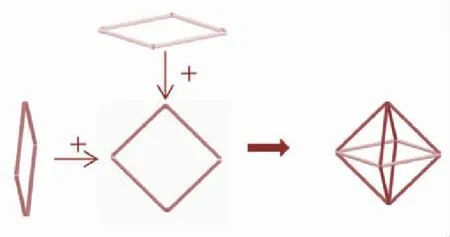
图2 3个正交四边形光路集成
2)在立方体结构的基础上,开展光学块体外形构建分析,为保证激光陀螺具备足够的激光功率输出,结合光路孔参数和反射镜参数完成3个通道放电区域的布置。为了确保基体具有较小的体积和质量,需要切除立方体结构,较为简单的方案是通过设计每一个通道与经典的四边形单轴激光陀螺相似的结构,形成一种空间三轴激光陀螺光学谐振腔结构。
如图3所示,相比某国内第一代对外引进型的光路孔不连通的激光陀螺三轴方案(图4),在光路长度相同的情况下,空间三轴方案谐振腔的综合体积和质量大为减小。这是因为不同通道的微晶玻璃基体在空间上实现了最大程度的体积共用。
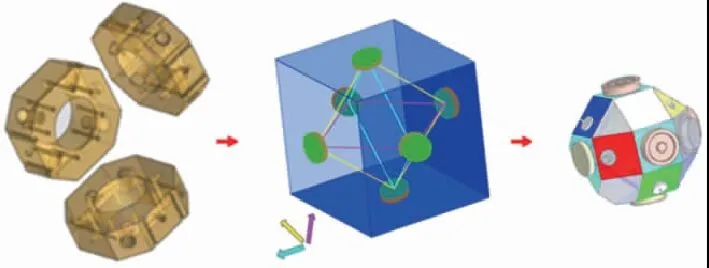
图3 空间三轴光学谐振腔构建
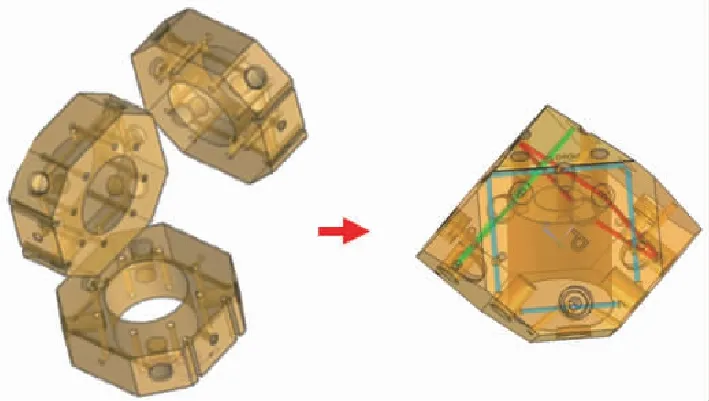
图4 一种三轴光学块体结构(12个反射镜)
上述的谐振腔实现了完整的构建,还需要结合外围三轴共用的机械抖动组件和稳频驱动组件等各项设计开展合理布局。为了使空间三轴机抖激光陀螺产生机械抖动,需安装一个与3个敏感角度均为54.7°的三轴共用抖动系统以完成抖动偏频;由于空间三轴激光陀螺通道之间光路的反射面重合,在反射镜公用条件下需完成3个光路腔长的同步补偿和控制。
空间三轴激光陀螺基于元件共用的思路,极大地节省了零件数量且减小了陀螺体积和质量,符合高精度惯导系统对核心器件小型轻质化、低成本发展的要求。而要形成结构紧凑且面向更高精度领域应用的空间三轴激光陀螺,还需要解决多个空间三轴激光陀螺独有的技术难题,才能进一步实现在高精度领域的突破。由于空间三轴谐振腔内气体介质互相连通,当其任意2个通道放电存在耦合时,将引入零偏误差,限制了其精度的提升,是当前空间三轴激光陀螺研究独有的问题之一。
2 通道耦合零偏及零偏漂移问题分析
2.1 耦合零偏及零偏漂移问题
研制的某型空间三轴激光陀螺已达到导航级精度,以其为研究对象。对图3所示的空间三轴谐振腔的基本光路和放电结构部分进行分解,得到陀螺3个通道的四边形基本结构,如图5所示。图6所示为空间三轴激光陀螺放电控制示意图。
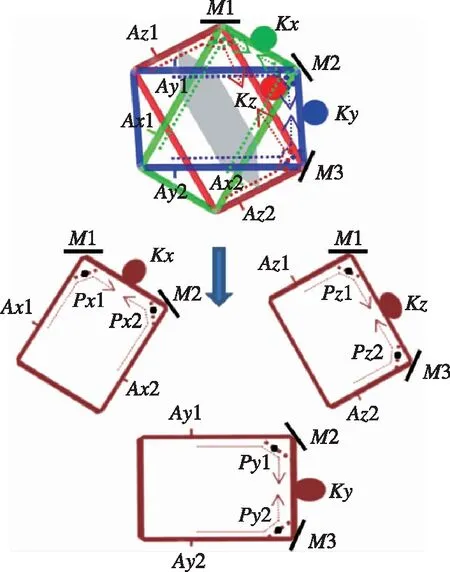
图5 空间三轴谐振腔通道分解
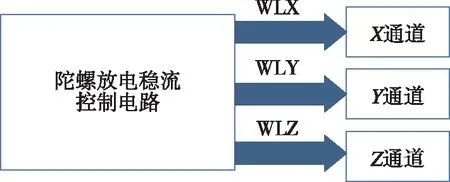
