
基于三维设计软件Inventor的趾板结构体型参数化设计
2021-09-24 12:02:52李云龙敖雪菲
水利规划与设计 2021年10期
谢 刚,李云龙,敖雪菲
(中国电建集团北京勘测设计研究院有限公司,北京 100024)
混凝土面板堆石坝因其具有造价低、工期短等特点,得到蓬勃的发展,逐渐成为当今水利水电工程建设的主流坝型之一。在混凝土面板堆石坝建设的过程中,坝体变形控制、渗流稳定控制、面板防裂技术等工作直接影响着工程建设的质量和安全,防渗设计作为其中不可或缺的重要内容,一直是混凝土面板堆石坝设计的重点和关键。
趾板结构作为面板坝防渗系统重要组成部分,与面板结构通过周边缝连接共同形成坝基以上的防渗体,同时与帷幕灌浆处理后的基岩连成整体,封闭地面以下的渗漏通道,起着承上启下的作用,为混凝土面板堆石坝防渗系统设计的重点和难点。趾板结构空间结构相对复杂,在设计过程中需结合大坝上游坝坡、地形地质条件、作用水头等对趾板轴线和体型进行不断调整优化,过程繁琐且易出错,给工程设计者带来一定的困扰。
目前,趾板结构设计多采用传统二维设计手段,利用AUTOCAD软件进行平面设计,对于趾板空间定位、趾板转角设计等问题处理难度大。一些工程师提出一种基于CATIA的趾板三维的设计方法,用于提高面板坝设计效率。
Autodesk lnventor是美国Autodesk公司推出的一款可悦化三维实体建模软件,它是一款全面的设计工具,它的功能涵盖了产品的革图设计、零件设计、零件装配、分析计算、视图表达、模具设训、工程图设计等全过程。利用三维设计软件lnventor的参数化功能可实现三维建模,参数化建模技术用"顺序方法"对约束求解,达到全数据相关、全尺寸约束、用尺寸驱动设计结果的修改的目的。
综上分析,本文在总结混凝土面板堆石坝趾板结构传统设计特点的基础上,运用三维设计软件lnventor参数化功能,研究将趾板结构设计参数化,建立趾板结构三维模型,解决了趾板结构设计中参数过多、不便于准确定位及转角过渡不平顺等技术难点,提高了趾板结构设计的准确性和效率,对混凝土面板坝趾板结构设计具有很大的工程运用意义。
1 趾板结构体型参数化设计的难点与假定
1.1 趾板结构体型参数化设计技术难点
(1)工程适用性。地形地质条件决定了趾板结构体型的空间布置,趾板三维结构模型应适应各种工程需要,真正实现参数化的三维设计。
(2)参数化的简易性。准确地选取较少的参数控制趾板结构体型,快速实现三维建模。
(3)趾板转角处理。相邻两段趾板的转角段会出现不同的结构形式,如错台、扭面等情况,设计过程中各工程的处理方式往往不统一,而趾板结构体型参数化须采取统一的处理方式处理趾板转角部位。
1.2 趾板结构体型参数化的相关假定
1.2.1平趾板假定
一般岸坡趾板结构有4种结构型式,根据趾板与面板结构、开挖面的空间关系不同而有所区别,为方便钻孔、灌浆及机械化施工,面板坝趾板结构多采用平趾板型式,即趾板结构横截面底面线为水平线,本文进行趾板结构体型参数化设计采用平趾板的假定,如图1所示。工程设计师可结合地质条件、作用水头、自身稳定、灌浆要求等方面要求,确定趾板结构的断面尺寸及上下游面坡度,参考工程经验,初步确定趾板结构断面尺寸。

