富营养化水体浮游植物遥感监测研究进展*
2021-09-24 02:39张玉超景园媛刘兆敏
湖泊科学 2021年5期
来 莱,张玉超,景园媛,刘兆敏
(1:中国科学院南京地理与湖泊研究所湖泊与环境国家重点实验室,南京 210008) (2:中国科学院大学,北京 100049)
近年来,在自然因素与人为因素的共同作用下,湖泊水环境变化剧烈,水质持续恶化,生态系统遭受严重破坏,功能和效益不断下降,富营养化及引起的藻类水华频发问题逐渐成为公众媒体关注的焦点[1].
浮游植物是生活在河流、湖泊和海洋中的敏感有机体,其群落结构一定程度上可以反映水体富营养化的程度[2]. 通常浮游植物就是指浮游藻类,包括蓝藻门、绿藻门、硅藻门等8个门类的浮游种类. 足够的藻类生物量和适宜的环境条件是形成蓝藻水华的基本条件. 藻类大量繁殖引起的水华现象(简称“藻华”)是湖泊水体富营养化的重要特征[3]. 针对全球71个大型湖泊的遥感监测研究表明,68%的湖泊藻华发生强度增加趋势显著[4]. 2019年,我国监测了107个重点湖(库)的富营养化状况,其中6个呈中度富营养状态、24个呈轻度富营养状态、其余未呈现富营养化[5]. 而以太湖、巢湖、滇池为首的富营养化湖泊,蓝藻水华暴发尤为频繁[6-8]. 我国已经成为世界上蓝藻水华暴发最严重、分布最广的国家之一[9].
卫星遥感因其速度快、范围广、监测周期性短,已经成为湖泊富营养化及蓝藻水华监测和预测预警不可或缺的技术手段[10]. 藻华暴发时,覆盖有藻类的水体反射光谱在红光波段呈现出低反射率、绿光波段及近红外波段呈现高反射率,明显区分于清洁水体,是遥感技术识别藻华的关键依据. 因此,基于遥感手段监测浮游植物的相关主题越来越多,监测范围也由小尺度向大尺度转变. 目前,我国长江中下游少数富营养化湖泊(太湖、巢湖)已基本实现对其蓝藻水华面积及水体表层叶绿素a浓度的业务化卫星遥感监测[11],为政府及水环境管理部门提供了重要的决策依据[12].
此前有关“富营养化水体浮游植物遥感监测”主题的综述大多侧重于藻华面积的识别、表层色素浓度反演算法的总结上;研究区域大多集中于长江中下游的太湖、巢湖、鄱阳湖以及云南的滇池、洱海等[13-14]. 近年来,相关研究在研究内容和方法上又有了全新的发展. 本研究基于中国知网(CNKI)和Web of Science等文献数据库,以富营养化水体和蓝藻水华为主题,综合1970-2020年间约803篇国内外研究成果,基本厘清和总结了在近些年来主要的研究进展和重点,并归纳总结了发展中所面临的困难以及未来发展的新趋势. 本综述皆在梳理富营养化水体浮游植物遥感监测的发展动向,促进水色遥感的进一步发展和深入应用,同时也为从事蓝藻水华生态灾害监测和预警人员提供重要的技术支撑和理论参考.
1 研究主题与数据源
研究表明该领域逐渐发展为以应用为导向,研究主题趋于更多样化:从藻华水体识别、藻华面积监测、表层色素浓度反演发展至水下三维藻总量估算以及不同藻种定量区分等. 其中,藻类总存量的研究还处于起步阶段,这将为未来三维立体化监测浮游藻类浓度奠定基础. 研究方法也从传统的线性或非线性回归分析算法,发展为更复杂的人工智能(artificial intelligence,AI)方法,如支持向量机和人工神经网络等,且以“遥感+AI+大数据+Google Earth Engine云计算平台”为主题的新技术也逐渐成为新热点[13]. 研究数据源从单一数据源转至多数据源融合使用,利用的卫星数据也更加丰富多彩(图1a,b). 围绕该主题的相关论文主要发表于《湖泊科学》、《环境科学》、RemoteSensing、RemoteSensingofEnvironment、ScienceoftheTotalEnvironment等国内外期刊上.
