
基于多基地IR-UWB生物雷达系统的多人体目标识别定位方法研究
2021-09-24 03:38:42白思源王昭昳许兆坤薛慧君
医疗卫生装备 2021年9期
白思源,王昭昳,许兆坤,薛慧君,吕 昊,安 强,张 杨
(空军军医大学军事生物医学工程学系,西安 710032)
0 引言
生物雷达是一种通过提取雷达回波中与生命体征(呼吸、心跳等)相关的信号,非接触、远距离且能穿透一定介质(砖墙、混凝土、废墟等)实现生命体探测、生命体征监测、生命体区分、生命体成像和定位等功能的技术,在灾后救援、医学监测、反恐维稳、战场搜救等领域显示出了很大的优越性和广阔的应用前景[1-12]。
然而,生物雷达在穿透条件下的多目标识别定位技术是一个难点,也是制约生物雷达技术进一步走向实用的瓶颈。从所能查阅到的文献资料来看,目前只有少数研究机构开展了基于生物雷达的多人体目标识别、定位研究,而且相当一部分只能获取目标的径向距离信息[13-16]。少量既有距离又有方位信息的定位研究往往会对目标有一些限定条件,如在径向和测量方位上的目标之间需要间隔一定距离等[17],这影响了现有生物雷达的实用价值。多人体目标识别定位问题的解决将实现在穿透条件下同时对多个人体目标的探测定位,可以大大提高非接触生命探测的效率,扩大生物雷达的应用范围,从而促进生物雷达产业的进一步发展。
本文针对生物雷达多人体目标识别定位技术的难题,基于多基地脉冲超宽谱(impluse radio ultra wideband,IR-UWB)生物雷达系统,提出一种多人体目标的识别定位方法,即先采用回波二次拐点和相关系数相结合的方法进行目标识别和径向距离计算,再根据计算出的各目标在3个通道中的径向距离数据对目标进行定位。然后基于一发三收的多基地IR-UWB生物雷达系统,在实验室穿墙条件下采集3个人体目标的雷达回波数据,采用本文提出的方法进行信号处理和目标识别定位,并给出实验结果,得到相关结论。实验结果表明,本文提出的方法可以对废墟掩埋等穿透场景下的3个人体目标进行探测识别和定位,具有很高的实际应用价值。
1 多基地IR-UWB生物雷达系统及回波信号
多基地IR-UWB生物雷达系统原理结构框图如图1所示。在脉冲重复频率(pulserepeat frequency,PRF)振荡器的控制下,脉冲发生器以一定的PRF产生脉冲信号。产生的脉冲信号分成2路:一路经过发射电路调理整形成双极性脉冲信号,然后通过发射天线辐射出去;另一路脉冲信号被送入延时单元,并在微处理器的控制下产生一系列延时时间可调的距离门(距离门其实是一种采样脉冲信号,持续时间非常短)。由发射天线辐射出去的信号在遇到人体时发生反射,反射的雷达回波被接收天线接收后送入接收电路,在距离门的触发下进行选择性地采样、积分、放大,然后通过模数转换器(analog to digital converter,ADC)形成雷达回波信号。雷达回波信号在微处理器控制下经由Wi-Fi模块送到处理显示终端进行信号处理和结果显示。多基地IR-UWB生物雷达系统一共由3个通道组成:发射天线和其中1个接收天线组成1个收发通道,如图1所示的3个接收天线可分别与发射天线组合,形成3个通道。
图2为多基地IR-UWB生物雷达系统进行多人体目标穿墙探测识别的平面示意图,各雷达天线紧贴一堵24 cm厚的砖墙放置,距离地面1.15 m(对应成年人胸部的平均高度),其中发射天线Tx和接收天线Rx1紧挨放置于中间,组成雷达系统的中间通道,中间通道的数据主要用来进行目标个数的判别和各目标径向距离的确定;接收天线Rx2和接收天线Rx3分别置于发射天线Tx左侧1.2 m处和右侧1.2 m处(这里1.2 m是指从接收天线Rx3的中心到发射天线Tx的中心距离),并与发射天线组成左边通道和右边通道,左边通道和右边通道的数据主要用来对目标进行方向定位。