图1 平趾板典型剖面图
1.2.2趾板转角处理
通过工程经验总结,趾板结构转角一般可分为内凹型转角和外凸形转角。
(1)内凹型转角
内凹型转角在Inventor里放样后会产生相交的情况,如图2所示,对此类转角工程上一般有如下处理方式:
1)处理方式1:先让两段趾板自然相交,再将多余外沿剪除,形成三角过渡区,其底部开挖成平面(斜面),顶面为扭面。由于相临趾板剖面尺寸、空间走向的不同,Inventor软件很难通过一系列的“修剪”操作使两段趾板无缝衔接。
2)处理方式2:控制点一侧为标准体型,另一侧为异形体。这种处理方式Inventor软件较好实现,施工也较为方便。
3)处理方式3:转角处用一块异形体实现过渡。但这种方法会导致控制点落到结构体外的情况,不利于施工测点立模。
4)处理方式4:不单独设置转角,转角处由施工单位按控制点坐标将两段趾板平顺过渡即可。这种处理方式虽能满足现场施工,但转角处结构体型不明确,不利于参数化建模。
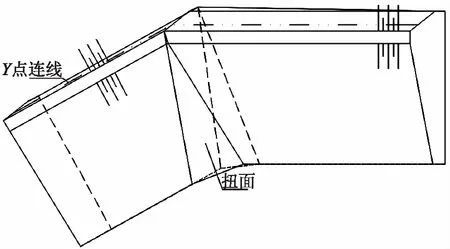
图2 内凹型转角
(2)外突型转角
如图3所示,外突型转角在Inventor里放样后会形成三角空缺区域,工程上该部位处理方式有:
1)处理方式1:三角区域过渡。大多工程将三角区域单独设计成异形结构,三角区域两侧为标准结构。但在Inventor用这种方式处理转角仍会在轴线转折点处产生错台,无法实现趾板结构体型的参数化。
2)处理方式2:转角两侧设置扭面过渡,会导致控制点落到结构体外的情况,不利于施工测点立模。

图3 外突型转角
综合分析,控制点一侧为标准体型,另一侧为异形体的方法能较好地处理两种类型的转角,具有以下优点:①在Inventor软件里容易操作;②工程施工较为方便;③结构配筋相对简单。
用此方式对趾板转角处做统一处理,具体如下:在转角段控制点两端各用“从平面偏移”方式创建截断平面,然后用“实体分割”命令将两段趾板各截去一部分,然后在趾板截断的位置用“投影几何图元”方式创建草图,最后将两端投影草图和控制点处趾板横截面分别放样生成过渡段。
2 趾板结构体型参数化的关键
实现趾板结构体型参数化设计,需要选择合适的趾板定线方式、合理的局部坐标系,选取较少的参数控制趾板结构体型,将趾板结构断面尺寸参数化。
2.1 选择趾板定线方式
早期面板坝工程实践中一般以面板底面与趾板基础交线,即“X”线(如图1所示)作为趾板体型设计和开挖的控制线。但当趾板走向与坝轴线大角度相交或者垂直,“X”线会偏离到趾板断面以外或根本不存在,不利于实际施工放线以及趾板结构体型的参数化控制。
由于坝轴线和趾板线确定后,“Y”线(即面板底面与趾板下游侧斜面交点,如图1所示)就是唯一的,且与基础开挖无关。趾板立模浇注采用“Y”线作为控制线,施工方便、精度高。因此,本文以“Y”点连线作为趾板体型参数化设计的控制线。
2.2 建立局部坐标系
采用工程坐标,趾板控制点坐标数值很大,输入起来不方便,不利于参数化控制,因此本文选择以坝轴线为基准建立局部坐标系,具体如下:以坝轴线右端点为原点,以坝轴线为“x轴,以指向左岸方向为x轴正方向;以垂直于坝轴线方向为“y”轴,以指向大坝上游方向为“y”轴正方向;以铅直方向为z轴方向,以垂直向下方向为z轴正方向,以防浪墙底部高程作为z轴的零点高程。
2.3 确定趾板结构特征参数

