
面向柔性低频输电的模块化多电平矩阵变换器分频分层控制
2021-09-25 07:34吴小丹朱海勇董云龙
电力系统自动化 2021年18期
吴小丹,朱海勇,董云龙,田 杰,卢 宇,杨 晨
(南京南瑞继保电气有限公司,江苏省南京市 211102)
0 引言
分频输电(fractional frequency transmission system,FFTS)是一种低频输电方式[1-6],主要针对远距离水电和风电的接入,将传统50 Hz工频交流输电改为50/3 Hz的分频输电。传统工频高压交流输电输送容量受长距离输电线路容升效应限制,而低频输电通过降低输电频率以减小线路电抗,在提高线路输送容量上相较于高压交流输电更具优势[6-7]。低频输电也适用于中远距离海上风电等新能源的送出[8-9],相比于柔性高压直流输电用于海上风电送出,低频输电无须建设造价高昂和维护复杂的海上换流站,是颇具竞争力的中远海上风电送出方案[8]。此外,低频输电对解决柔性高压直流输电中切断直流侧短路电流困难[10]、高压电缆空间电荷积累引起电缆绝缘下降等问题更具优势[11]。而将基于全桥结构的模块化多电平矩阵变换器(modular multilevel matrix converter,M3C)用于低频输电则可以直接实现交交变频,且具有模块化设计、工频及低频两侧功率因数可控、动态响应快及潮流控制灵活等优点。目前,国内外尚无基于M3C的低频输电实际工程投入运行。研究基于M3C的低频输电面临的一系列共性问题,对推进柔性低频输电系统的发展具有重要意义。
M3C在正常运行时,输入和输出侧不同频率的电压和电流会在桥臂内产生双频功率耦合,造成桥臂电容电压复杂的波动现象和开关过程[12-15]。其控制关键在于9个桥臂功率模组电容电压的稳定及功率送出。目前广泛应用的M3C控制方法基于双αβ坐标变换[16-19],通过在静止坐标系下对9个桥臂的工频及低频分量进行控制,实现所有桥臂功率模组电容电压的稳定。文献[20-22]通过调节桥臂低频环流在实现M3C桥臂功率模组电容电压均衡的同时,实现了输入和输出侧电流的正序特性。由于M3C桥臂内各频率三相环流之和严格约束为零,可以视M3C的工频侧和低频侧均为三相三线制系统。因此,工频侧和低频侧在旋转坐标系和静止坐标系下的控制是等效的。基于此,文献[23]提出了工频和低频侧的M3C解耦控制策略,两侧均可以视为3个星形子变流器的并联,但该方法中桥臂环流仍还有不同的频率分量。
