
灭火救援实战中的消防机器人技术研究
2021-09-24 13:16张志飞
科技尚品 2021年9期
关键词:研究
张志飞
摘 要:随着现代信息技术的进步,机器人的出现及应用在各领域倍受关注。尤其是在高层建筑与化工类企业数量增加的今天,火灾事故发生率居高不下,增加了消防人员的救援难度。尤其是在一些特殊环境下开展的救援工作,更是让消防人员的生命安全受到了威胁。消防机器人的应用,能在易燃易爆、缺氧、有毒、浓烟等灾害性火灾事故现场取代消防救援人员完成灭火,使消防人员的人身安全得到保障。故而,致力于研究消防机器人技术在灭火救援实战中的应用展开,非常重要。
关键词:灭火救援实战;消防机器人技术;研究
中图分类号:TU998.14 文献标识码:A 文章编号:1674-1064(2021)09-127-02
DOI:10.12310/j.issn.1674-1064.2021.09.062
火灾事故的发生,会引起严重的人员伤亡与经济损失,导致国家财产受到巨大损失,使工厂停产,人员无法正常工作、学习等,并且会干扰社会的和谐稳定。特别是当火灾和爆炸同时出现时,所引起的损失更加惨重[1]。火灾事故大多是在毫无预测的情况下突然发生,加之现今我国在火灾事故报警、检测等技术方面研究不足,以及公众对火灾事故发生征兆、规律认识不到位,导致火灾事故发生后显得手足无措[2],不能正确进行火灾处理与救援,无法清晰讲明自己所处火灾现场的具体情况,使得消防人员到达现场后可能会因为环境、安全等因素限制而无法及时开展救援工作。但消防机器人的应用,刚好为灭火救援工作的开展创设了条件。其能够全面详细地收集、处理、反馈火灾现场状况,为消防人员制定救援方案提供依据,确保救援效率得到提升,控制损失与伤亡。故而,有必要针对消防机器人技术在灭火救援实战中的应用进行研究。
1 消防机器人在火灾应急救援中的功能分析
消防机器人的使用,可在开展一些危险复杂环境下的灭火工作时,作为特殊装备使用,起到成功救火的作用,具体功能如下:
1.1 移动功能
消防机器人移动载体的越野能力与自适应能力都非常强,在参与救火过程中可自主作出准确判断且完成障碍翻越[3],做好现场情况的合理分析,从而高效率完成一定角度的楼梯攀爬等相对复杂的功能。
1.2 探测功能
消防机器人能够结合灾害事故现场的具体状况,在不同电子元器件的使用下完成探测。其中,装载摄像头能将现场信息以通信网络形式快速传送至后防系统处理,这对各类传感器(包括内部传感器与外部传感器)提出了更高的要求[4]。其中,内部传感器是消防机器人在火灾事故现场对自身状态参数进行探测,并将其传输至中央大脑DSP完成科学的路径规划,依照灾害事故现场做出合理应对,确保消防机器人正常推进救援工作;而外部传感器则是对灾害事故现场的各类数据(如火场温度、障碍物状况、有毒气体浓度、可燃气体种类及氧气含量等)给予探测,便于后防处理系统及时获取原始数据。
1.3 控制处理通信功能
因DSP在数字信息处理上相比单片机所占的优势更显著,故而消防机器人将DSP用作信息处理的重要部件,其中的控制处理通信组成包括两部分,简单概述为:
第一,消防机器人内部处理系统。经不同传感器对火灾发生现场的具体数据给予探测,经DSP处理分析原始数据。
第二,通信网络。在公安、应急管理、消防等多级组网作用下完成数据传输,并且对技术成熟度进行考虑,需选择2.5代GPRS或2.75代EDGE网络,也可选择3G网络开展远程无线数据通信,确保双工或多工通信实现。