其中①~④为趾板结构体型控制性参数,由地形地质条件和受力条件决定;⑤~⑦由趾板所在空间位置决定,可通过计算得出。
2.3.1求解LEY
趾板横剖面LEY可通过下式求出:
LEY=t=a+bZ
(1)
式中,t—面板厚度;a—面板起始厚度,一般在0.3~0.4;b—面板厚度系数,对于等厚面板,b=0,对于变厚度面板一般在0.002 ~ 0.0035;Z—计算断面至面板顶部的高度,按2.2节方式建立局部坐标系时,即为该点的z坐标。


过Y2点作一条垂直于Y2Y3的直线Y2P2,其长度为L2,与Y轴的夹角为θ2,已知Y2坐标为(x2,y2,z2),Y3坐标为(x3,y3,z3),则:
m1′=L2/z2L2=(y2-dis)/cosθ2θ2=arctan [(y3-y2)/(x3-x2)]
(2)
dis:大坝横剖面上面板内侧顶点到坝轴线的距离,如图5所示。



(3)
式中,d0—A、B两点的水平距离,如图5所示;h0—A、B两点的垂直距离,如图5所示。

图求解示意图
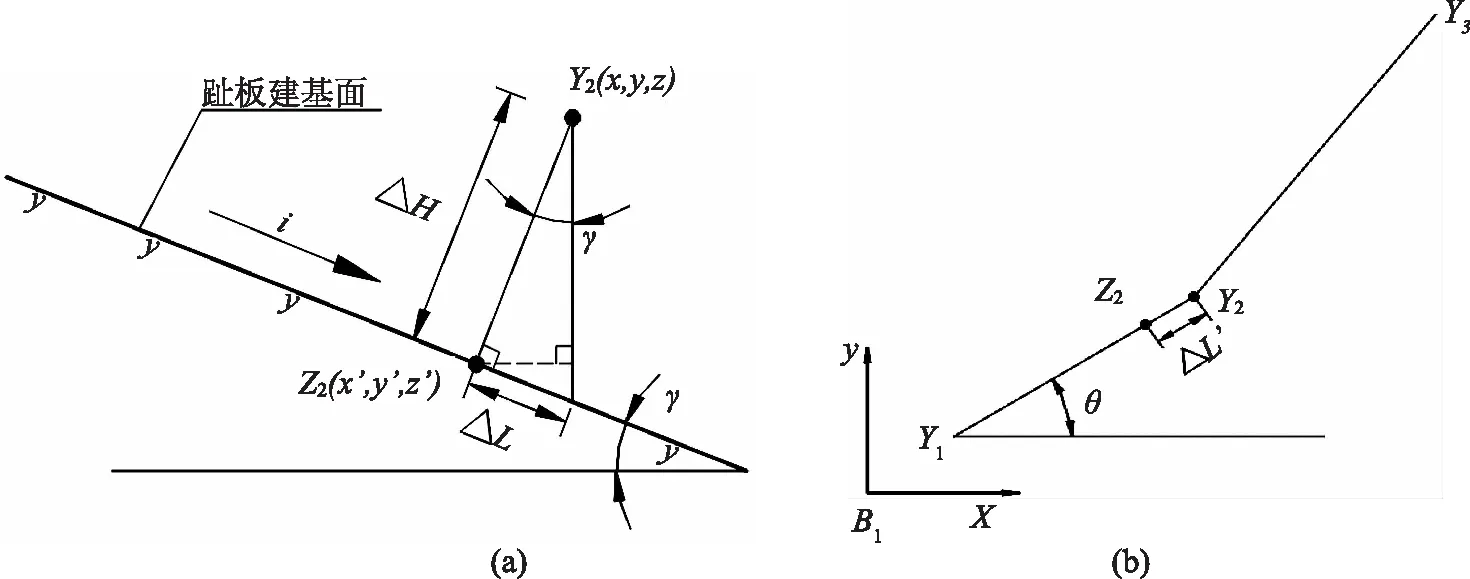
图5 Y点和Z点空间位置关系示意图

2.4 趾板控制点坐标点之间的关系
2.4.1趾板控制点坐标之间的关系
由于趾板各控制点(Y点连线)位于面板下表面坡度为1∶m的平面内,因此在局部坐标系下各控制点z坐标和y坐标满足下式:
z=(y-dis)/m
(3.9)
2.4.2趾板横剖面上Y点和Z点坐标之间的关系
在趾板开挖过程中,为了方便施工放线,往往以Z点作为趾板开挖控制点,Z点为Y点在趾板建基面上的投影(如图1所示)。对于岸坡段趾板,由于趾板横剖面与铅直面有一夹角γ,该横剖面上Z点与Y点的x、y坐标并不重合(如图5所示),局部坐标系下Z点和Y点坐标差通过下式换算:
Δz=ΔHcosγ5
ΔL=ΔHtanγ(3.11)
ΔL′=ΔLcosγ=ΔHsinγ
Δx=ΔL′cosθ(3.13)
Δy=ΔL′sinθ(3.14)
式中,ΔL′—ΔL线段在水平面上投影长度;θ—局部坐标系下ΔL′线段与x轴夹角。
