
小型四旋翼无人机在小面积测绘工程中的运用优势分析
2021-09-24 10:16:46翟佳辉
科技创新与应用 2021年26期
黄 斌,翟佳辉
(西安煤航遥感信息有限公司,陕西 西安710199)
在无人机技术发展初期的测绘工程[1]项目中,主要依靠固定翼无人机搭载不同类型的载荷来完成相关的工作。尽管固定翼无人机可以按照规划的航线执行任务,但对操作人员的专业操作水平、数量要求很高。随着无人机飞控技术不断取得新的突破,使得具有结构简单、操作简易、性能稳定优势的多旋翼无人机,越来越小型化、智能化,单人单机即可作业,需要多人协作的固定翼无人机不再是唯一选择。在小面积测绘工程项目中,合理地使用小型四旋翼无人机,不仅能高效地完成工作任务,而且可以保证成果数据的质量可靠。
1 测绘工程项目中常见的无人机类型
测绘工程项目中常见的无人机类型,主要分为固定翼无人机和旋翼无人机。随着电池技术的持续发展,聚合物锂电池逐步向高密度、小体积、大容量方向进步。搭载聚合物锂电池的电动无人机不仅在续航里程上不断突破,且运行稳定,携带方便,逐渐取代了以燃油发动机为动力的油动无人机。常见的固定翼无人机以起飞方式不同又分为手抛式固定翼无人机、弹射式固定翼无人机、垂直起降式固定翼无人机三种类型。固定翼无人机在测绘工程的运用中,具有作业面积大、抗风能力强、续航里程长等优势,可以灵活搭载多种任务载荷,以满足不同测绘工程任务的需要;其劣势在于,对作业人员的数量、作业人员的配合熟练程度、飞行场地、测区天气状况有一定要求,且需要作业人员对无人机的操控必须熟练掌握。旋翼无人机的优势在于起降方式简单,对作业人员的数量、飞行场地、测区天气的要求较固定翼无人机相比,所受的约束较小;劣势在于较固定翼无人机作业面积小、续航里程短。总而言之,不管是固定翼无人机,还是旋翼无人机,在搭载小型数码相机进行低空航空数字摄影的情况下,其拍摄的影像有清晰度高、分辨率高、实时性好、自主性强的特点,具有快速、实时、精度高等优点,可以真实、准确地反映地面纹理信息和具体的地形地貌。
2 小型四旋翼无人机在小面积测绘工程中的优势
无人机在测绘工程中,主要应用于低空航空数字摄影测量方面,与卫星遥感影像相比,低空航空数字摄影测量具有方便灵活、成本低、精度高、数据时效性强等诸多优势。在常见的测绘工程中,存在众多面积较小,地形较为复杂,或其他因素导致的不适合固定翼无人机作业的区域,在这种条件受限的情况下,使用小型四旋翼无人机,可以有效规避不利因素,利用旋翼机的自身优势,在作业成本可控的情况下,以较小的成本、较高的效率完成飞行作业。
在笔者参与的大量测绘工程项目中,经过不断总结发现,使用小型四旋翼无人机(大疆精灵4RTK)具有如下几个方面的优势。
2.1 飞控设计优秀
无人机的飞控系统是无人机的中枢神经,无人机在飞行过程中,必须依靠飞控系统发出的指令,及时调整无人机各项飞行参数,以获得稳定的飞行姿态。各种飞行传感器(如空速计、GPS、陀螺仪、磁罗盘等)先将实时采集的数据发送给无人机的飞控系统,飞控系统再依靠自身算法,对传感器采集的数据进行计算,并通过内部链路发送给电调、电机,使无人机在最优的动力电源输出条件下,获得最适合的飞行动力及最理想的续航状态。与此同时,无人机飞控系统通过通讯链路将各类实时飞行参数发送至遥控器地面站,使无人机操作人员可以在第一时间及时掌握无人机的飞行状态。
2.2 智能化程度高
绝大多数无人机地面站系统,均需要部署在具有Windows操作系统的便携式计算机上。从计算机体积及重量方面考虑,携带较为不便。同时,地面站系统因其他客观因素(如采用开源飞控),存在稳定性不佳、操作繁琐、且地面站与无人机遥控器分离的问题,导致在飞行作业过程中,经常需要专门安排人员负责地面站系统的操作与监测。
小型四旋翼无人机(大疆精灵4RTK)的地面站系统,集成于无人机配备的遥控器中,运行流畅,简单易用,具有非常好的人机交互界面,支持KML文件导入,便于规划航线;支持多种航线设置,可以根据不同的作业类型使用预置的航线规划选项;具有避障功能,可有效减少碰撞风险;动力电源具有智能管理系统,可根据实际飞行情况,预估续航里程,电量不足时自动返航,降低因电量不足导致失控坠毁的风险。
2.3 使用方便