图2 多基地IR-UWB生物雷达系统穿墙探测示意图
本研究以其中一个通道为例,描述雷达回波信号的特点及其信号处理过程。在实际探测中,多基地IR-UWB生物雷达系统采样的回波信号经过采样、积分和放大后,存储在一个二维矩阵中,如图3所示。图中纵坐标为快时间维度,对应的是空间距离信息,即在空间上探测目标距离雷达的远近,单位为ns,快时间与距离的计算关系为:距离(m)=快时间(ns)×电磁波在介质中的传播速度(m/ns)/2;横坐标为慢时间维度,对应的是每一个距离点的信号随时间变化的情况,单位为s。分别沿纵坐标方向或横坐标方向任意抽出一组一维数据,就形成了快时间信号或慢时间信号,图4(a)和(b)分别显示了雷达回波快时间信号和慢时间信号的波形。多基地IR-UWB生物雷达时窗的窗宽决定了快时间信号的长度,本文实验中,一个快时间信号的时窗宽度设为80 ns,对应的探测距离为12 m。每个快时间信号由8 192个采样点组成,每采集2个完整快时间信号的时间间隔Ts为0.062 5 s,也就是说,慢时间信号的采样频率fs=1/Ts=16 Hz,满足奈奎斯特采样定律对人体呼吸信号采样的要求。
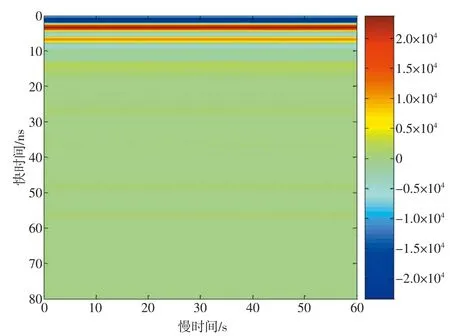
图3 多基地IR-UWB生物雷达系统回波信号(二维矩阵)

图4 多基地IR-UWB生物雷达系统回波信号波形图
多基地IR-UWB生物雷达系统探测人体呼吸信号示意图如图5所示。假设人体目标的胸壁表面与雷达之间的初始距离为d0,人体的呼吸会引起胸腔周期性的扩张和收缩,一般情况下,人体呼吸时胸腔壁的位移是一个关于慢时间的正弦函数x(t),那么人体目标的胸壁表面与雷达之间的实际距离d(t)将会根据人体的呼吸频率fr在d0附近发生周期性变化。人体胸壁表面与雷达之间的距离d(t)的计算公式如下:
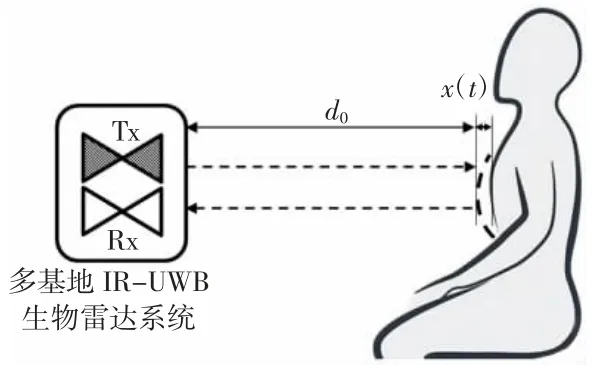
图5 多基地IR-UWB生物雷达系统探测人体呼吸信号示意图

式中,t表示慢时间;x(t)表示人体呼吸时胸壁的位移;Ar表示人体呼吸的最大幅度。
因为探测范围内的环境是静态的,人体目标也保持静止,只有呼吸引起胸壁运动,那么雷达系统的脉冲响应h(t,τ)将和呼吸运动一样随时间变化。雷达脉冲响应h(t,τ)的计算公式如下:


式中,c为电磁波在真空中的传播速度;τ0为电磁波走完从雷达到固定目标之间的距离所用的时间;τr为呼吸运动在快时间维度上的最大延时。如果忽略脉冲失真和其他非线性影响,就可以将雷达的回波信号看作是雷达发射脉冲和系统脉冲响应的卷积。那么在不考虑噪声存在的条件下,t时刻雷达的回波信号E(τ,t)为
式中,p(τ)为雷达的发射脉冲。
实际探测中,多基地IR-UWB生物雷达沿快时间方向在各离散时刻τ=mTf(m=1,2,…,M)对每个脉冲波形上的各点进行采样,而沿慢时间方向在每个离散时刻t=nTs(n=1,2,…,N)采样一次脉冲波形。采样后的回波信号存储为一个M×N二维数组E,数组E中的元素用E(m,n)表示:

式中,信号E(m,n)为一个二维信号,其中m为快时间方向的采样序数,n为慢时间方向的采样序数;p(mTf-τi)为雷达的静态目标脉冲回波;Tf和Ts分别为快时间信号和慢时间信号的采样周期。
2 信号处理和识别定位方法
2.1 信号预处理
原始的雷达回波信号数据量大、所需要的处理时间长,且其中有大量干扰、噪声存在,影响了人体生命特征提取和目标识别,因此在目标识别定位之前,先对各通道雷达回波进行信号预处理(以中间通道为例)。信号预处理流程图如图6所示,各步骤描述如下:

图6 信号预处理流程图
(1)快时间累积——在不影响有用信息的前提下,对雷达的原始回波数据E(m,n)沿着快时间维度进行距离累积,在大大降低雷达数据运算量的同时可以抑制快时间信号上的高频干扰。
(2)衰减补偿——以人体目标位置处相应的反射回波幅值为补偿基准,采取指数增益补偿的方法对距离累积后的雷达回波数据在快时间维度上进行衰减补偿。
(3)去均值——沿着慢时间维度,采用滑窗减平均的方法将补偿后的雷达回波信号中的静态杂波滤除,只留下人体生命信号。
(4)线性趋势消除——通过线性最小二乘拟合估计出去背景的回波信号在慢时间维度上的直流分量和低频线性漂移趋势后,再从回波数据中减去,从而移除回波信号中的线性基线漂移。
(5)低通滤波——用截止频率为0.5 Hz、阶数为120阶的低通滤波器在慢时间维度上对雷达回波信号进行低通滤波,从而有效滤除高频干扰,进一步提高雷达回波的信噪比。
(6)慢时间累积——将低通滤波后的快时间信号0200取绝对值以后沿慢时间轴(200~1 200)累加,形成一维能量信号E(l)(l=1,2,…,200)。
经过前述一系列信号处理以后,能量信号的幅值与生命体的生命信号密切相关,幅值越大,表明该距离处生命微动信号越强,越有可能是一个人体或者生物目标。
除了中间通道,同样按照以上的方法和步骤分别对左边通道、右边通道的回波信号进行处理,得到左边通道能量信号Eleft(l)和右边通道能量信号Eright(l)。本研究以3个通道的能量信号为主,结合中间通道的部分慢时间信号来进行多目标的个数判别和定位。
2.2 多人体目标识别定位
通过大量的多人体目标(包括无目标、单目标、双目标、三目标)穿墙探测实验,对数据进行特征分析和特征提取,最终形成以下多人体目标识别定位方法,其具体步骤描述如下:
(1)去除能量信号E(l)直达波,以消除收发天线之间的直达波对目标判别造成的影响。
将E(l)前50点数据置零,形成新的去除直达波以后的能量信号E1(l)。
(2)找出能量信号E1(l)的所有一次拐点。
由于电磁波传播的复杂性,很难直接从去除直达波后的能量信号E1(l)中找到被探测目标,因此需要去除干扰。雷达回波中一种影响目标识别的主要干扰是峰值附近的旁瓣干扰,并且峰值的旁瓣呈现出一种向两侧衰减的特点。所以在本步骤中通过拐点提取来识别峰值信号,即当某一点处的能量信号幅值比它左右两侧相邻点处的信号幅值都大时,则判别该点为一次拐点。一次拐点判别规则如下:

所有满足上式条件的点,称为一次拐点,将不满足一次拐点条件的各点对应的数值置零,满足条件的各点按原幅值、原位置存储在新的一维数组中形成一次拐点信号E2(l)。
(3)在一次拐点信号E2(l)的基础上找出所有二次拐点。
从实际处理结果来看,一次拐点信号E2(l)仍然有干扰存在,导致无法准确识别目标,尤其是无法准确识别多目标。因此作为一种优化的实施方式,对所述的一次拐点信号E2(l)进行二次拐点提取,获得二次拐点信号,即保留一次拐点信号E2(l)中所有满足以下条件的点,识别这些点为二次拐点:
式中,E2(l+a)为E2(l)右边第一个不为零的值;E2(lb)为E2(l)左边第一个不为零的值。
所有满足上式条件的点,称为二次拐点,将不满足二次拐点条件的各点对应的数值置零,满足条件的各点按原幅值、原位置存储在新的一维数组中形成二次拐点信号E3(l)。经过二次拐点提取之后的能量信号E3(l)去除了绝大部分峰值的旁瓣干扰,并最大程度地保留了各目标位置处的信号能量,可大大提高多目标识别的能力。
采用步骤(1)、(2)、(3)对左边通道能量信号Eleft(l)进行去直达波、一次拐点和二次拐点提取处理得到左边通道的二次拐点信号E3left(l)。同样地,得到右边通道的二次拐点信号E3right(l)。
(4)找出二次拐点信号E3(l)上的前3个最大值。
通过冒泡排序算法,找出中间通道二次拐点信号E3(l)上的第一大值E3-max1,位置记为lmax1。由于人体胸壁具有一定的厚度,所以其回波信号E3(l)不光在人体胸壁表面位置处有高能量幅值出现,而在该位置后面一段距离上的能量幅值都较高,将其称之为“拖尾”,“拖尾”现象影响了对多目标的个数判别。因为标记的E3(l)第一大值E3-max1所处位置lmax1的一定距离范围内不可能是其他目标,而只能是该位置处目标所产生的“拖尾”。为了去除这种“拖尾”,将最大值位置lmax1之后相邻的16个连续的幅值信号置零。
在去除最大值“拖尾”后的信号中通过冒泡排序算法找出第二大值E3-max2,位置记为lmax2。同样将lmax2位置之后相邻的16个连续的幅值信号置零,以去除第二大值的“拖尾”。继续在去除第二大值“拖尾”后的信号中通过冒泡排序算法找出第三大值E3-max3,位置记为lmax3。二次拐点信号E3(l)的3个最大值以及“拖尾”现象示意图如图7所示。
去除中间通道第一大值和第二大值“拖尾”后的二次拐点信号E3(l)如图8所示,在这个信号的基础上进行目标个数的判别。

图8 中间通道去除“拖尾”后的二次拐点信号E3(l)
采用以上方法,陆续找出左边通道二次拐点信号E3left(l)上的前3个最大值E3left-max1、E3left-max2、E3left-max3(即信号E3left(l)中的第一大值、第二大值和第三大值),其中第一大值、第二大值在找到后需要去除“拖尾”后再寻找第三大值,找到的前3个最大值位置分别记为lleft-max1、lleft-max2、lleft-max3。同样地,得到右边通道二次拐点信号E3right(l)上的前3个最大值E3right-max1、E3right-max2、E3right-max3(找到的前3个最大值位置分别记为lright-max1、lright-max2、lright-max3)。
(5)计算二次拐点信号E3(l)背景均值。
计算中间通道二次拐点信号E3(l)中去除3个最大值及前2个大值“拖尾”后剩余非零值的均值Bave,作为背景。
(6)分别计算前3个最大值的波峰-背景比值。
中间通道二次拐点信号的第一大值E3-max1除以二次拐点信号背景均值Bave得到第一大值的波峰-背景比值,即;二次拐点信号的第二大值E3-max2除以二次拐点信号背景均值Bave得到第二大值的波峰-背景比值,即;二次拐点信号的第三大值E3-max3除以二次拐点信号背景均值Bave得到第三大值的波峰-背景比值,即VEtoB3=
(7)计算相关系数均值。
在低通滤波后的雷达回波信号中(以中间通道为例),抽出二次拐点信号第一大值位置lmax1处的慢时间信号,记为Emax1(n),并且抽出与该位置相邻的前3个、后3个共6个位置,即lmax1-3、lmax1-2、lmax1-1、lmax1+1、lmax1+2、lmax1+3处的慢时间信号,分别记为Emax1-3(n)、Emax1-2(n)、Emax1-1(n)、Emax1+1(n)、Emax1+2(n)、Emax1+3(n),分别计算这6个慢时间信号与信号Emax1(n)的相关系数。以计算信号Emax1-3(n)与信号Emax1(n)的相关系数为例,相关系数计算公式如下:
按照以上公式计算出来的6个相关系数分别记为r1、r2、r3、r4、r5、r6,然后计算二次拐点信号第一大值lmax1位置处的6个相关系数的均值rm1,计算公式如下:

参照以上步骤,在低通滤波后的雷达回波信号中,抽出二次拐点信号第二大值位置lmax2处的慢时间信号,记为Emax2(n),并且抽出与该位置相邻的前3个、后3个共6个位置lmax2-3、lmax2-2、lmax2-1、lmax2+1、lmax2+2、lmax2+3处的慢时间信号,分别计算这6个慢时间信号与信号Emax2(n)的相关系数,并求出这6个相关系数的均值rm2。
同样地,抽出二次拐点信号第三大值位置lmax3处的慢时间信号Emax3(n),并且抽出与该位置相邻的6个位置处的慢时间信号,分别计算这6个慢时间信号与信号Emax3(n)的相关系数,并求出这6个相关系数的均值rm3。
(8)多人体目标个数判别。
通过上述步骤,计算出了中间通道二次拐点信号E3(l)上的前3个最大值E3-max1、E3-max2、E3-max3,以及其对应的位置lmax1、lmax2、lmax3;计算出了目标k(k=1,2,3)的波峰-背景比VEtoBk,并计算出了该位置处的慢信号与其相邻的6个慢信号的相关系数均值rm1、rm2和rm3。
VEtoBk的计算公式如下:
式中,E3-maxk为某通道二次拐点信号E3(l)上的第k个最大值;ak为常系数,在背景信号能量水平(含噪声)相同的条件下,人体目标k的胸壁面积越大反射能量越强,呼吸幅度越大呼吸信号能量越强,此时目标k的波峰-背景比VEtoBk越大。在多人体目标场景下,二次拐点信号前3个最大值E3-max1、E3-max2、E3-max3的幅值是依次递减的,而二次拐点信号背景均值Bave为同一个值,因此针对不同目标需要设定不同阈值进行识别。
rmk的计算公式如下:

式中,bk为常系数,在噪声水平相同的条件下,人体目标k的胸壁厚度(从前胸到后背的距离)越厚,其对应各距离点的呼吸信号(慢时间信号)越反映为有规律的呼吸信号,即r1k~r6k均呈现为较高的值,且较为一致,故均值rmk越大;而人体目标k的呼吸规律程度越高,则目标距离点处呼吸信号与其左右相邻的几个慢时间信号的相关性越高,均值rmk越大。根据该特点本研究确定以下流程来进行人体目标个数判别,如图9所示。