多层面需求推动了多源卫星数据的多元化应用. 近年来中高分辨率遥感卫星的发展为多尺度的湖泊水质变化监测提供了多种数据源,促进了湖泊水体动态监测向业务化信息服务方向不断推进[15-16]. 但由于卫星载荷以及应用目标的需要,现有常用卫星传感器的时、空分辨率设置并不能完全满足内陆水体监测的时间连续性、空间完整性的要求[17]. 因此,除加强多源遥感数据联合监测外,研制更高时间分辨率、高空间分辨率传感器及星座组网,是未来研制水色遥感卫星的发展和应用方向(图2).
为了形成完善的富营养化湖库蓝藻监控体系,形成全方位、多层次的天-空-地一体化观测和应急防控平台,要充分发挥多源观测手段在不同时空信息观测方面的优势,整合不同手段信息,在空间尺度、时间尺度等方面取长补短、互相补充[17-18]. 在小型湖库应急监测中,选择无人机(分辨率最高能达到0.04 m)或人工监测,实现人工安排、随机机动,短时间内开展突发性湖库藻类大规模暴发的事故处置,已有学者应用无人机在太湖[19]、八里河[20]、Maspalomas自然保护区[21]等进行藻华监测;而在日常大中型湖库监测中,则更倾向于使用多源卫星数据实现长时序动态监测,如中分辨率成像光谱仪(moderate-resolution imaging spectrum-radiometer, MODIS)因其免费、时间分辨率高等优点成为日常水质监测中最受欢迎的数据资源.
2 水体表层藻华的遥感识别方法研究
浮游植物大量聚集会引起水体色度、透明度等物理性质的变化,进而导致水体反射波谱特征的变化[22]. 覆盖蓝藻的水体反射光谱因叶绿素a和藻蓝蛋白的吸收效应,在可见光的蓝紫光及红光波段呈现较低反射率,在近红外则出现类似于植被的“陡坡效应”,这是湖泊藻华遥感识别的理论基础[23]. 基于近红外抬升的单波段法以及近红外与可见光波段差异的差值法、比值法、归一化植被指数(normalized difference vegetation index,NDVI)法、增强型植被指数(enchanted vegetation index,EVI)法、浮游藻类指数(floating algae index,FAI)法等均为目前开展湖泊藻华遥感识别的主要方法[24-28]. 此外,还有一些针对浮游植物色素的蓝藻水华指数(cyanobacteria bloom algae index,CAI)、最大特征峰高度(maximum characteristic peakheight,MPH)、最大叶绿素指数(maximum chlorophyll index,MCI)等方法(表1).