小型四旋翼无人机(大疆精灵4RTK)集成度极高,搭载1英寸CMOS,有效像素2000万(总像素2048万),有效画幅5472×3648。在到达预先规划的起飞点后,只需要安装螺旋桨和电池,即可完成无人机的组装,非常便捷;内置RTK模块,可通过设置网络RTK,大幅提高航片POS点坐标的精度,做到厘米级定位。
2.4 不受部分不利天气因素影响
在笔者参与的部分小面积的大比例尺[2]测绘工程项目中,曾频繁遭遇有雾的不利气象因素。如下文举例说明的某风电场1:2000比例尺地形图测绘项目,为减小雾气对飞行作业造成的影响,经实地测试,需降高至270m高度飞行。如采用搭载索尼A7R相机的固定翼无人机作业,飞行高度由716m降至270m,单架次作业面积由约10km2降至约5km2,不仅作业效率大大降低(固定翼无人机较小型四旋翼无人机在设备安装、调试、航线规划、飞行转场方面有明显的劣势,尤其表现在时间成本上),而且增加了固定翼无人机的飞行风险;采用小型四旋翼无人机作业,尽管同样需要降高飞行,但后者降高后的单架次飞行效率,较固定翼无人机而言损失极小,仅由约0.8km2降至约0.7km2,但依靠稳定的飞行状态,只要合理规划作业区域,采用恰当的作业方式,完全可以利用小型四旋翼无人机操作方便的优势,通过分割区块、高频次飞行的策略来弥补单架次作业面积较小的缺憾,同样可以在较短的时间周期内完成固定翼无人机1-2个架次即可完成的飞行工作。
3 两种提高小型四旋翼无人机在小面积测绘工程中工作效率的方法
在测绘工程中选用哪种类型的无人机作业,笔者认为,要从测区面积、测区地形、测区气候、工程精度要求、作业人员配置等方面综合考虑,不可仅以工期长短作为主要考量指标。下面以笔者参与的某风电场1:2000地形图测绘工程项目为例,介绍在此项目中选择小型四旋翼作为作业机型的原因,并将两种提高工作效率的方法进行介绍。
某风电场1:2000地形图测绘项目,工作区面积共计约20km2,地形为山区地貌,常年风力较大,平均风力4-5级。本项目主要任务是获取工作区数字化地形图(DLGDigital Line Graphic)、正射影像图(DOM-Digital Orthophoto Map),为某风电公司风电项目建设提供基础地形地貌数据。项目成果采用CGCS2000坐标系高斯克吕格投影,高程采用1985国家高程基准。按照业主方要求,为满足后期地形图精度需要,需要布设相控点若干。
由于并行项目多,人员紧张,本项目可实际参与外业飞行及相控点布设的作业人员仅有2人。加之测区地形为山区地貌,通过对测区往期卫星影像图进行分析发现,测区因高差较大,可供固定翼无人机选择的起降场地并不理想,且路网单一。经过项目组对测区面积、可调配参与本项目外业飞行人员、相控点布设实施人员、工作区地形、测区气候条件等因素的综合考量,最终决定采用小型四旋翼无人机(大疆精灵4RTK)进行数据采集作业,在外业相控的基础上,采用GPS辅助空三测量技术,利用PIX4D软件进行空三加密,在此基础上生成密集的DSM(数字表面模型)点,通过处理DSM点获取数字高程模型(DEM)数据。然后利用DEM对影像进行正射纠正及镶嵌,生成数字正射影像(DOM)。最后导入空三加密成果,通过采用航天远景和cass10.0软件,绘制等高线,采集地物信息,进行矢量数据的编辑和整饰,最终形成数字线划图(DLG)成果。
在本项目中,采用小型四旋翼无人机(大疆精灵4RTK)作业,不仅可以避免人员抽调对其他项目造成的影响,而且可以规避因高差较大、飞行场地不佳对固定翼无人机造成的起降及飞行风险。另外,采用小型四旋翼无人机(大疆精灵4RTK)作业,还可以根据测区不同区域的高差情况,及时调整飞行高度,减少固定翼无人机需要在高海拔地点进行起降作业,而导致作业过程中出现的同区域因高差过大但飞行高度不可变而造成的精度偏差问题。
3.1 分区规划作业法
首先根据测区范围,严格按照业主方规定的每两个相控点之间不超过2km的要求,规划相控点位置。在满足业主要求及数据精度的前提下,为提高工作效率,相控点尽量选择在车辆可达的道路及房屋附近,且避开植被茂密及水域区域,再将测区由整体分割为9个面积大小接近,且单个区域面积不大于2.5km2的小区域(如图1所示)。小型四旋翼无人机航高设置按照1:1000比例尺进行设置,高度300m,理论地面采样距离(GSD)为8.22cm,完全满足1:2000比例尺成图需要。