在实际工程应用中,成套低频输电系统在启动初始阶段低频侧处于无压状态,且用于定低频电压的M3C换流站低频侧锁相环为自产方式,在低频侧发生不对称故障时会影响调节低频环流实现桥臂电容电压均衡控制的效果。同时,使用低频环流控制也会带来桥臂电流应力增加的不利影响[22]。为此,本文提出工程应用中适用于基于M3C的双端和多端低频输电系统组网的分频分层控制策略。通过dq旋转坐标系下的工频负序电流注入控制实现M3C相间桥臂电容电压均衡,并通过微调桥臂工频环流实现相内并联桥臂电容电压均衡。低频侧则通过在dq旋转坐标系下的控制实现低频交流电压的构建或功率的送出。根据对M3C相单元瞬时功率的分析,仅用2种不同频率的滑差滤波器即可实现桥臂电容电压直流分量的提取和均衡控制,通过构建基于M3C的双端低频输电PSCAD/EMTDC仿真模型验证所提策略的有效性和可行性。
1 M3 C电路及工作机理
1.1 M3C电路结构
图1为M3C的电路结构图。M3C共含有9个桥臂,从工频侧和低频侧看,M3C每相均含有3个桥臂,每个桥臂由N个全桥子模块(sub-module,SM)与桥臂电感Lbg串联而成。ux和ix(x=a,b,c)分别为工频侧相电压和相电流,工频周期为Ts,频率为fs。ul,y和il,y(y=u,v,w)分别为低频侧相电压和相电 流,低 频 周 期 为Tl,s,频 率 为fl,s。工 频 侧 和 低 频 侧电流均以流入M3C为正方向;ixy为流过桥臂xy的电流,其正方向定义如图1所示。

图1 M3C的电路结构Fig.1 Circuit structure of M3C
图1中,从工频侧看,输出和同一个低频侧电源相连的3个桥臂可以称为工频侧子变流器。例如,桥臂au、bu、cu构成接入u相的工频侧子变流器(以下简称“u子变流器”,其他相以此类推)。因此,从工频侧和低频侧看,M3C均可以看成是3个子变流器的并联。
1.2 双频功率耦合机理
为分析M3C实现频率变换和功率耦合的机理,以u子变流器拓扑为例进行说明,如图2所示。
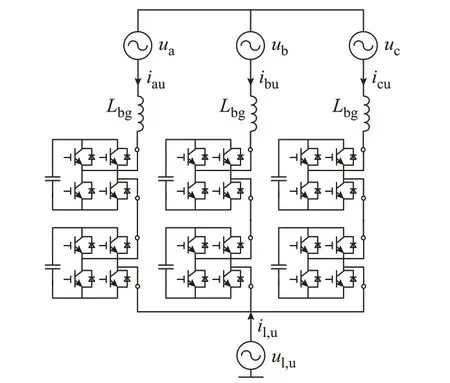
图2 u子变流器拓扑Fig.2 Topology of u sub-converter
正常运行时,从工频侧注入M3C低频侧u相的三相工频电流之和为零,而u子变流器的3个桥臂中必须含有同相位的低频电流,因此从u相送出的电流将只含有低频电流。类似的,由于u子变流器3个桥臂的一侧接入工频电压,另一侧接入低频电压,各桥臂也将同时承受工频电压和低频电压。以au桥臂为例,假定其桥臂电压和桥臂电流为:
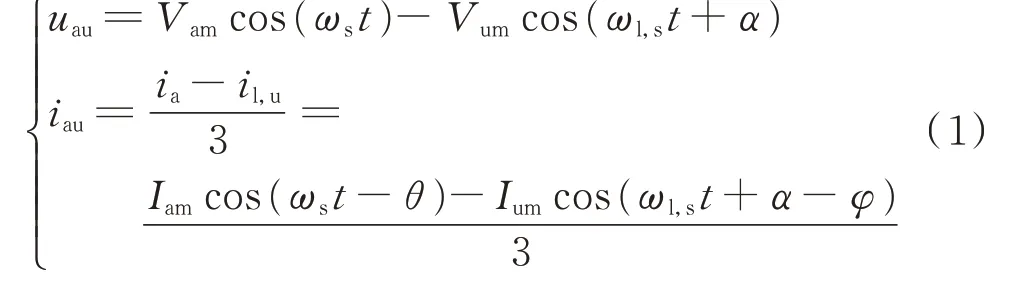
式中:Vam、Vum分别为工频侧和低频侧相电压幅值;Iam、Ium分别为工频侧和低频侧相电流幅值;α为低频侧u相电压初始相角;θ为桥臂的工频电流滞后工频电压的角度;φ为桥臂的低频电流滞后低频电压的角度;ωs和ωl,s分别为工频系统角频率和低频系统角频率。