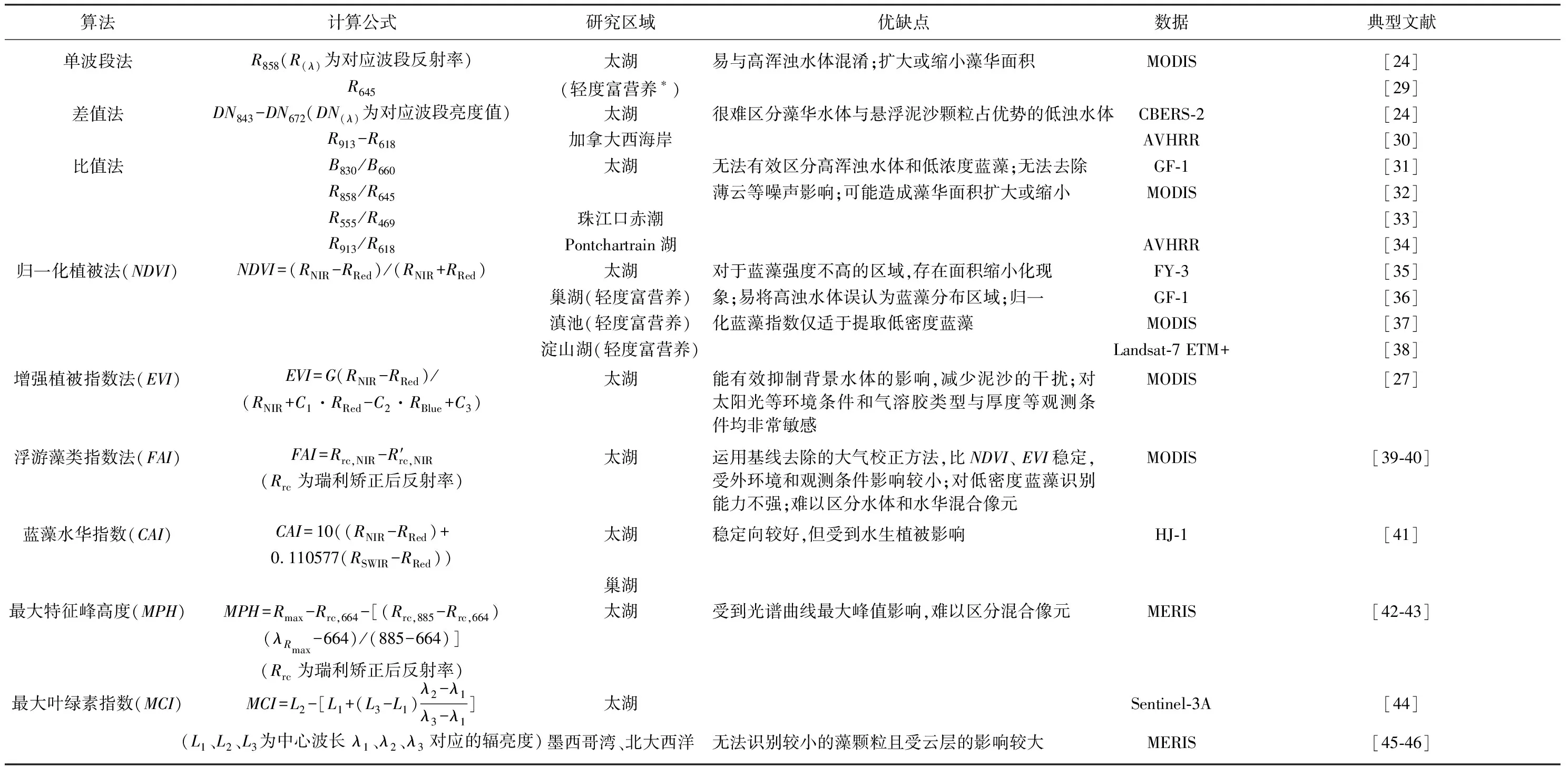
表1 藻华水体识别算法*
在业务化应用中发现,水生植物、高浑浊水体以及薄云等对藻华遥感识别的影响显著[47-48]. 藻华具有近红外抬升的反射光谱特点,与植物的相类似,因此,基于该特点的藻华遥感识别方法均无法对两者进行区分. 基于先验知识,对于常年生长有水生植物的地区,通常用掩膜将其遮盖掉;对于水生植物分布变化较为显著的内陆水体,通过对比两者在可见光波段及短波红外波段的反射光谱差异,实现水生植物和藻华的同步遥感监测[49-50]. 朱庆等[51]利用叶绿素a光谱指数和藻蓝蛋白基线的水华和水草识别模型,提取太湖水华和水草分布图,表明高光谱遥感则可以利用625 nm附近藻蓝素吸收峰区分蓝藻水华和水草. 高浑浊水体在可见光-近红外整体增高,导致单波段法、比值法、NDVI、FAI等会将浑浊水体误判为低强度藻华[33,52-53],而适当的波段组合成的假彩色合成图上,藻华可明显区分于清洁水体、高浊水体及云等,水色指数(forel-ule index,FUI)为此问题提供了一个新的解决思路[54].
MODIS因其良好的时间分辨率(Auqa与Terra两星联合为2次/d),成为大型富营养化湖泊藻华日常遥感监测的主要数据源. 然而250 m的空间分辨率会导致影像中存在藻华水体的混合像元[55-56],在尚无更高分辨率的免费卫星数据用于日常遥感监测的前提下,开展亚像元藻华遥感监测研究是满足高精度藻华遥感日常监测的重要前提[57]. Zhang等[6-8]利用瑞利校正反射率(rayleighcorrected reflectance,Rrc)和从Rrc导出3个光谱带中的浮藻指数研发了藻华像元生长算法(algae pixel-growing algorithm),将藻华面积识别精确到了亚像元内,将MODIS与(准)同步TM遥感监测结果一致性提升至85%以上,且该方法在太湖、巢湖以及滇池得到了广泛的研究与应用. 此外,马金戈[58]基于Google Earth Engine(GEE)对全球大型湖泊(>500 km2)的蓝藻水华进行了提取研究,得到了全球大型湖泊的藻华时空暴发情况. 结合GEE平台开展大尺度藻华遥感监测也成为水色遥感的一个新趋势.