图6 空间三轴激光陀螺放电控制系统示意图
定义X通道为包括了阴极Kx、阳极Ax1和阳极Ax2的通道,Y通道为包括了阴极Ky、阳极Ay1和阳极Ay2的通道,Z通道为包括了阴极Kz、阳极Az1和阳极Az2的通道。M1、M2、M3分别为陀螺X、Y、Z这3个通道两两共用的反射镜。Px1为X通道由Ax1流动到Kx的放电区中离M1最近的点,Px2为X通道由Ax2流动到Kx的放电区中离M2最近的点。Py1、Py2、Pz1、Pz2同理分别为Y、Z通道相应离发射镜最近的点。当3个通道同时工作时,在Px1、Px2、Py1、Py2、Pz1、Pz2点附近区域交汇(耦合放电的区域大小与放电管路相关)且有Px1=Pz1,Px2=Py1,Py2=Pz2。
一般情况下,控制上实现陀螺X、Y、Z通道的各自通道双臂稳流,结合图5和图6,空间三轴激光陀螺的放电状态可以分为三种情形:
1)任意3个通道仅1个通道放电工作,以X为例,通过控制X通道正常放电工作且控制Y、Z通道关闭放电回路。单独放电工作1个通道时,不存在通道间耦合放电,Y、Z通道相类似。
2)当陀螺3个通道中的2个通道放电工作时,以X和Y通道放电工作且Z通道不放电工作为例,在Px2(Py1)点附近区域存在耦合放电,而在Px1(Pz1)和Py2(Pz2)由于Z通道不放电工作,即对于X和Y通道,各自的两臂都为不对称放电状态,其他双通道放电情况也类似。
3)当3个通道全部放电工作时,3个通道在Px1(Pz1)、Px2(Py1)和Py2(Pz2)附近区域存在耦合放电,但左右两臂基本对称。
首先,测试上述第二种情况下陀螺3个通道零偏,曲线如图7所示。
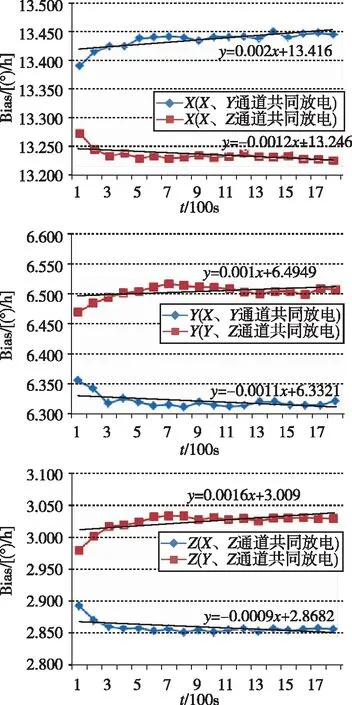
图7 双通道放电静态零偏输出曲线(含地速输入)
图7中给出了陀螺输出与时间线性拟合的常值及斜率,可以得出如下结论:
1)从零偏值看,陀螺在双通道放电与三通道同时放电的状态相比,以双通道X、Z和X、Y放电为例,X陀螺零偏会产生一个很大的常值零偏,最大可达0.2(°)/h,由于测试是在静态条件下开展的,因此这种大的零偏不是真实输入值。
2)从拟合的零偏趋势斜率情况看,当2个通道同时放电工作时,零偏漂移趋势较大,最大输出变化可达0.07(°)/h,统计的零偏稳定性远超出陀螺的实际精度。