图9 多人体目标个数判别方法流程图
(9)人体目标定位。
本研究以目标2为例说明其定位方法。前面已经分别计算出了中间通道、左边通道、右边通道的二次拐点信号第二大值的位置lmax2、lleft-max2、lright-max2。目标2的径向距离为lmax2对应的距离,即12*lmax2/200 m,下面按照以下原则确定目标2处于探测区域的左半区域、右半区域还是径向中轴上。
①若左边通道第二大值位置减去右边通道第二大值位置的绝对值≤2(即2个通道第二大值位置距离差的绝对值≤0.12 m),即|lleft-max2-lright-max2|≤2,则目标2在中轴线上;
②若左边通道第二大值位置减去右边通道第二大值位置的值<-2(右通道与左通道第二大值位置距离差>0.12 m),即lleft-max2-lright-max2<-2,则目标2在中轴线的左半区域;
③若左边通道第二大值位置减去右边通道第二大值位置的值>2(左通道与右通道第二大值位置距离差>0.12 m),即lleft-max2-lright-max2>2,则目标2在中轴线的右半区域。
根据同样的原则,利用中间通道、左边通道、右边通道的二次拐点信号第一大值的位置lmax1、lleft-max1、lright-max1对目标1进行定位,利用中间通道、左边通道、右边通道的二次拐点信号第三大值的位置lmax3、lleft-max3、lright-max3对目标3进行定位,这样就完成了对所有3个目标的定位。
3 实验结果
3.1 实验场景
为了验证以上方法的有效性,本研究采用多基地IR-UWB生物雷达系统进行了实验室条件下的多人体目标识别定位实验。
选择3名健康青年男性(目标1、目标2和目标3)进行穿透单砖墙条件下的探测实验。其中目标1静止站立于墙后2.3 m远处偏右侧方向,目标2静止站立于墙后5.7 m远处偏左侧方向,目标3静止站立于墙后7.8 m远处中轴线方向,实际探测定位场景如图10所示。
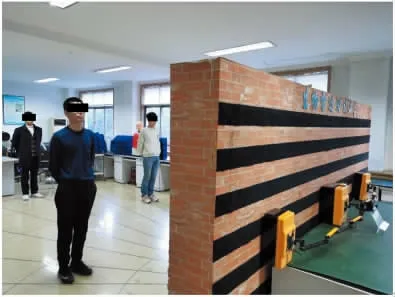
图10 三目标探测实验场景图
3.2 实验结果
采用多基地IR-UWB生物雷达系统穿墙探测后,对3个通道的雷达回波信号进行处理和计算,各项数据的结果为:VEtoB1=4.01、VEtoB2=2.93、VEtoB3=2.17,rm1=0.97、rm2=0.95、rm3=0.89。根据上文的多目标人数判别方法流程可以判断该次探测结果为3个人体目标。而且,由中间通道去除“拖尾”后的二次拐点信号前3个最大值的位置lmax1、lmax2、lmax3可知,3个目标的径向距离分别为2.34、5.64、7.86 m,与实际距离误差均小于0.1 m。在确定各目标径向距离以后,结合左边通道前3个最大值位置和右边通道前3个最大值位置可以确定目标1位于探测区域右侧方向,目标2位于探测区域左侧方向,目标3位于探测区域中轴线方向。本次实验的探测结果与实际3个目标站立分布情况相符,雷达识别定位结果正确,三目标识别定位结果如图11所示。

图11 三目标识别定位结果图
4 结语
本文基于多基地IR-UWB生物雷达系统对多人体目标的雷达回波信号进行处理,得到目标k的波峰-背景比和该位置处的慢时间信号与其相邻的6个慢时间信号的相关系数均值,根据多人体目标判别方法流程可以判断探测的人体目标个数,然后利用中间通道、左边通道、右边通道的二次拐点信号最大值的位置对目标进行定位。实验结果表明,多基地IRUWB生物雷达系统可以对多人体目标进行正确识别和定位。本文提出的雷达系统和方法可以大大提高非接触生命探测的效率,满足实际探测中多人体目标的探测定位需求,具有广阔的应用前景。该方法目前最多只能实现对3个目标的识别定位,而且本研究中的目标定位验证实验次数较少,因此该方法的鲁棒性还需要进一步验证。在后续研究中,将进一步对多人目标的识别和定位方法进行优化,以提高目标探测定位的准确率,提升生物雷达探测效率。
猜你喜欢
电力安全技术(2024年3期)2024-06-11 02:43:29
大自然探索(2023年7期)2023-08-15 00:48:21
艺术品鉴(2020年4期)2020-07-24 08:17:20
广州化工(2020年5期)2020-04-01 07:38:52
农民致富之友(2019年30期)2019-10-21 04:53:16
艺术品鉴(2019年8期)2019-09-18 01:23:00
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
红岩春秋(2017年6期)2017-07-03 16:43:54
火控雷达技术(2016年3期)2016-02-06 02:30:26
百科探秘·航空航天(2015年4期)2015-11-07 07:04:34