图1
按照小型四旋翼无人机(大疆精灵4RTK)航高300m、旁向重叠度65%、航向重叠度75%的设置,单架次平均作业面积约为0.8km2,作业时间约25min。完成一块约2.5km2的作业面,大约需要3-4架次,约100min。采用分区规划作业法,作业人员将以分割区域为单位,分别布设各个分割区域所规划的相控点,并在布设完成后,优先对当前分割区域进行无人机飞行作业。待某一块分割区域相控点布设及飞行作业全部完成后,再进行下一块分割区域的相控点布设及无人机飞行作业。
这种作业方法,一方面可以保证在人员投入较少的前提下保证项目顺利推进,另一方面减少了作业人员在人手不足、路网单一情况下布设相控点的时间成本。同时,此作业方法在工作区气候条件不理想时,可以减少天气原因对相控点布设及无人机飞行带来的不利影响。只要当日作业区块顺利完成,即便是降雨降雪损坏了本区域内的相控点标志,也不会影响整个工作区的作业进度。
3.2 一控多机作业法
本项目采用的小型四旋翼无人机(大疆精灵4RTK),具有一控多机的作业模式,即一台遥控器,控制两架及以上小型四旋翼无人机,最多不超过五架。具体操作方法,首选将分割好的9个分块区域的KML文件,导入遥控器中,选择“大区分割”的规划模式,再将分块测区继续分割成面积相等的两个或多个区域。分割完成后,点击“参数设置”选项,将航高设置为300m,旁向重叠率设置为65%,航向重叠率设置为75%,勾选“高程优化”选项,选择“定距拍照”模式。到达预先规划的起飞场地后,在规划任务里导入设置好的分割航线,将两架无人机分别分配于区块1和区块2,点击“上传航线”,再点击“执行”按钮,即可依次起飞或同时起飞开始飞行作业。采用单架小型四旋翼无人机对面积约2.5km2的面积进行飞行作业,需要约4架次100min,采用一控多机的作业方法,同样的作业面积,虽然飞行架次数不变,但由于两架无人机同时作业,作业时间显著减少。综合风力及分块区域的不规则形状因素,平均每块分割区块的作业时间可减少30%以上。
在本项目中,两人作业小组综合以上两种作业方法,在平均风力4级、早晨有雾的情况下,单日至少可以完成2块分块区域的相控点布设及无人机飞行作业。与此同时,为了保证每块分割区块相邻区域的重叠率,项目小组采用小型四旋翼无人机航线规划中的“自动边距”设置功能,用时四天,完成了本项目所有区块的相控点布设及无人机飞行作业,实际飞行面积达26km2,共布设相控点13个。无人机航摄成像时间为上午10:00至下午16:00,共进行了39个架次的飞行,有效架次36次,共计拍摄航片2668张。考虑到测区高差较大因素,采用小型四旋翼无人机作业,在整体作业周期上,基本与采用固定翼无人机作业效率一致,且更加灵活,简单方便。通过后期对航飞数据进行数字空三加密可以看出,本项目空三加密的各项精度[3]均满足规范及设计书的要求,可为本项目下道工序使用(空三精度报告如表1所示)。
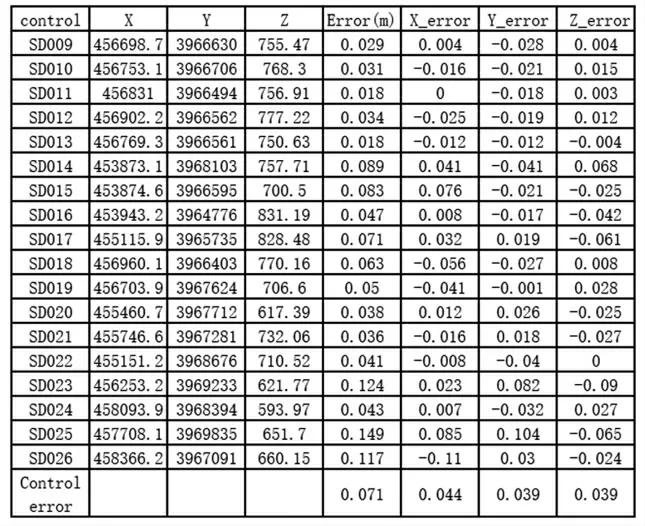
表1
4 结束语
无人机在工程测绘中的运用十分广泛,对于不同的测绘工程项目,从无人机类型选择到使用方法,必然有很多选择。如何合理规划、规避风险、降本增效,用合适的设备完成既定任务,将无人机最新的技术合理地运用到实际的测绘工程生产中去,是一个需要我们持续关注、总结的问题。本文仅以小型四旋翼无人机在小面积测绘工程中的运用及两种提高工作效率的方法作为探讨,希望给相关工作者一些参考。
猜你喜欢
北京测绘(2023年1期)2023-02-23 13:25:10
汽车观察(2022年12期)2023-01-17 02:19:38
山东煤炭科技(2022年6期)2022-07-14 03:10:40
北京航空航天大学学报(2021年4期)2021-11-24 01:13:00
计算机应用文摘·触控(2021年20期)2021-11-11 01:43:05
计算机应用文摘(2021年20期)2021-05-30 18:27:46
河北地质(2021年4期)2021-03-08 01:59:14
中国铁道科学(2019年5期)2019-10-19 07:55:14
电子制作(2019年7期)2019-04-25 13:18:24
测绘通报(2018年10期)2018-11-02 10:07:28