1.4 防腐蚀、防爆功能
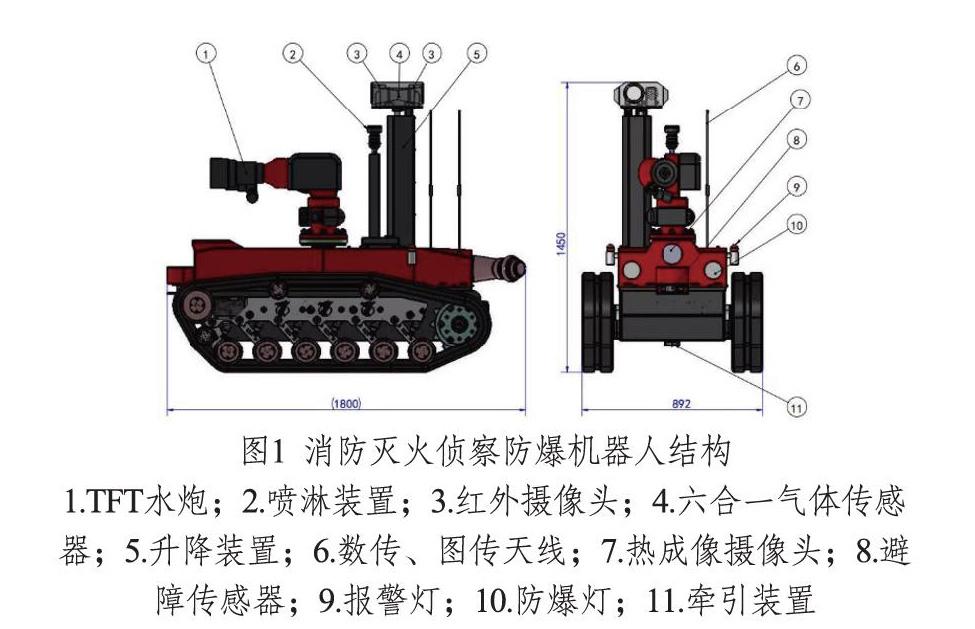
由于消防机器人取代消防员在危險复杂的火灾现场执行任务,故而在设计时就不得不对机械材料、电子元器件等组成器材的耐粉尘、腐蚀、浓烟与高温能力展开综合考量,做好关键部位的防爆与防腐蚀处理,使其能够在不良环境下仍旧可处于正常工作状态,从而高质量执行各项任务。较典型的为消防灭火侦察防爆机器人[5],经可搭载消防水炮、履带式底盘、温湿度变送器、摄像机、有毒有害气体探测器等上装,对于有毒、易燃、浓烟、易爆等火灾现场,则可取代消防救援者由防爆机器人执行灭火、探测、救援等任务,使得火灾现场数据资料采集不到位、消防人员人身安全得不到保障等不足得到弥补,达到减少人员伤亡的目的。
消防灭火侦察防爆机器人的整机结构:整机经48V防爆锂电池与电源管理系统进行电流供给,具体如图1所示。
1.TFT水炮;2.喷淋装置;3.红外摄像头;4.六合一气体传感器;5.升降装置;6.数传、图传天线;7.热成像摄像头;8.避障传感器;9.报警灯;10.防爆灯;11.牵引装置
1.5 消防功能
其同样属于消防机器人的重要功能之一,主要是通过做好前期准备并将相关数据信息传送给现场指挥员,此后再根据具体数据信息结合实际救援经验作出准确判定,并经遥控发出指令,指挥消防机器人的抢救救援工作。
2 消防灭火机器人技术的典型实战场景
2.1 火灾救援
消防机器人的平衡作业臂属于3节1米结构,能够顺着转轴开展90°俯仰运动,电机驱动钢索进行拉伸与收缩,并从1米延伸到3米。为得到火灾现场的图像信号[6],作业臂前端云台应进行彩色CCD摄像机安装,视频信号经无线传输形式于地面控制台显示屏监控火灾现场情况,从而对机器人的任务执行给予合理调整,并根据现场需求安装温度传感器,对火灾现场温度给予探测,还可经可燃气体传感器对火灾可燃气体含量进行探测,预防轰燃。故而,消防机器人在灭火救援实战中,用于在失火建筑不明确内部情况的条件下独自或辅助侦查人员到达火场。在机器人各类传感器的作用下,监测火场面积、温度与燃烧物质种类等。在浓烟状态下,还可借助机器上的热成像设备进行被困者方位查询,同时可为现场搜救者提供救助设备,使得灭火救援战斗力大大提高。
2.2 危险化学品事故处理
若化工厂、核电厂等特殊行业出现火灾事故,可能会有易爆、有毒危险化学品泄漏。若缺乏对应的防护与支援,在实战过程中就算训练有素的专业救援队伍,同样无法轻易开展工作。将防护用具戴上后,又使得搜救人员对环境的感知能力下降,这就导致实战救援难度大大提高,可能会在救援时危及消防员的生命安全。消防机器人在执行任务时,对复杂防护装备的要求不高,能够携带不同的专业设备到达危险化学品泄漏现场,对重度泄漏部位进行评估,明确泄漏点且将周围环境情况及时传送给相关人员,保障火灾中的泄漏问题得到更好的处理。
2.3 破拆作业
在经济发展速度不断加快的背景下,高层建筑数量日渐增加,火灾事故发生率也不断提高。在火灾救援时,常会遇到需要破拆高强度玻璃锁构造障碍的情况。通常情况下,救援人员通过建筑物顶部绳索悬挂于空中,选择太平斧将玻璃砸开,不过人员在建筑物外悬挂作业不能站稳,作用力较小,需要花费的破拆作业时间长。