3 水体表层浮游植物色素浓度遥感反演研究
藻华水体识别定性地反映了浮游植物的空间分布,但不能定量评价水体中浮游植物的确切浓度. 浮游植物色素(叶绿素a和藻蓝素等)是水体光学活性物质,是定量表征水体富营养化程度以及浮游植物浓度的重要水质指标[59-60]. 目前,遥感反演浮游植物色素主要是基于实测多/高光谱数据的经验算法、半经验半分析算法[12]. 基本反演思路如图3所示. 其中,实用性和应用性比较强的模型为精度较高且有理论支撑的半经验/半分析算法,完全分析算法的机理及参数仍需进一步探究和优化[61-62].
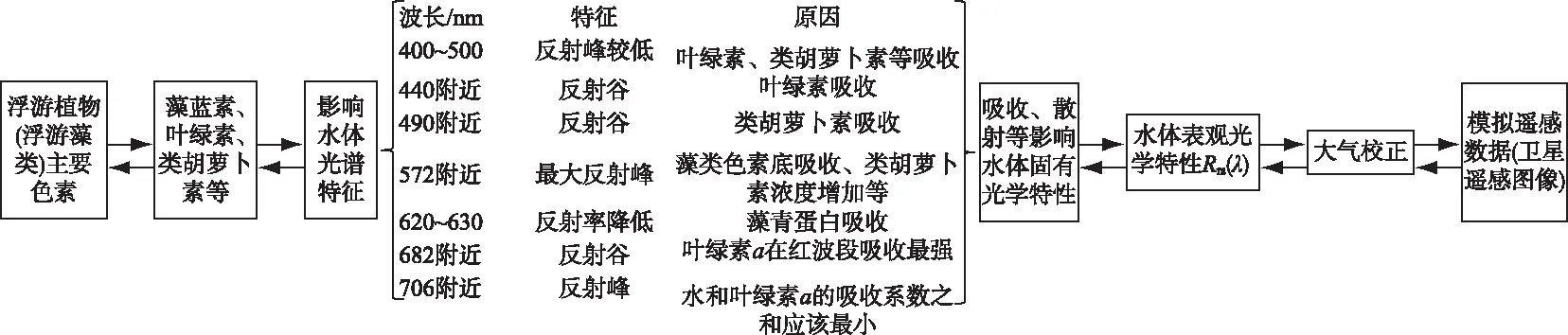
图3 遥感反演藻类色素流程Fig.3 Remote sensing inversion process of algae pigments
表2和表3列出了内陆湖泊叶绿素a及藻蓝素的遥感反演具体算法,并对这些算法做了多角度的对比分析和归纳总结. 对比表格可以发现相同的数据有不同的算法,相同的区域有不同的数据,但这些方法均是基于具体卫星遥感数据和湖泊的光学特性所构建的针对性较强的浮游植物色素反演模型. 内陆湖泊光学活性差异较大,甚至同一湖泊不同时间段水体光学活性物质组成及其比例也大为不同[96],往往造成反演算法复杂程度及反演精度上的差异. 因此,此类算法通常都具有显著的区域性和季节性,适用性较差. 多源卫星中,针对海洋水色设置的中分辨率成像光谱仪(missouri emergency resource information system,MERIS)、哨兵3(Sentinel-3 OLCI)等,因具有对叶绿素和藻蓝素的特征峰波段设置,反演结果精度高、效果好[97-98]. 而Landsat等宽波段卫星是长时序日常遥感监测内陆湖泊的常用数据,其波段设置和信噪比性往往难以满足高精度定量遥感监测的要求[83,99]. 近年来,机器学习方法,包括深度神经网络[100]、卷积神经网络[19]、随机森林[20]等,都已被用于水体藻类色素浓度的反演. Cao等就基于XGBoost(BST)模型,研发了陆地资源卫星数据(Landsat OLI)反演内陆湖泊浮游植物色素浓度的实用方法,该模型相比其他机器学习有更高的准确率、效率和并发. 结果也表明机器学习模型可以为进一步提高宽波段数据反演水体藻类色素浓度的适用性和准确性提供重要的参考和应用前提[101]. 此外,大气校正对水色参数定量反演也有很大的影响,当前的多种大气校正方法都未充分考虑水色遥感的特点,适用性与普适性较差. 宋挺等[102]就对高分四号卫星的大气校正算法进行了改进,结果显示红光波段校正精度最高,可以较好地应用于内陆浑浊二类水体的定量遥感监测.