2.4.3局部坐标和整体坐标之间的关系
整体坐标与局部坐标可通过如下方式进行转换。设A点为局部坐标系原点,其在整体坐标为A(x0,y0,z0),局部坐标为A(0,0,0)。假定局部坐标轴x′与整体坐标轴x、y、z的空间夹角分别为α1、β1、γ1;y′与x、y、z的空间夹角分别为α2、β2、γ2;z′与x、y、z的空间夹角分别为α3、β3、γ3。任一点B的局部坐标为x′、y′、z′。则B点整体坐标按下式计算:
3 工程实例运用
以清原抽水蓄能电站上水库混凝土面板堆石坝为例,利用Inventor三维建模软件进行趾板结构参数化设计。为保证平趾板结构具有普遍适用性,设计时考虑了面板厚度变化、趾板厚度变化、趾板宽度变化等情况,基本能适应各种混凝土面板堆石坝。
3.1 创建趾板结构轴线
先创建趾板轴线(Y点连线)在xy平面的投影,对每个控制点施加x、y向尺寸约束,然后在每个控制点处创建铅直面,施加z向尺寸约束。将铅直线的底端点顺次相连,得到趾板空间轴线。
3.2 创建趾板结构横剖面
在每一段趾板轴线首尾两端建立与该轴线垂直且经过端点的工作平面,在各个工作平面上创建趾板典型横剖面,对每个剖面添加约束。
3.3 生成趾板结构模型
3.3.1趾板转角处理
在每一段趾板轴线首尾两端剖面通过Inventor“放样”命令生成实体,趾板在转角处会产生不连续现象(错台、交叉、空缺等)。考虑Inventor软件的可操作性和工程的可实施性,采用增设异形趾板来解决上述问题,外突型转角处理如图6所示。具体实施方式:①将趾板在转折点高高程一侧趾板沿轴线截断1~5m,该距离视趾板宽度或布置形式而定;②将转角两侧趾板横截面“放样”生成异形趾板。
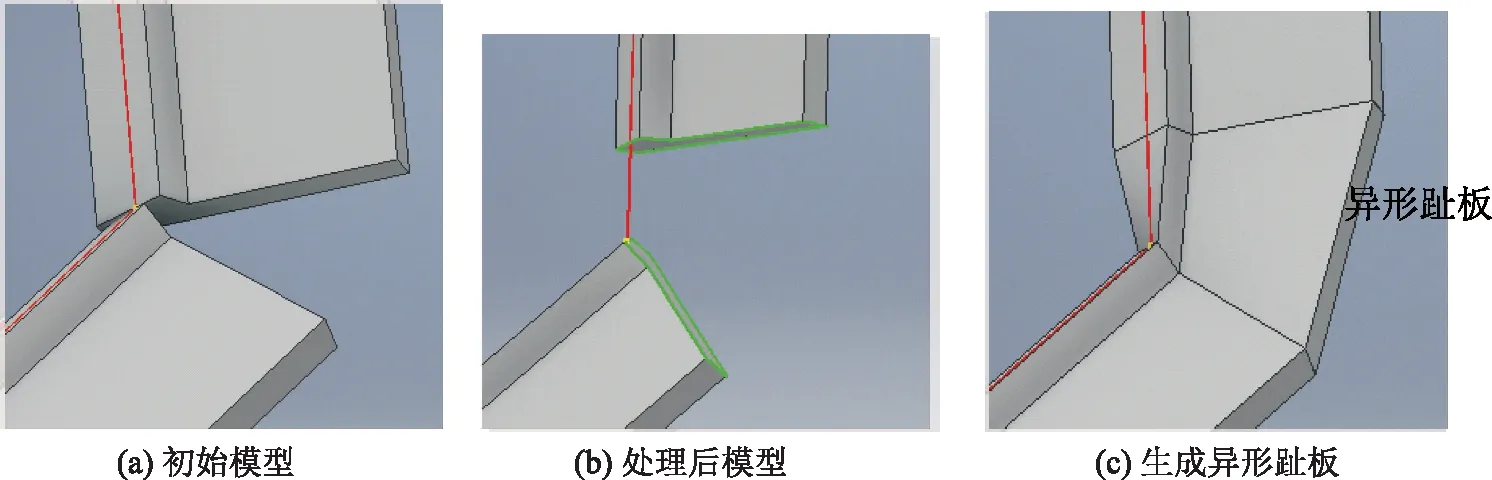
图6 趾板结构外突型转角处理
3.3.2趾板宽度处理
为了减少控制性参数,趾板宽度可先按最大宽度设计,后续根据再地质条件和作用水头在特定处将趾板截断,对宽度进行调整。
3.3.3生成模型
经过上述处理,生成趾板结构三维模型,如图7所示。