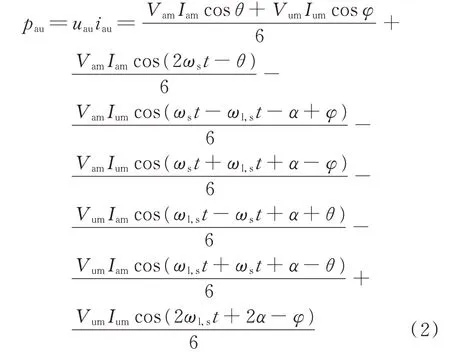
au桥臂的瞬时功率为:
桥臂瞬时功率中的直流分量即为au桥臂吸收的有功功率:

忽略桥臂损耗,M3C处于稳定运行时有:

当au桥臂功率关系满足式(4)时,工频侧a相通过au桥臂送入的有功功率可以实现从低频侧u相完全送出。由式(2)也可以看出,au桥臂将同时含有2fs、fs-fl,s、fs+fl,s及2fl,s共4种频率的功率波动[14]。这些频率的功率波动会在桥臂功率模组的直流电容上形成对应频率的电压波动。因此,在M3C的设计中,适当增大功率模组直流电容值以降低电容电压波动的影响是必要的。
式(1)—式(4)针对au桥臂给出了M3C的双频功率耦合机理,对其他桥臂的分析类似。
1.3 分频控制的理论基础
M3C在系统对称及不对称运行时,需要确保:①工频功率不能耦合至低频侧,即低频侧不能出现工频电流;②低频功率不能耦合至工频侧,即工频侧不能出现低频电流;③非工频及低频的其他频率的功率波动只能在换流阀内部实现耦合,即表现在桥臂功率模组直流电容电压叠加有不同耦合频率的交流波动。
基于上述分析,在对M3C设计控制策略时,可以分别在工频侧及低频侧实现解耦,并将解耦控制的输出互相叠加并作用于桥臂上,最终实现桥臂电流控制、功率模组电容电压的稳定及功率的送出[23]。在对工频侧进行控制时,可视低频电源电压为零,M3C运行时从工频侧注入M3C的电流均分,则工频侧的电压回路方程为:

式中:ua,M3C、ub,M3C、uc,M3C分别为从工 频侧看u、v、w子变流器三相桥臂需产生的工频控制电压。
同样的,在对低频侧进行控制时,可视工频电源电压为零,M3C运行时从低频侧注入M3C的电流实现均分,则低频侧的电压回路方程为:
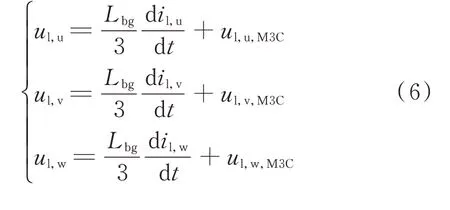
式中:ul,u,M3C、ul,v,M3C、ul,w,M3C分别为从低频侧看a、b、c子变流器三相桥臂需产生的低频控制电压。
根据式(5)及式(6),利用dq旋转坐标系下的矢量控制可分别实现对工频侧和低频侧的解耦控制,并将产生的工频及低频电压控制调制波互相叠加,进而实现对桥臂电流及模组电容电压的控制。该方案类似模块化多电平换流器(modular multilevel converter,MMC)的控制策略,只是将下发MMC桥臂的调制波中反映直流电压控制特征的信号替换为反映M3C低频控制特征的信号[24]。