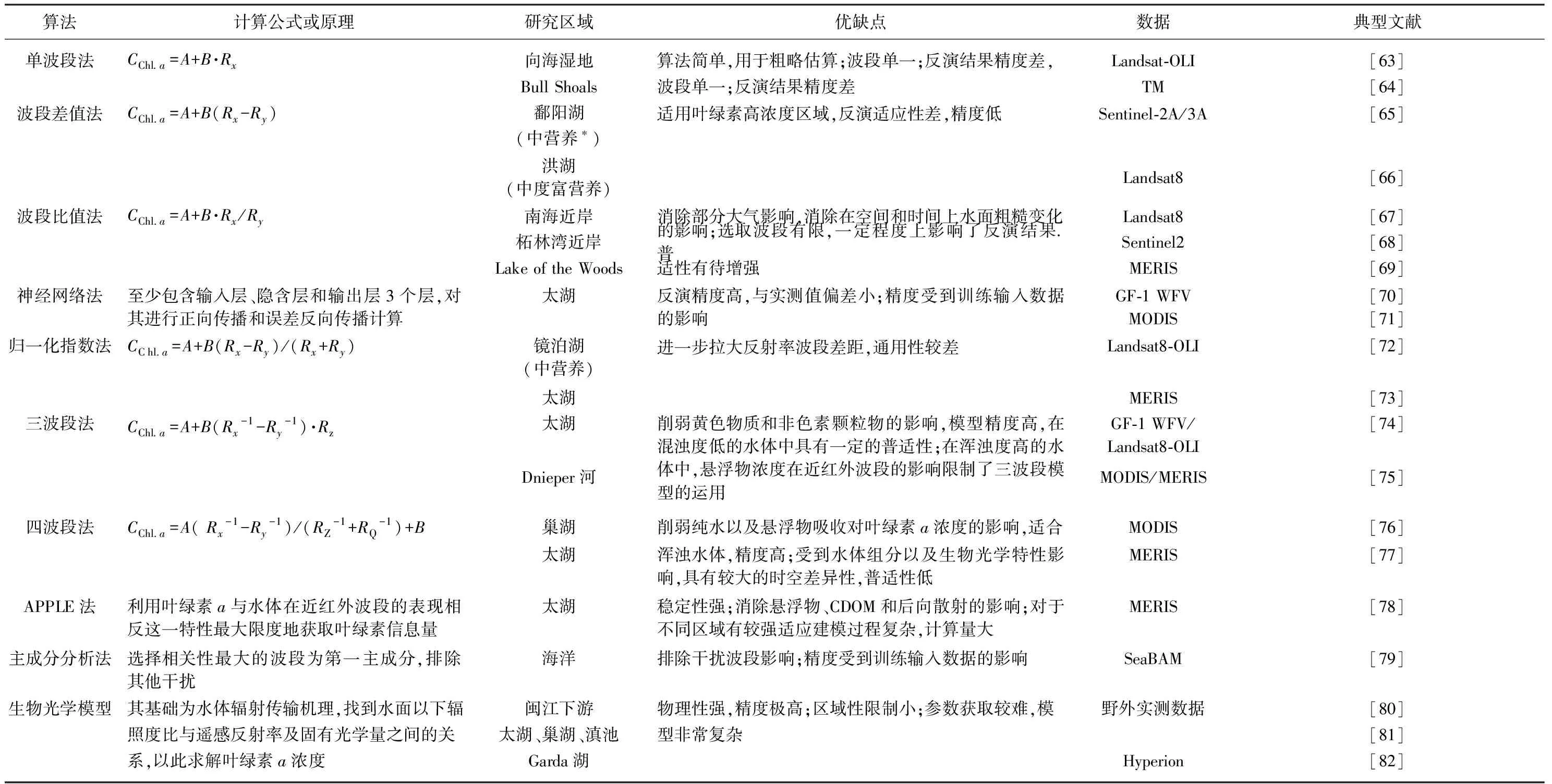
表2 叶绿素a遥感反演模型
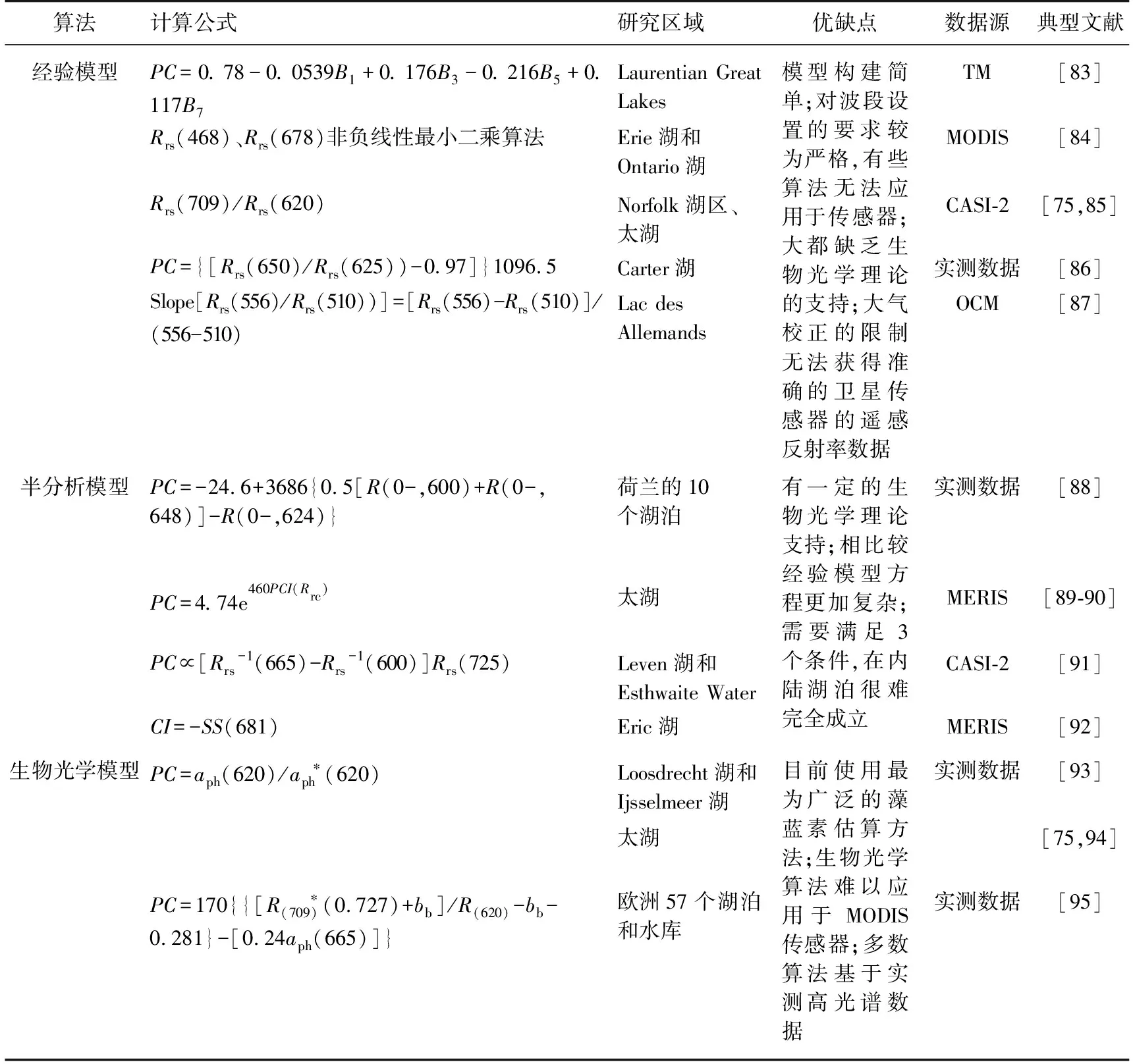
表3 藻蓝素遥感反演模型
4 水体藻类总存量的遥感估算研究
现有水体表层叶绿素a浓度的遥感反演研究,是基于藻类垂向均一传统水色遥感的理论假设. 但已有研究表明藻类在垂向上是非均匀分布的,会对基于传统假设而形成的水体光学特性、水下光场分布、水质参数反演产生很大误差[103]. 只有充分考虑藻类垂向分布异质,精准获取真光层内藻类总生物量(即藻总量),才能准确把握蓝藻水华强度变化情势及湖泊营养状态变化趋势. 传统的藻总量及其空间分布的估算方法是基于几个生物量分布样本的离散测量,然后插值到整个湖泊;随着遥感技术的发展,水体表层色素浓度的遥感反演被广泛地应用到湖泊蓝藻水华预测预警中[104];近几年,考虑到利用水体表层藻量信息的局限性,部分学者开展了富营养化湖泊藻总量遥感估算方面的初步研究[105-106].