图7 趾板结构模型
3.4 创建参数化驱动
通过Inventor三维结构模型参数与Excel表格参数相链接的方式创建参数化驱动,当Excel表格参数发生改变时,Inventor三维结构模型也随之发生改变。Excel表格中的参数如下。
(1)控制参数。确定趾板体型结构所需的全部参数。包括趾板控制点坐标,坝顶防浪墙参数、面板参数、趾板剖面尺寸参数(LBC、HCY、LGA、LBA),转角处理参数(控制点两端趾板截去的长度)等,如图8所示。

图8 控制性参数
(2)计算参数。由控制性参数通过计算得到的参数。包括各趾板控制点横剖面LEY、∠BCY(反映趾板上游面坡度)、∠YEF(反映趾板下游面坡度)。
4 总结与展望
本文基于三维设计软件Inventor,提出了混凝土面板坝平趾板结构的参数化设计方法,解决了趾板结构设计中参数过多、不便于准确定位及转角过渡不平顺等技术难点,实现了趾板结构体型的三维参数化设计。此外,由于Inventor三维设计软件与水工三维配筋软件具有兼容性,趾板模型的建立可快速、便捷地实现三维配筋,使趾板结构设计的准确性得以保证,效率得到提高,具有很强的工程运用意义。
猜你喜欢
车主之友(2022年5期)2022-11-23 07:23:28
北京航空航天大学学报(2021年9期)2021-11-02 08:24:28
中国生殖健康(2020年5期)2021-01-18 03:00:02
幽默大师(2019年10期)2019-10-17 02:09:12
文苑(2019年14期)2019-08-09 02:14:30
水力发电(2018年6期)2018-09-18 07:46:28
水利规划与设计(2018年2期)2018-03-19 06:00:14
山西水利(2016年6期)2017-01-20 09:25:30
振动工程学报(2014年2期)2014-03-01 01:15:23
振动、测试与诊断(2014年1期)2014-03-01 01:13:57