和双端及多端基于MMC的高压直流输电系统类似,在基于M3C的低频输电系统中,通常是其中一个M3C处于定低频侧交流电压控制,其他M3C处于定功率控制。为实现M3C工频侧和低频侧控制上的解耦,提出M3C功率的分频分层控制:①工频侧实现9个桥臂电容电压的稳定控制,共分为4层控制,设计为层次化逐级控制,其中桥臂低频环流不参与桥臂电容电压控制;②低频侧实现有功功率送出,同时可控制低频侧送出电流的负序分量为零。
2 分频分层功率平衡控制
2.1 控制原则
M3C各桥臂的直流电容电压控制是实现交交变频的关键。当电容吸收有功功率时,电容电压上升;当电容释放有功功率时,电容电压降低。因此,在对桥臂直流电容电压控制时,仅需对有功功率进行分析。根据分频分层功率控制的思路,将M3C桥臂电容电压的逐级控制进行如下划分。
工频侧的第1层控制:实现9个桥臂电容电压总和的控制。该层控制通过在工频侧调节吸收总有功电流注入M3C实现。该层控制将决定M3C和工频交流系统的总有功功率交换[19]。
工频侧的第2层控制:如图1所示,在第1层控制实现的基础上,从列方向看,实现a、b、c相所含3个桥臂功率模组电容电压总和的相间均衡。该层控制通过在工频侧调节工频负序电流注入M3C实现。第1、2层控制均在dq旋转坐标系下通过控制工频侧输入电流实现。
工频侧的第3层控制:如图1所示,在第1、2层控制实现的基础上,实现从行方向看a、b、c相3个并联桥臂各自所含功率模组电容电压总和的相内均衡。该层控制通过在a、b、c相的3个桥臂内微调工频环流实现。由于a、b、c相桥臂内的工频环流之和为零,因此第3层控制对第1、2层控制无任何影响。
通过工频侧的3层逐级控制,实现M3C的9个桥臂电容电压稳定。在3层逐级控制过程中并不引入低频侧输入电流及桥臂低频环流,因此可以实现工频侧和低频侧在功率控制上的解耦。此外,桥臂内功率模组的电容电压平衡也需附加控制,由于M3C桥臂同时承受工频电压和低频电压,桥臂功率模组数目较多,该层控制可由最近电平逼近控制实现。
低频侧控制实现低频侧有功功率的送出,该层控制决定M3C和低频交流系统的总有功功率交换。在M3C处于稳定运行状态且不考虑换流阀损耗时,从工频侧和低频侧端口看,有功功率的送入和送出应保持平衡,且两侧的无功功率互相解耦。
2.2 工频侧相间功率平衡控制方法
在dq旋转坐标系下,与两电平变流器及MMC等具有直流侧公共母线的变流器拓扑不同[25],M3C各个桥臂功率模组分立运行,在工频侧交流系统发生不对称故障时,若在工频侧仅控制输入正序电流至M3C,则a、b、c相3个并联桥臂功率模组电容电压总和会发生偏差。这一问题可以通过在工频侧注入特定负序电流解决。
为推导工频侧注入负序电流指令的生成原理,基于功率模组数学模型进行分析。由于M3C使用的是全桥电压源型变流器,为给出M3C相间直流电容电压和工频负序电流之间的关系,需分析实际流入全桥功率模组直流侧的工频电流与该模组直流电容电压变化的关系。由于全桥功率模组开关函数的作用,实际流经模组直流侧的工频电流和工频侧输入交流电流并不完全等效[25]。以a相桥臂为例,功率模组拓扑见附录A图A1,有:

式中:ia(t)和i′a(t)分别为a相工频侧交流输入电流和流入桥臂功率模组的等效工频侧交流输入电流;da(t)为工频侧a相桥臂功率模组占空比函数。
由于工频侧交流输入电流和开关函数均含有正、负序分量,da(t)和ia(t)可以分别表示为:

式中:da+(t)、da-(t)分别为工频侧a相桥臂功率模组占空比函数的正、负序分量;ia+(t)、ia-(t)分别为工频侧a相输入电流的正、负序分量。
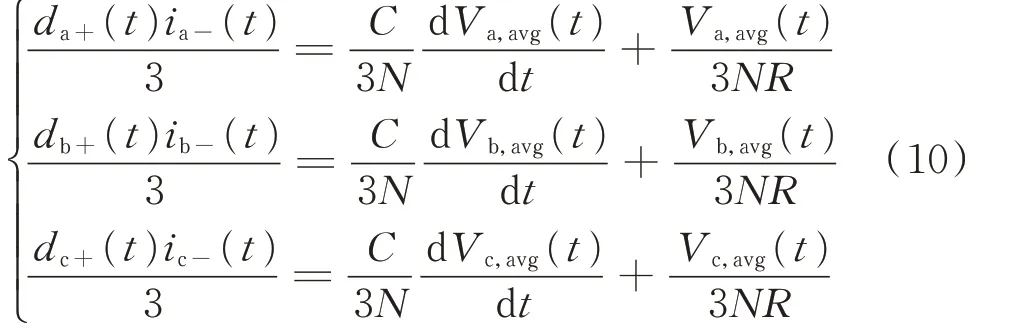
从工频侧看,各相含有3个桥臂,共计有3N个功率模组,工频侧输入电流在各相3个并联桥臂中均分时可得到:

式 中:Va,avg(t)、Vb,avg(t)、Vc,avg(t)分 别 为 工 频 侧a、b、c相3个并联桥臂所有功率模组电容电压总和的瞬时值;R为功率模组直流侧均压电阻值;C为直流侧电容值;db+(t)、db-(t)分别为工频侧b相桥臂功率模组占空比函数的正、负序分量;dc+(t)、dc-(t)分别为工频侧c相桥臂功率模组占空比函数的正、负序分量。
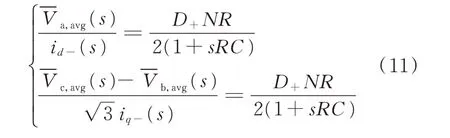
如前文所述,工频正序电流被用于在dq旋转坐标系下控制9个桥臂所有功率模组电容电压的总和,只有负序电流可被用于调节相间电容电压总和的偏差。考虑到开关传递函数中负序分量较小,式(9)可改写为:
根据正序电压和负序电流的功率关系及负序电流的派克变化,可得到式(10)在dq旋转坐标系下的控制关系,如式(11)所示,推导过程见附录B。

利用式(11)在工频侧输入电流中注入特定负序电流即可实现对相间电容电压总和的均衡控制,工频侧负序电流指令如图3所示,其中:Gpv(s)为相间电容电压均衡控制器;Vrefbp为a、b、c相3个并联桥臂所有功率模组电容电压总和的指令值。
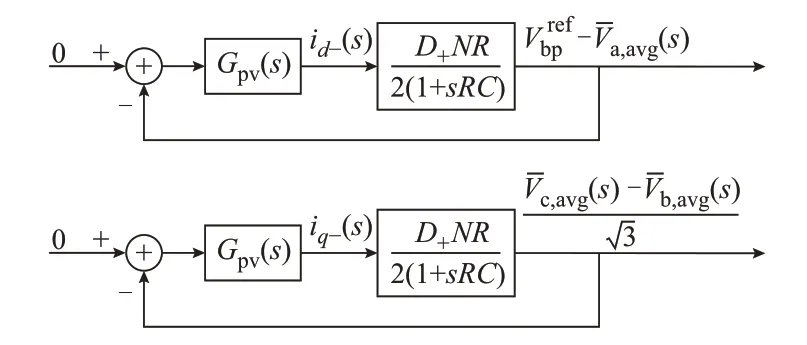
图3 相间电容电压均衡控制Fig.3 Equalization control for phase-to-phase capacitor voltage
2.3 工频侧相内功率平衡控制方法
通过在dq旋转坐标系下实现工频侧的第1、2层功率控制后,可以确保M3C的9个桥臂功率模组电容电压总和及相间功率平衡。如图1所示,由于工频电流ix流入对应相的3个并联桥臂,若流入的工频电流在桥臂间不均衡会造成相内各桥臂功率模组电容电压的偏差,通过在桥臂内的工频环流控制可实现相内功率平衡。由于各相3个并联桥臂的工频环流之和为零,因此在实现相内功率模组电容电压偏差控制的同时,并不会影响工频侧及低频侧的输入电流,也不会影响工频侧的第1、2层功率平衡控制及低频侧的功率送出控制。