理想条件下,假定像元水柱内藻类水平均匀分布,通过水体表层的遥感反射率,准确获知水体中藻类垂向分布函数及其结构参数,结合水位及湖盆DEM数据,完成每个像元水柱内藻总量积分计算,基于所有像元水柱的藻总量计算结果,完成全湖的藻总量估算. 然而,目前受水体其他光学活性物质以及野外监测数据准确性的影响,直接基于遥感反射率精确获取藻类垂向分布函数的结构参数难度很大,存在着较多的“相同藻类垂向分布反射率光谱相异”或“相同反射率光谱而藻类垂向分布相异”的情况.
现有的研究主要基于以下思路“由浅入深”地开展水体藻总量遥感估算研究:①在水平剖面面积为单位面积、垂向水深为Dm的单位水柱中,假定整个水柱中藻类呈现水平、垂向都是均匀分布. Xue等[107-109]研究巢湖藻类垂向分布对水体遥感反射比的影响已表明,基于藻类垂向分布均匀的假定会造成遥感估算藻总量的显著高估;②假设藻类垂向分布为高斯类型,利用表面叶绿素信息和总生物量之间的经验关系计算藻类总生物量. 该方法被用于遥感估算海洋系统的初级生产力,适用于大多数海洋水域[110]. Li等[106]借鉴该思路,基于MODIS遥感数据建立算法开展了我国巢湖非藻华条件下(即均一型、高斯型)藻总量遥感估算研究,但也表明这种估算方法存在卫星空间分辨率差异及卫星和野外测量之间时间间隔的不足;③基于野外实测及Ecolight模拟数据,统计分析水体表层到40 cm深度处的藻类生物量与单元水柱内的藻类总存量的线性关系,实现了藻华条件下(即指数型、幂函数型)的藻总量估算研究. Li等[106]基于这种方法对浅层富营养化湖泊的藻总量进行估算,表明该方法不仅对表层藻类生物估算精度要求较高,而且其线性关系随着藻类垂向分布函数结构参数差异而不同,普适性较差.
由此可见,现有的富营养化湖泊藻总量遥感估算方法,均基于水体表层藻类生物量估算. 鉴于优势藻种差异、藻类垂向分布的复杂性以及变化的快速性,表层生物量与水柱内藻总量的关系差异性较大,提出一个普适性较强的定量关系难度较大.