进一步研究放电的另外两种情况,以X通道为例,测试得到单通道放电和三通道2个状态下放电的陀螺零偏输出曲线如图8所示。由图8可以看出,在3个通道同时放电工作时,零偏漂移大。为了进一步描述零偏漂移量,表1统计了前5min和后5min的零偏漂移值。零偏的变化将对系统的性能造成损失,因为在用户实际使用条件下,当空间三轴的任意一个通道零偏漂移至不满足系统提出的指标要求时,则判定为产品不合格,这是因为任意通道精度超差都会影响惯导系统的使用精度。
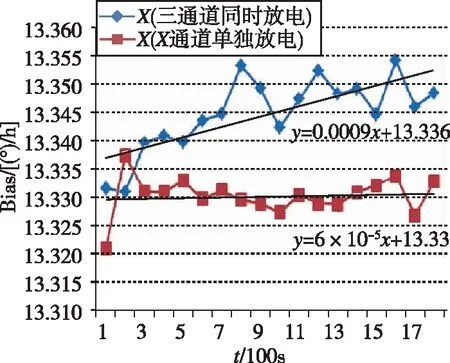
图8 不同放电状态X通道静态零偏输出曲线(含地速输入)
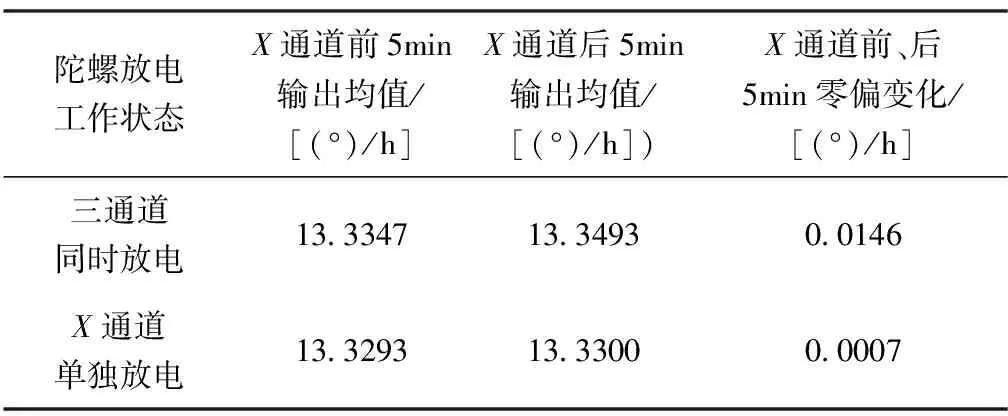
表1 X通道单向漂移统计
综上所述,三种放电工作情况,对陀螺X通道零偏和零偏趋势的影响程度分别为:双通道放电比三通道放电影响大,且都比单通道放电影响大。对于陀螺Y、Z通道该现象同样存在。空间三轴激光陀螺的零偏和统计的零偏稳定性都受到放电耦合的影响,陀螺精度的提升需开展放电的进一步研究。
2.2 耦合零偏及零偏漂移机理分析
激光陀螺采用直流放电激励气体介质,由于直流放电的作用,不可避免地在放电管中产生方向性气体流动,定向的流动本身会带来非互易效应,从而引入零偏漂移[12-14],也是二频类激光陀螺零偏影响最主要的误差之一。一般地,单陀螺放电时两臂电流分别为i1和i2,零偏漂移项可以用式(1)表示[15]
(1)
其中,k为波数;A为比例因子修正项;G0为增益;a为放电管半径;φ为光束轴线相对放电毛细孔轴线的倾斜角;z0φ2为倾斜角零偏影响系数;β1和β2为放电管两臂的管型特征量;Δω0为高斯光束在放电管中相对管中心轴的平均偏移量。
当腔与调整管调整良好且高斯光束通过管心时,φ和Δω0都很小,则
(2)
因此,当采用对称结构β1=β2,理想情况下,控制i1=i2,该误差项就可以得到消除。对于精度较高的激光陀螺,两臂电流稳定性要求是基于控制该项误差需求产生的,需要根据放电管加工对称精度,对陀螺的零偏性能需求进行调整。
同样,分析空间三轴机抖激光陀螺,零偏受到直流放电影响,且由于空间三轴内部的介质是连通的,不同放电状态的耦合情况更复杂一些,参考式(1),研究空间三轴激光陀螺的X通道,在不同工作状态下对其进行一般性描述,零偏误差可表述为
(3)
其中,βx1z1和βx2y1为交叉放电部分的管型特征量。
当φ和Δω0很小时,式(3)可简化为
βx2ix2-βx2y1iy2)
(4)
分三种情况进行估计和分析:
1)在仅有X通道放电时,iz1=iy2=0,βx1z1iz1=βx2y1iy2=0,X通道通过稳流控制,则ix1=ix2,ΔvLx=0;
2)当2个通道放电时,iz1=0,iy2≠0或者iy2=0,iz1≠0,此时对应βx2y1iy2≠0,βx1z1iz1=0或βx1z1iz1≠0,βx2y1iy2=0,ΔvLx是一个大的误差项,在双通道X、Z和X、Y放电2个不同状态下,引入附加零偏的正负都会发生翻转,可达0.2(°)/h;
3)当3个通道同时放电时,对于X通道,iz1≠0,iy2≠0,考虑谐振腔设计以及工作电流设置差异在一个固定区间,即βx2y1≈βx1z1,一般有iz1≠iy2(主要由稳流回路Y、Z通道的控制电压精度决定,实测二者相近,一般差值不大于30μA),|(βx1z1iz1-βx2y1iy2)|≪|(βx1z1iz1+βx2y1iy2)|且|(βx1z1iz1-βx2y1iy2)|一般为一个较小的值。
从上述分析可以看出:
1)1个通道工作放电时误差引入最小,2个通道工作时影响最大,3个通道工作时影响次之,这就解释了上述2个通道工作时零偏值变化大的实验现象。
2)控制ΔvLx的关键在于控制iz1=iy2,ix1=ix2和βx1=βx2,βx1z1=βx2y1,拓展到Y、Z通道,即应保证6个放电结构加工以及6个放电臂的工作电流一致。
3)要指出的是,在实际工程实践中,光路参数随着工作时间发生变化,研究人员针对补偿激光陀螺领域开展了大量的工作。本文中,在外界环境稳定的情况下,由于(βx1z1iz1-βx2y1iy2)≠0,空间三轴激光陀螺的谐振腔3个通道放电的光路相比单通道放电状态随时间变化大,相应地,零偏变化量即趋势项也大,与试验现象相符。
3 谐振腔方案优化
通过上述定性的计算,研究分析了空间三轴放电耦合对零偏以及零偏漂移的影响,最终,从优化空间三轴激光陀螺的放电系统结构考虑消除耦合项,即控制βx1z1=βx2y1=0。
基于此,优化空间三轴谐振腔布局,图9所示方案(Ka、Kb、Kc为3个电极位置,并以箭头标记了由阴极到阳极的多个放电路径)与图4所示原有方案的陀螺相比,主要差异为通过优化布局电极和放电结构,最大程度地避免了原方案存在的放电臂耦合干扰问题。
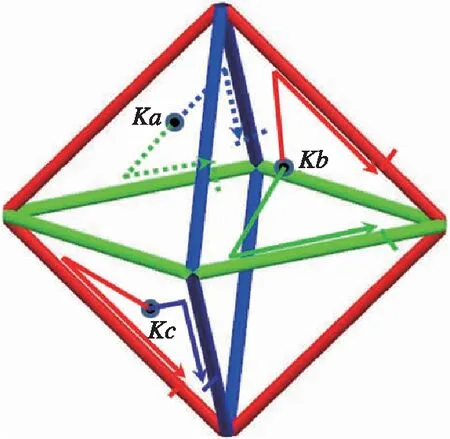
图9 空间三轴谐振腔布局优化方案示意图
4 试验验证