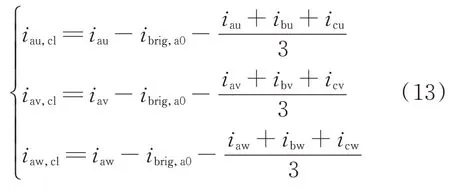
根据图1,a相3个并联桥臂电流中的工频共模电流为:

因此,a相3个并联桥臂电流去除工频共模电流及桥臂低频电流后即可得到桥臂工频环流:
对a相3个并联桥臂功率模组电容电压总和进行闭环控制,即可得到a相桥臂工频环流指令:

式(14)针对a相3个并联桥臂的均衡控制给出了桥臂电流的工频环流指令,b、c相3个并联桥臂的环流指令生成方式类似,不再赘述。
2.4 滤除直流电容电压倍频分量的滑差滤波器
1.2节针对au桥臂给出了其功率波动的分析,对其他桥臂的功率计算过程类似。容易得到工频侧a、b、c相单元瞬时功率为:
由式(15)可见,从列方向看,工频侧a、b、c相单元瞬时功率中仅存在2倍工频频率的波动,而低频侧u、v、w相单元存在的2倍低频频率的波动及双频功率耦合造成的其他频率的功率波动可以被完全抵消。
由式(4)、式(15)可得到稳态条件下,交流系统注入M3C的总瞬时功率为:

由式(15)、式(16)可见,交流系统输入M3C的总瞬时功率没有任何波动,工频侧3个相单元瞬时功率则含有2倍工频频率的功率波动,而由1.2节及式(2)可知,桥臂瞬时功率则同时含有4种频率的波动。由于瞬时功率的倍频波动会引起模组直流电容电压对应的倍频波动,在工频侧实现桥臂功率模组电容电压的分层逐级平衡控制时,应将其中的倍频波动分量滤除,较为简单的方式是使用一阶低通滤波器,但该滤波器需要较低的截止频率且无法完全滤除倍频分量。而滑差滤波器则是一种较为可靠的滤除倍频分量的方法,其实现方法是在桥臂功率模组电容电压采样波形的最大倍频波动周期内将采样值相加,即可使采样波形正、负波动分量抵消,从而实现对直流分量的完全提取。滑差滤波器的表达式为:

式中:T为M3C桥臂功率模组电容电压采样瞬时值u(t)中交流分量的最大倍频波动周期;K为周期T对应的一个控制周期内的采样次数,为保证对倍频分量的抵消效果,通常设置K为偶数。
在基于M3C的柔性低频输电系统中,工频频率fs一 般 为 低 频 频 率fl,s的 整 数 倍。当fl,s=fs/3时,根据式(2)及式(15)可知,在进行相间及相内桥臂电容电压直流分量提取及均衡控制时,可以只针对2倍 工 频 频 率2fs及2倍 低 频 频 率2fl,s设 计 滑 差 滤 波器。因此,根据本文所述控制策略,仅需2个不同频率的滑差滤波器即可实现对工频侧相间和相内功率均衡控制时对功率模组电容电压直流分量的完全提取。而滑差滤波器的引入会对电容电压均衡控制造成一定的延时,因此在设计相应的控制器时,应适当降低其控制带宽,由于功率模组直流电容电压均衡控制带宽远低于桥臂电流控制环的带宽,这样设计是合理的。