5 不同藻类种群的遥感定量监测研究
不同湖泊中蓝藻水华的优势种群有着较大差异,甚至同一湖泊在不同的季节或者不同的地区也都存在不同的水华蓝藻优势种群[111],即存在“一湖多种”的现象. 相关研究表明,形成蓝藻水华的种类主要是微囊藻(Microcystis)、束丝藻(Aphanizomenon)、鱼腥藻(Dolichospermum)和颤藻(Oscillatoria)[104]. Aldrich等对传统藻种识别做出了相关研究,主要有基于形态学的显微计数法和图像法[112]、基于藻种DNA 的分子生物学方法[113]以及基于色素光学特征的高效液相色谱法[114-115]等. 而针对湖泊蓝藻种群结构的定量遥感反演的研究目前鲜有文献报道. 马万泉[116]、戴红亮等[117-118]、吕恒等[119]和王瑜[120]基于室内控制试验及模拟试验,开展了不同门类藻体生物光学特性研究,包括蓝藻门(铜绿微囊藻(Microcystisaeruginosa))、绿藻门(小球藻(Chlorellavulgaris))、硅藻门(梅尼小环藻(Cyclotellameneghiniana))以及隐藻门(卵形隐藻(Cryptomonasovata)),并探索性地建立了藻种间比例遥感估算方法[121],结果表明二层球形模型误差较小,有较好的优越性,但也存在波谱曲线抖动的不足.
此外,针对内陆富营养化湖泊典型水华蓝藻,张壹萱等[111]以微囊藻、鱼腥藻、束丝藻3种典型水华蓝藻为研究对象,通过室内光学控制实验对其固有光学特性进行研究,并探讨色素浓度、色素占比以及藻类等效粒径对不同水华蓝藻固有光学特性的影响. 上述3种典型蓝藻的细胞形状、粒径大小以及形成蓝藻群落的聚集形态存在明显差异,这为基于生物光学特性开展水华蓝藻种群结构的定量反演研究提供了理论上的可行性[119-123]. 但室内培养的藻类基本为单细胞,与湖泊环境中藻颗粒形态及其生物光学特征存在显著差异,因此,基于人工培养藻类的光学特性构建的反演算法,其实际应用能力和反演精度受到一定的限制. 而Chu等[124]利用MODIS卫星数据对准分析算法(quasi-analytical algorithm)进行了改进与优化,在获取巢湖水体表层吸收特性的基础上,初步开展了巢湖不同水华蓝藻类群的遥感定量识别研究,结果表明相比人工培养藻类的光学特性构建的反演算法,卫星遥感模型有更好的准确性和适用性. 这也为下一步加强构建遥感定量反演模型、精确解析湖泊水体中主要水华蓝藻的种群结构,为富营养化湖泊蓝藻生态灾害的预测预警提供准确时空分布信息等奠定了基础.
6 结束语
本文基于大量文献的检索和筛选,从研究主题、研究数据源、研究内容、研究方法等方面对内陆富营养化水体浮游植物的遥感监测进展进行了深入分析,并围绕藻华遥感监测、浮游植物色素遥感反演以及最新的湖泊藻总量和不同水华蓝藻的遥感定量识别方面的研究,开展了具有针对性的分析与讨论. 该综述可为湖泊水环境管理和决策的相关研究人员提供参考.
目前,内陆富营养化水体浮游植物的监测仍面临着诸多问题,如遥感反演模型的普适性、多源卫星数据监测结果的可比性和一致性等. 因此,为了促进富营养化湖泊浮游植物的遥感应用能力,亟待补充完善不同湖泊、不同优势藻种的光谱数据库,为发展普适性更强的反演算法奠定数据基础. 此外,由于不同湖泊面积和水环境的差异以及不同数据源之间分辨率的差异,需要进一步发展多源数据融合的反演算法,以此实现系统化、体系化的监测. 利用多卫星、多通道、多模式的方法,构建一个“空-天-地一体化”的水环境监测平台,从而实现全覆盖、多角度、多手段的实时监测,这将进一步促进内陆富营养化水体浮游植物的遥感监测更智能、更高效、更准确.
猜你喜欢
当代水产(2021年8期)2021-11-04
环境科学导刊(2021年2期)2021-01-09
皮革制作与环保科技(2020年14期)2020-03-17
当代水产(2019年8期)2019-10-12
当代水产(2019年9期)2019-10-08
湖北农业科学(2016年20期)2017-02-15
科技视界(2016年13期)2016-06-13
科技传播(2016年7期)2016-04-28
科学24小时(2015年3期)2015-09-10
幼儿智力世界(2015年5期)2015-08-20