制作了兼容图4以及图9两种方案的空间三轴机抖激光陀螺样机,研制了空间三轴激光陀螺放电试验控制回路,根据式(5),为了减小电流误差项,静态条件下可控制任意电流差在0.3μA水平。该陀螺封接了6个阴极,当需要测试图4方案的陀螺性能时,电气上接原方案的3个阴极;当需要测试改进方案的性能时,电气上接图9方案的3个阴极。两种方案状态下,陀螺测试曲线对比情况如图10所示,新方案的空间三轴激光陀螺样机精度提升了5.7%~27.1%,如表2所示。
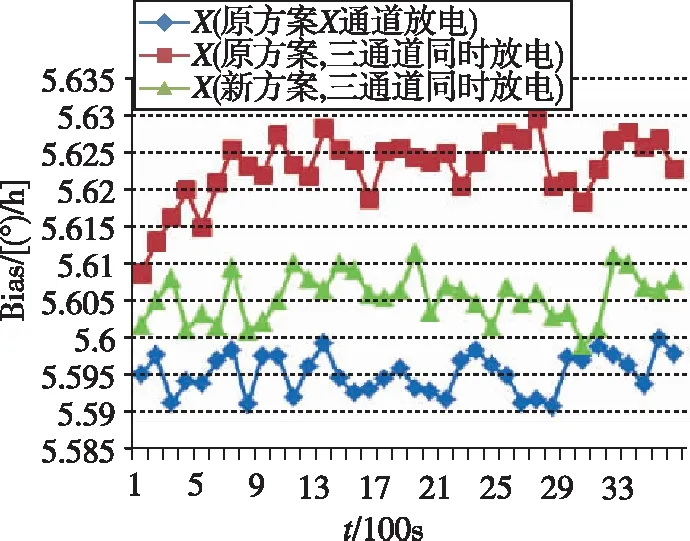
图10 新样机不同放电状态零偏输出曲线(含地速输入)
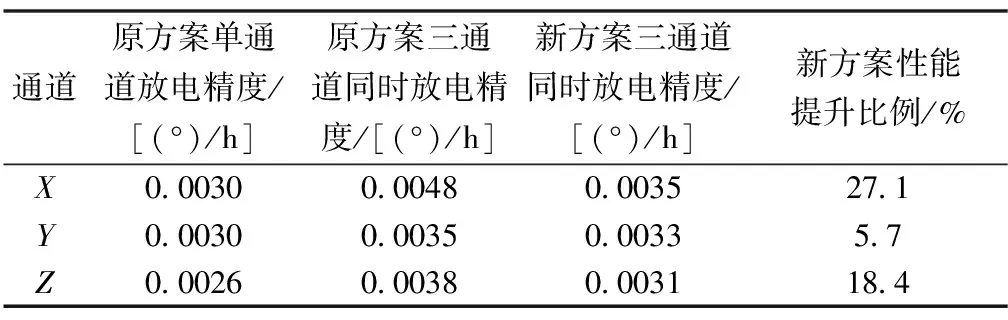
表2 新样机不同放电状态数据
表2表明,本文提供的放电控制及优化方案可实现空间三轴激光陀螺精度的显著提升。
5 结论
本文针对空间三轴机抖激光陀螺因通道间放电耦合引入了零偏误差导致陀螺性能损失的问题,计算了高精度空间三轴激光陀螺对放电电流控制的要求,并提出了空间三轴谐振腔改进设计方案,结果表明:
1)高精度空间三轴机抖激光陀螺需保持陀螺3个通道共6个放电臂电流的一致稳定控制,且建议控制零偏电流灵敏度与该电流稳定性的乘积比陀螺零偏稳定性小1个数量级。
2)基于消除放电耦合提出了空间三轴谐振腔改进设计方案,开展的性能试验验证结果表明,空间三轴机抖激光陀螺的精度提升了5.7%以上。
3)本文提出的空间三轴六臂一致性电流控制方案的电路规模有所增加,如何进一步使电路集成以提升实用性,还需要进一步开展研究;另外,改进方案的陀螺3个通道提升精度比例存在一定差异,在更大程度上提升空间三轴激光陀螺的实际使用精度,还需要开展进一步深入研究。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
机械工业标准化与质量(2022年8期)2022-10-09
小猕猴智力画刊(2022年4期)2022-05-23
农业工程学报(2022年4期)2022-04-24
汽车工程师(2021年12期)2022-01-17
智能制造(2021年4期)2021-11-04
北京航空航天大学学报(2021年9期)2021-11-02
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
故事作文·高年级(2016年6期)2016-06-21
早期教育(美术教育)(2010年4期)2010-04-13