机械人作业臂前端所安装的旋转飞锥破拆装置,在微电机作用下将飞锤带动起来展开快速旋转,在与玻璃接触的一瞬进行能量释放,达到破拆的目的。要确保机器人稳定定位悬挂在需破拆处,作业臂前端进行弹射吸附装置安装。破拆作业执行期间,弹射吸附装置会有强力吸盘长杆被射出,将玻璃面吸住,保持长杆回缩,使机器人与玻璃面紧贴。而处于旋转状态的飞锤,在长杆收回过程中通过限位传感器的作用,使破拆装置启动,从而击碎玻璃。有资料显示,消防机器人能够完全破拆不超过16 mm的玻璃。
2.4 密闭空间救援
地下建筑与密闭空间火灾事故发生后,燃烧所形成的大量烟气因无法在短时间内快速排出,会引起烟气聚集,受到持续高温影响使火场环境变得复杂恶劣。消防人员进入现场直接参与救灾,会引起伤亡事故,而消防机器人的使用则能够解决该问题。典型的消防排烟机器人被广泛应用于隧道消防救援中,消防人员在进入隧道前,以遥控对排烟机器人的行进路径、排烟机角度进行控制,取代消防人员抵达火场执行任务,完成火场的高效排烟,扩散隧道空间中的烟雾,提升火场能见度,使被困人员可快速逃生。同时,当消防排烟机器人将烟气排出、能见度提升后,消防人员则可快速找出着火点,提升灭火效率,便于物资疏散。排烟机器人能以喷雾形式降低火场温度,控制火情蔓延速度,使火灾引起的经济损失降到最低。
3 结语
因各类新工艺、新技术及新产品的出现,消防灭火机器人在火场一线消防官兵的生命安全保护及提高灭火效率中发揮了重要作用。各地消防官兵需对这一新装备有更全面深入的了解,结合这一新产品提出更多与实战接近的新理论与信息技术,使其能够在灭火救援实战工作中展现自身价值。如今,机器人产业已被纳入到国家发展战略,消防灭火机器人作为机器人领域的一员,备受关注与重视,更多的资本、技术也被引进该行业。消防灭火机器人市场逐渐被打开,会使更多人认识该产品,在后续研究中有必要根据我国火灾的发生特征,结合消防部门现状,在消防科研技术力量帮助下,使消防灭火机器人产品尽早成为消防队伍中的一员,真正被推广普及到特殊火灾环境救援中,实现救助任务的高效率执行。
参考文献
[1] 李俊.刍议灭火救援实战中的消防机器人技术[J].低碳世界,2019(1):273-274.
[2] 彭会广.灭火救援实战中消防机器人的应用技术进行分析与研究[J].魅力中国,2018(43):257.
[3] 党海昌.消防机器人在我国灭火救援中的应用现状和前景分析[J].消防技术与产品信息,2016(3):69-71.
[4] 谭光辉.消防机器人装备在灭火救援中的有效运用[J].科技创新与应用,2016(27):300.
[5] 宁再望.消防机器人技术在灭火救援中的设计分析[J].数字技术与应用,2012(5):135,137.
[6] 刘海.化工区起火时消防机器人在灭火救援时发挥的作用[J].化学工程与装备,2017(5):243-244.
猜你喜欢
客联(2021年5期)2021-09-10
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
证券市场红周刊(2018年17期)2018-05-14
文理导航(2017年26期)2017-09-08
军事文摘·科学少年(2017年4期)2017-06-20
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
地震研究(2017年1期)2017-04-10
地震研究(2017年1期)2017-04-10