3 M3 C综合控制策略
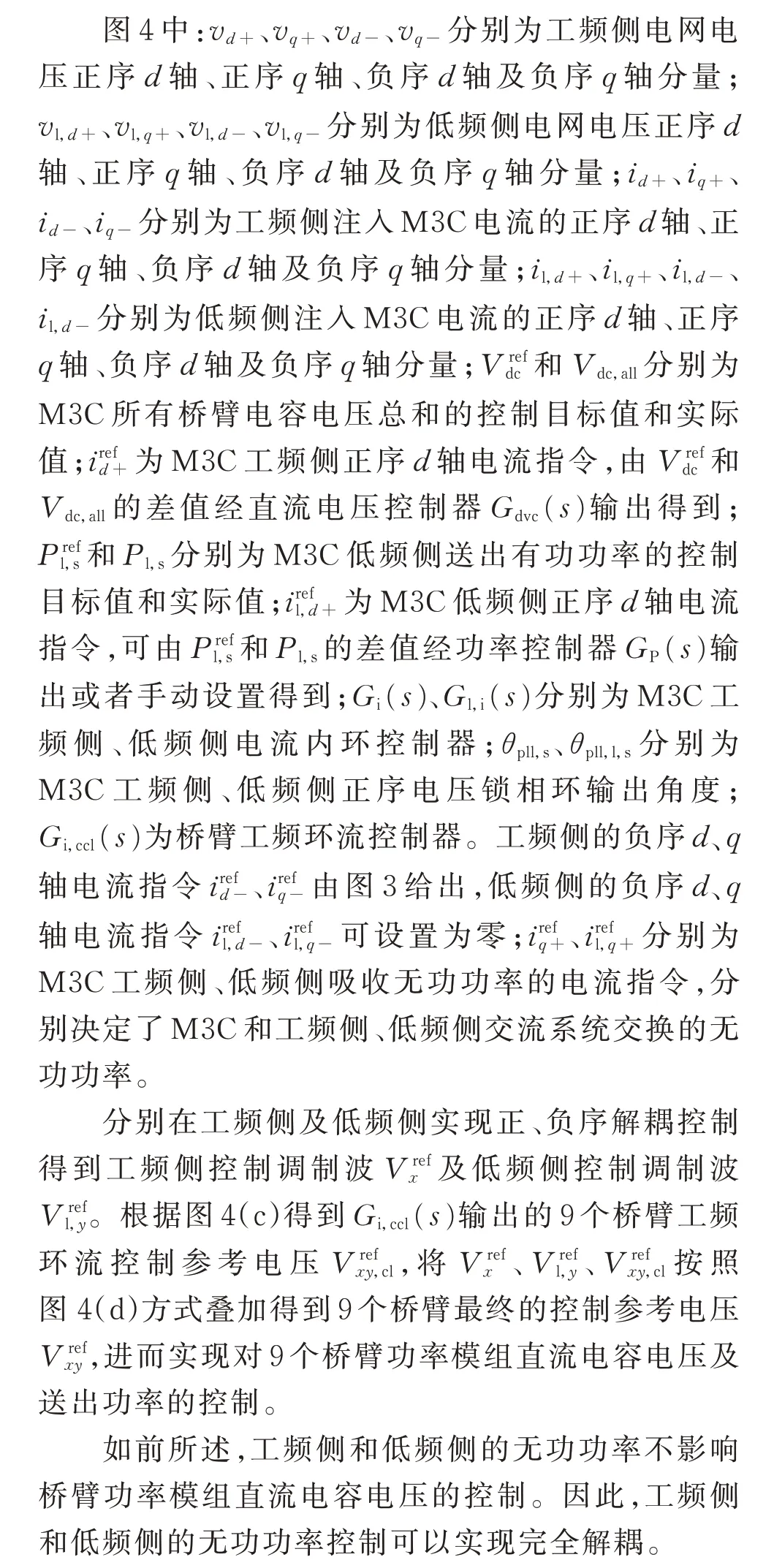
综合第2章所述,图4给出了M3C的综合控制策略。

图4 M3C综合控制策略Fig.4 Integrated control strategy of M3C
4 仿真验证
通过PSCAD/EMTDC仿真系统验证所提控制策略的有效性。搭建基于M3C的双端柔性低频输电系统仿真模型,各M3C工频侧接至35 kV/50 Hz工频电源,由2个独立的110 kV电源通过工频变压器提供。工频变压器高压侧直接接地,低压侧为角形接线。工频变压器低压侧角形接线设计的目的是用于隔离110 kV交流系统故障时传递至M3C换流阀的零序电压。2个M3C的低频侧通过三相交流电缆连接在一起。仿真接线图见附录A图A2,仿真中设置工频侧故障点在F1处,低频侧故障点在F2处,仿真所用M3C参数见附录A表A1。
1号M3C控制模式为定低频交流电压,其作用为建立并维持低频输电系统的频率及电压幅值恒定,2号M3C控制模式为定功率送出。2个M3C功率模组电容电压均控制在900 V。控制2号M3C输出有功功率电流为1.0 p.u.,2个M3C的无功功率指令均设置为零。2号M3C稳态运行及工频侧不对称故障下控制的仿真结果见图5。
图5(a)和(b)分别为稳态下低频侧输入电流和工频侧输入电流。由图可见,基于M3C的双端柔性低频输电系统功率控制稳定,低频侧和工频侧输入电流均具有良好的正弦度。
图5(c)和(d)分别为稳态下M3C的au、bu、cu这3个桥臂的输入电流和桥臂电压。图5(e)为au桥臂电流的频率分量幅值。由图5(c)至(e)可见,桥臂电流中只含有工频和低频分量。结合图5(a)和(b)可知,M3C双频功率耦合引起的多种不同频率的功率波动均体现在桥臂功率模组的电容电压波动中,并不会耦合至M3C的低频侧和工频侧。
为验证所提负序电流注入法对M3C功率模组相间电容电压的均衡控制效果,仿真中在9 s处设置工频侧相间短路故障,持续时间为1 s,分别验证工频侧使能负序电流注入控制和不使能负序电流注入控制对相间电容电压均衡控制的差异。图5(f)为故障下35 kV系统工频线电压波形。
图5(g)和(i)分别为工频侧使能负序电流注入控制时M3C工频侧电流和a、b、c相所含3个桥臂所有功率模组电容电压的均值。由图5(g)和(i)可见,在工频侧注入负序电流后可迅速控制不对称故障条件下a、b、c相间功率模组电容电压均衡。图5(h)和(j)分别为工频侧不使能负序电流注入控制时M3C工频侧电流和a、b、c相所含3个桥臂所有功率模组电容电压的均值。由图5(h)和(j)可见,在工频侧电压处于不对称故障期间,仅维持工频侧输入正序电流无法实现a、b、c相间功率模组电容电压的均衡,且在故障期间a、b、c相间功率模组电容电压将呈现发散不收敛状态,容易触发功率模组电容电压异常保护,影响M3C在故障期间的稳定运行。

图5 基于M3C的低频输电系统仿真波形Fig.5 Simulation waveforms of low-frequency transmission system based on M3C
工频侧对称短路故障、低频侧对称短路故障及不对称短路故障下M3C控制效果仿真结果见附录A图A3至图A5。由这些图可见,在工频侧及低频侧的对称及不对称短路故障下,所提分频分层控制策略均具有良好的动态控制特性。
5 结语
本文基于全桥结构的M3C提出了三相柔性低频输电系统的分频分层控制策略。首先,从M3C双频功率耦合的机理出发,分析其工作原理,在dq旋转坐标系下分别实现工频侧和低频侧在功率控制上的解耦。在保证系统总有功功率平衡的前提下,通过在工频侧注入负序电流实现功率模组电容电压的相间均衡,在静止坐标系下通过桥臂内工频环流控制实现功率模组电容电压的相内均衡。根据对相单元瞬时功率的分析,仅使用2个不同频率的滑差滤波器即可实现各层功率模组电容电压偏差控制的暂稳态特性,所提策略可以确保系统对称及不对称运行工况下M3C均具有良好的暂稳态特性。通过搭建基于M3C的双端柔性低频输电系统仿真模型验证了所提控制策略的有效性和可行性。
所提控制策略在实现交流系统不对称条件下M3C稳定运行的同时,客观上也同时向工频交流系统注入了负序电流,这是所提策略的不足。在工程应用中,仍需进一步探索工频负序电流注入法和桥臂低频环流控制法有效结合的途径,以确保成套低频输电系统在启动、稳态运行及暂态故障穿越等各种工况下,在功率模组电容电压均衡、减小向交流系统注入负序电流及降低桥臂功率器件电流应力等多方面实现综合择优。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
西南交通大学学报(2018年6期)2018-12-18
测控技术(2018年10期)2018-11-25
中国实用神经疾病杂志(2018年9期)2018-05-25
电子制作(2017年8期)2017-06-05
现代工业经济和信息化(2016年22期)2016-08-23
电测与仪表(2016年16期)2016-04-12
电气传动(2015年4期)2015-07-11
电测与仪表(2015年10期)2015-04-09
电源学报(2015年6期)2015-02-18
